
Lektion 1: Einführung in das Teach Pendant
In der vorherigen Einheit haben Sie das manuelle Bewegen des 6-Achsen-Roboterarms entlang der X-, Y- und Z-Achse erkundet. Sie haben gelernt, das Teach Pendant in VEXcode EXP zu verwenden, um manuelle Bewegungen zu ermöglichen und (x, y, z)-Koordinaten zu erfassen.
In dieser Lektion erfahren Sie mehr über das Teach Pendant, darunter:
- So werden Teach-Pendants in der Industrierobotik eingesetzt.
- Hauptfunktionen des Teach Pendant in VEXcode EXP.
- So bewegen Sie den 6-Achsen-Arm mithilfe des Teach Pendant.
Am Ende dieser Lektion können Sie den 6-Achsen-Arm mit dem Teach Pendant schrittweise entlang der X-, Y- und Z-Achse bewegen.
Das Teach Pendant in VEXcode EXP
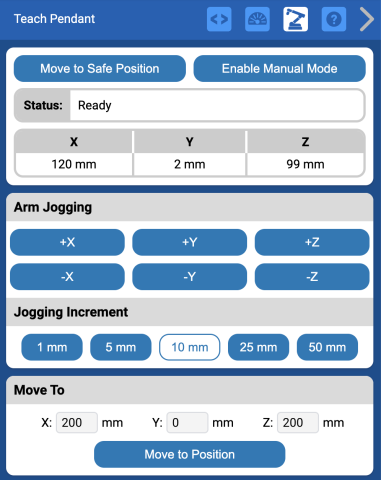
Das Teach Pendant in VEXcode EXP verfügt über viele nützliche Funktionen, mit denen Sie den 6-Achsen-Arm steuern können. Diese Lektion konzentriert sich auf die Funktionen, die Sie in dieser Einheit verwenden werden.
Was ist ein Teach-Pendant?
Ein Teach Pendant ist ein in der Industrierobotik häufig verwendetes Gerät, das es einem Benutzer ermöglicht, einen Roboterarm ferngesteuert und manuell zu steuern. Mithilfe von Teach Pendants können Sie eine Reihe von Bewegungen ausführen und diese testen und verfeinern, sodass sie präzise sind. Damit kann der Benutzer den Roboter in Echtzeit überwachen und auftretende Probleme beheben. Zudem trägt es entscheidend zur Sicherheit bei, da es dem Benutzer ermöglicht, aus der Ferne mit dem Roboter zu arbeiten.

Teach-Pendant-Dashboard
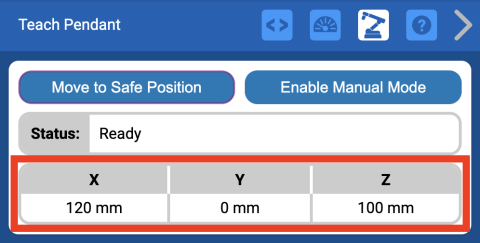
Die x-, y- und z-Koordinaten des 6-Achsen-Arms können in Echtzeit auf dem Teach Pendant Dashboard angezeigt werden. Sie haben diese Funktion beim Erfassen der Koordinaten bestimmter Kachelnummern in der vorherigen Einheit verwendet.
Das Dashboard bleibt immer oben auf dem Teach Pendant, auch beim Scrollen, um andere Funktionen des Teach Pendant zu verwenden, wie in diesem Video gezeigt.
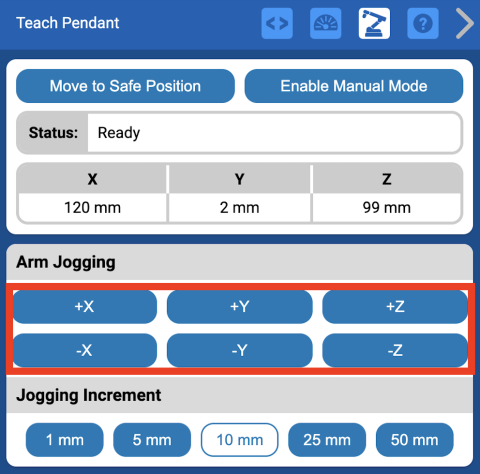
Armjogging
Mit dem Teach Pendant können Sie den 6-Achsen-Arm in kleinen Schritten entlang der X-, Y- und Z-Achse bewegen. Dies nennt man Joggen.
