
บทที่ 1: บทนำสู่ Teach Pendant
ในหน่วยก่อนหน้านี้ คุณได้สำรวจการเคลื่อนย้ายแขนหุ่นยนต์ 6 แกนด้วยตนเองไปตามแกน x, y และ z คุณได้เรียนรู้การใช้งาน Teach Pendant ใน VEXcode EXP เพื่อเปิดใช้งานการเคลื่อนที่ด้วยตนเองและรวบรวมพิกัด (x, y, z)
ในบทเรียนนี้ คุณจะได้เรียนรู้เพิ่มเติมเกี่ยวกับ Teach Pendant รวมถึง:
- จี้สอนใช้ในหุ่นยนต์อุตสาหกรรมอย่างไร
- คุณสมบัติหลักของ Teach Pendant ใน VEXcode EXP.
- วิธีการจ็อกแขน 6 แกนโดยใช้ Teach Pendant
เมื่อสิ้นสุดบทเรียนนี้ คุณจะสามารถใช้ Teach Pendant เพื่อย้ายแขน 6 แกนไปตามแกน x, y และ z ตามลำดับได้
จี้สอนใน VEXcode EXP
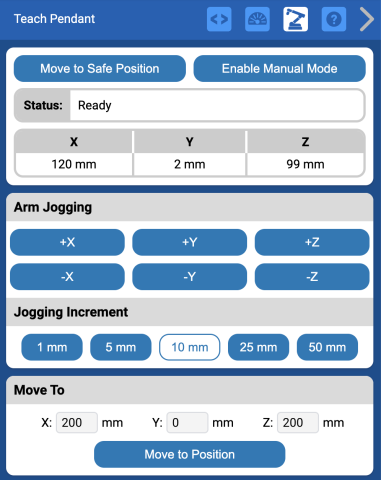
Teach Pendant ใน VEXcode EXP มีคุณสมบัติที่มีประโยชน์มากมายที่คุณสามารถใช้ควบคุมแขน 6 แกนได้ บทเรียนนี้จะเน้นที่คุณลักษณะที่คุณจะใช้ในหน่วยนี้
Teach pendant คืออะไร?
จี้สอนเป็นอุปกรณ์ที่ใช้กันทั่วไปในหุ่นยนต์ในอุตสาหกรรม ซึ่งช่วยให้ผู้ใช้สามารถควบคุมแขนหุ่นยนต์จากระยะไกลและด้วยตนเองได้ จี้สอนสามารถใช้เพื่อทำการเคลื่อนไหวชุดหนึ่งและทดสอบและปรับแต่งเพื่อให้แม่นยำ มันช่วยให้ผู้ใช้สามารถตรวจสอบหุ่นยนต์ได้แบบเรียลไทม์ แก้ไขปัญหาต่างๆ ที่เกิดขึ้น และมีบทบาทสำคัญด้านความปลอดภัยด้วยการทำให้ผู้ใช้สามารถทำงานร่วมกับหุ่นยนต์ได้จากระยะไกล

สอนทำแผงหน้าปัดจี้
สามารถมองเห็นพิกัด x, y, z ของ 6-Axis Arm ได้แบบเรียลไทม์บน Teach Pendant Dashboard คุณใช้คุณลักษณะนี้เมื่อรวบรวมพิกัดของหมายเลขไทล์เฉพาะในหน่วยก่อนหน้า
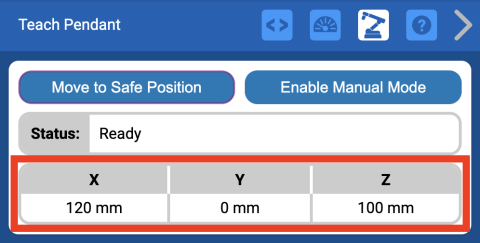
แดชบอร์ดจะยังคงอยู่ที่ด้านบนของ Teach Pendant ตลอดเวลา แม้ในขณะที่เลื่อนเพื่อใช้ฟีเจอร์อื่นๆ ของ Teach Pendant ตามที่แสดงในวิดีโอนี้
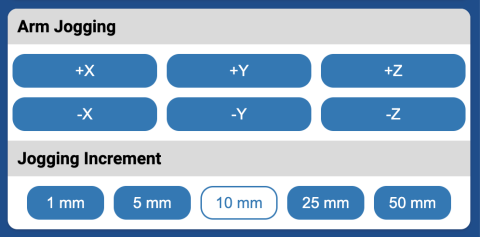
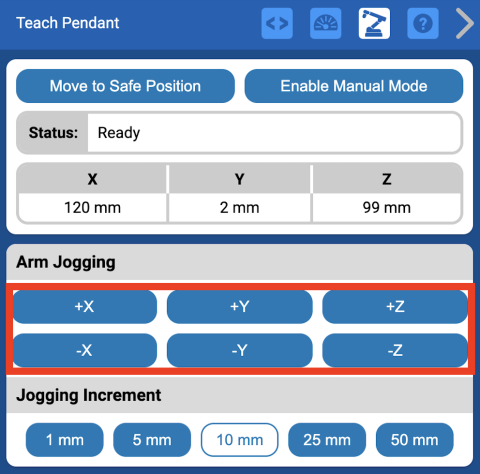
การจ็อกกิ้งแขน
Teach Pendant ช่วยให้คุณสามารถเลื่อนแขน 6 แกนไปตามแกน x, y และ z ในปริมาณที่เพิ่มขึ้นเล็กน้อย นี่เรียกว่าการจ็อกกิ้ง
คุณยังสามารถเปลี่ยนการเพิ่มขึ้นของการเคลื่อนไหวขณะจ็อกกิ้งได้
คุณจะเรียนรู้เพิ่มเติมเกี่ยวกับการจ็อกกิ้งในภายหลังในบทเรียนนี้
แม่เหล็ก
นอกจากนี้ Teach Pendant ยังมาพร้อมกับปุ่มที่ใช้สำหรับเปิดและปิดแม่เหล็กอีกด้วย
คุณจะใช้ปุ่มเหล่านี้ในบทเรียนที่ 2 ของหน่วยนี้เพื่อหยิบและเคลื่อนย้ายดิสก์ด้วยแขน 6 แกน

การจ็อกกิ้งแขน 6 แกนโดยใช้ Teach Pendant
สามารถใช้การจ็อกกิ้งเพื่อย้ายแขน 6 แกนทีละตำแหน่งจากตำแหน่งหนึ่งไปยังอีกตำแหน่งหนึ่งได้ สิ่งนี้มีประโยชน์เมื่อคุณต้องการเปลี่ยนตำแหน่งของแขน 6 แกนเล็กน้อย สิ่งนี้ช่วยให้คุณวางตำแหน่งแขน 6 แกนได้แม่นยำยิ่ง