Auch die Schrittweite der Bewegung beim Joggen lässt sich verändern.
Später in dieser Lektion erfahren Sie mehr über das Joggen.
Magnet
Das Teach Pendant verfügt außerdem über Tasten, mit denen der Magnet aktiviert und freigegeben werden kann.
Sie werden diese Schaltflächen in Lektion 2 dieser Einheit verwenden, um Datenträger mit dem 6-Achsen-Arm aufzunehmen und zu bewegen.

Bewegen des 6-Achsen-Arms mit dem Teach Pendant
Durch Jogging kann der 6-Achsen-Arm schrittweise von einer Position zur anderen bewegt werden. Dies ist nützlich, wenn Sie die Position des 6-Achsen-Arms leicht ändern möchten. Dadurch können Sie den 6-Achsen-Arm präziser positionieren.
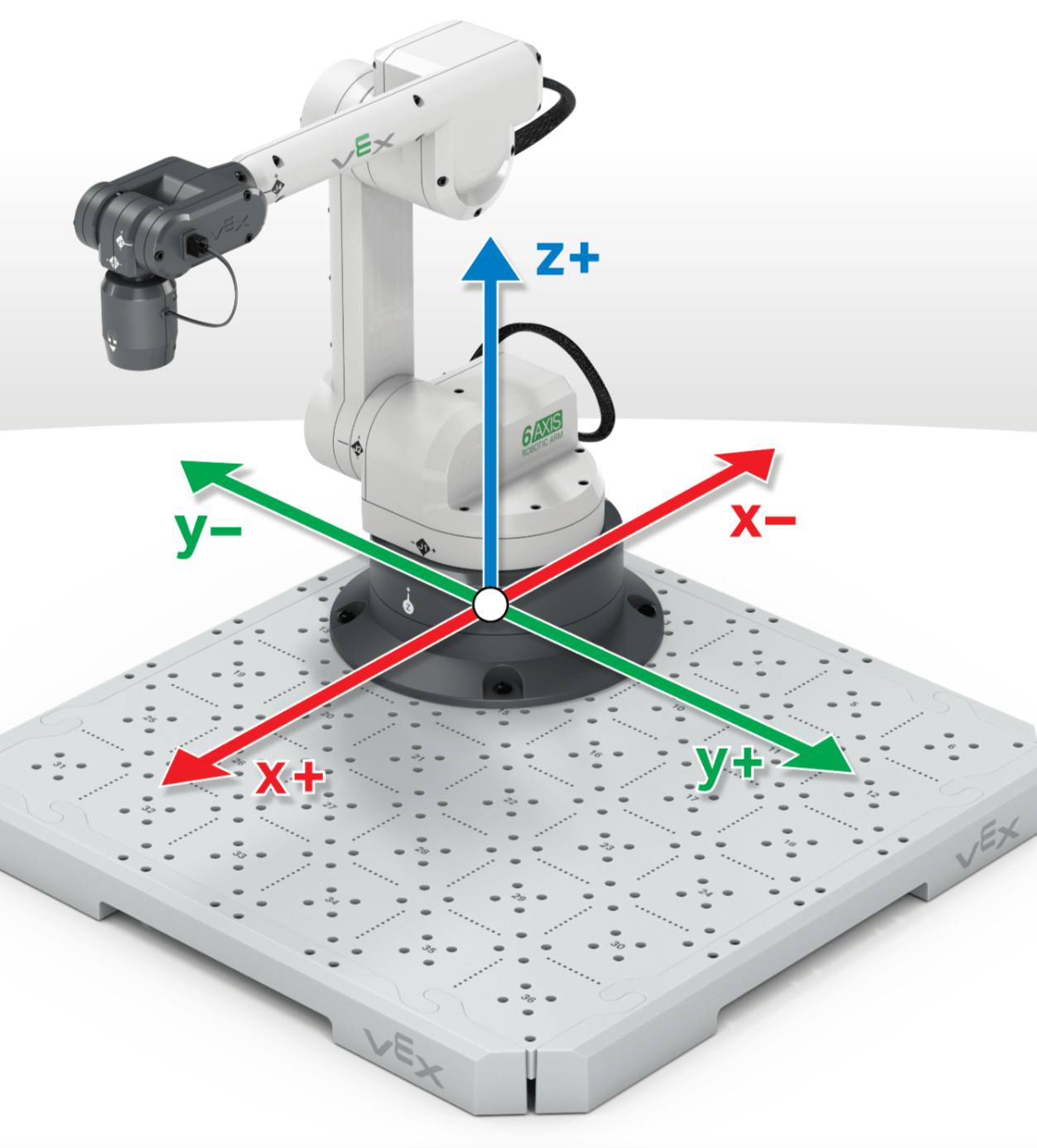
Sie können den 6-Achsen-Arm entlang einer der drei Achsen bewegen, indem Sie die entsprechenden Achsenschaltflächen auf dem Teach Pendant auswählen. Sehen Sie sich dieses Video an, um ein Beispiel für das Joggen des 6-Achsen-Arms mit dem Teach Pendant zu sehen. Im Video werden die Plus- und Minustasten der jeweiligen Achsen gedrückt. Der 6-Achsen-Arm bewegt sich von der Basis weg, wenn die positiven Tasten gedrückt werden, und dann wieder zurück zur Basis, wenn die negativen Tasten auf jeder Achse gedrückt werden.
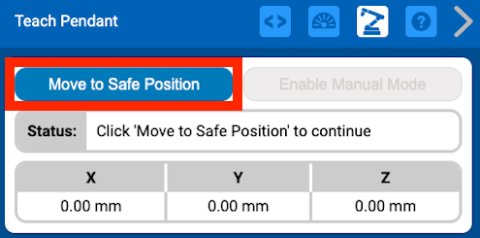
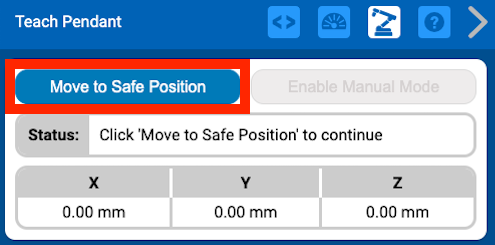
Wählen Sie Zur sicheren Position bewegen“ , um die Jogging-Funktion des Teach Pendants zu aktivieren.
Das Teach Pendant wird deaktiviert, bis „Zur sicheren Position bewegen“ ausgewählt wird.
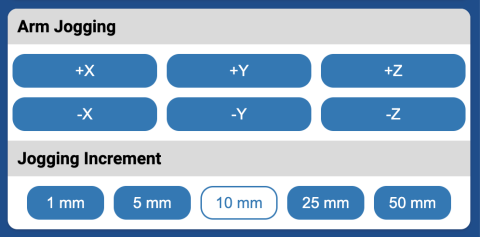
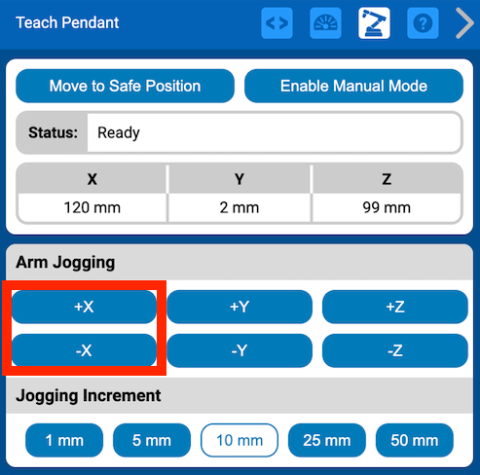
Mit den Arm-Jogging-Tasten können Sie den 6-Achsen-Arm schrittweise entlang der X-, Y- oder Z-Achse bewegen.
Später in dieser Lektion üben Sie das Bewegen des 6-Achsen-Arms.
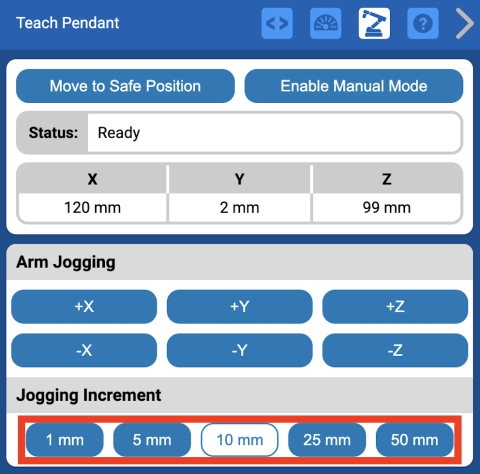
Sie können das Jogging-Inkrement ändern, um jede inkrementelle Bewegung des 6-Achsen-Arms zu erhöhen oder zu verringern.
Die Standardschrittweite beträgt 10 Millimeter (mm).
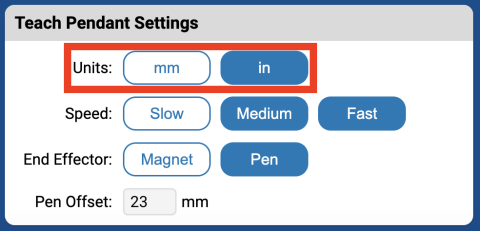
Sie können im Abschnitt „Teach Pendant-Einstellungen“ auch die im Teach Pendant angezeigten Einheiten von Millimetern (mm) in Zoll (in) ändern. Die Teach Pendant-Einstellungen befinden sich an der Unterseite des Teach Pendants.
Dadurch werden die Koordinateneinheiten im Teach Pendant Dashboard sowie die
Jogging-Inkrement-Optionen geändert.
Üben Sie das Joggen des 6-Achsen-Arms
Nachdem Sie nun wissen, was Joggen ist, üben Sie das Joggen mit dem 6-Achsen-Arm selbst.
Stellen Sie sicher, dass der 6-Achsen-Arm mit VEXcode verbunden und das Teach Pendant geöffnet ist.
Wählen Sie Zur sicheren Position bewegen“ , um das Teach Pendant zu aktivieren.
Üben Sie zunächst das Joggen entlang der X-Achse. Wählen Sie die Schaltflächen – X und + X im Teach Pendant. Beobachten Sie, wie sich der 6-Achsen-Arm bei jedem Drücken der Taste bewegt.
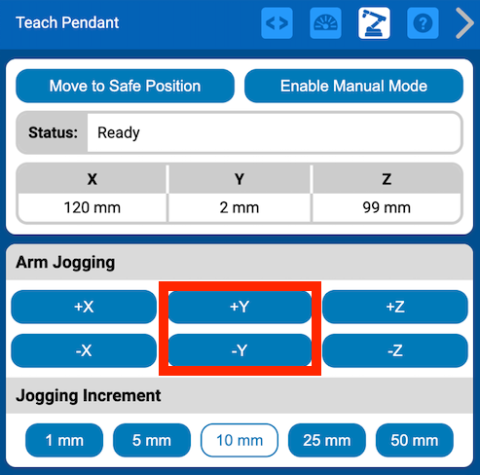
Üben Sie als Nächstes das Joggen entlang der Y-Achse. Wählen Sie die Schaltflächen – Y und + Y im Teach Pendant. Beobachten Sie, wie sich der 6-Achsen-Arm bei jedem Drücken der Taste bewegt.
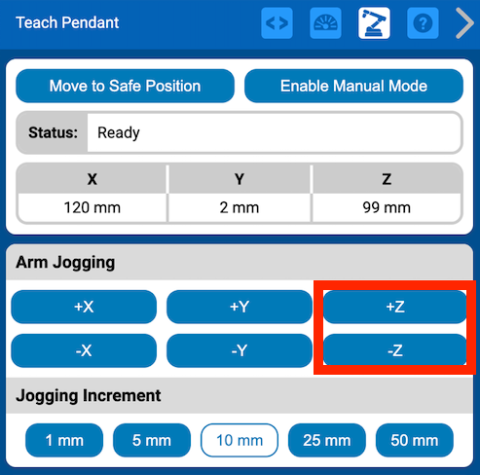
Üben Sie nun das Joggen entlang der Z-Achse. Wählen Sie die Schaltflächen – Z und + Z im Teach Pendant. Beobachten Sie, wie sich der 6-Achsen-Arm bei jedem Drücken der Taste bewegt.
Aktivität
Nachdem Sie nun gelernt haben, wie Sie den 6-Achsen-Arm bewegen, üben Sie das Bewegen entlang der X-, Y- und Z-Achse.
In dieser Aktivität üben Sie das Bewegen des 6-Achsen-Arms entlang jeder Achse. Während Sie den 6-Achsen-Arm bewegen, zeichnen Sie auf, wie sich die X-, Y- und Z-Werte im Teach Pendant Dashboard ändern.
Stellen Sie sicher, dass der 6-Achsen-Arm mit VEXcode EXP verbunden ist und dass Zur sicheren Position bewegen“ ausgewählt ist, bevor Sie versuchen, den 6-Achsen-Arm zu bewegen.
Befolgen Sie jeden Schritt und notieren Sie Ihre Antworten auf die Fragen in Ihrem technischen Notizbuch:
X-Achse:
- Positionieren Sie den 6-Achsen-Arm mit dem Tool Center Point (TCP) über der Nummer 32 auf der Kachel.
- Bewegen Sie ihn, bis der TCP über der Zahl 20 positioniert ist, indem Sie den 6-Achsen-Arm bewegen.
- Bewegen Sie den 6-Achsen-Arm zurück zur Nummer 32.
- Beantworten Sie die folgende Frage in Ihrem technischen Notizbuch: Wie ändert sich der x-Wert im Teach Pendant Dashboard, wenn Sie den 6-Achsen-Arm bewegen?
Y-Achse:
- Positionieren Sie den 6-Achsen-Arm mit dem Tool Center Point (TCP) über Nummer 12 auf der Kachel.
- Bewegen Sie ihn, bis der TCP über der Zahl 10 positioniert ist, indem Sie den 6-Achsen-Arm bewegen.
- Bewegen Sie den 6-Achsen-Arm zurück auf Nummer 12.
- Beantworten Sie die folgende Frage in Ihrem technischen Notizbuch: Wie ändert sich der Y-Wert im Teach Pendant Dashboard, wenn Sie den 6-Achsen-Arm bewegen?
Z-Achse:
- Positionieren Sie den 6-Achsen-Arm mit dem Tool Center Point (TCP) über der Nummer 29 auf der Kachel.
- Bewegen Sie ihn nach oben, sodass der TCP durch Bewegen des 6-Achsen-Arms etwa 70 mm von der Kachel entfernt ist.
- Bewegen Sie den 6-Achsen-Arm zurück nach unten in seine ungefähre Ausgangsposition über Nummer 29.
- Beantworten Sie die folgende Frage in Ihrem technischen Notizbuch: Wie ändert sich der Z-Wert im Teach Pendant Dashboard, wenn Sie den 6-Achsen-Arm bewegen?
Überprüfen Sie Ihr Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die Konzepte dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum „Überprüfen Sie Ihr Verständnis“ > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > um mehr über Endeffektoren zu erfahren.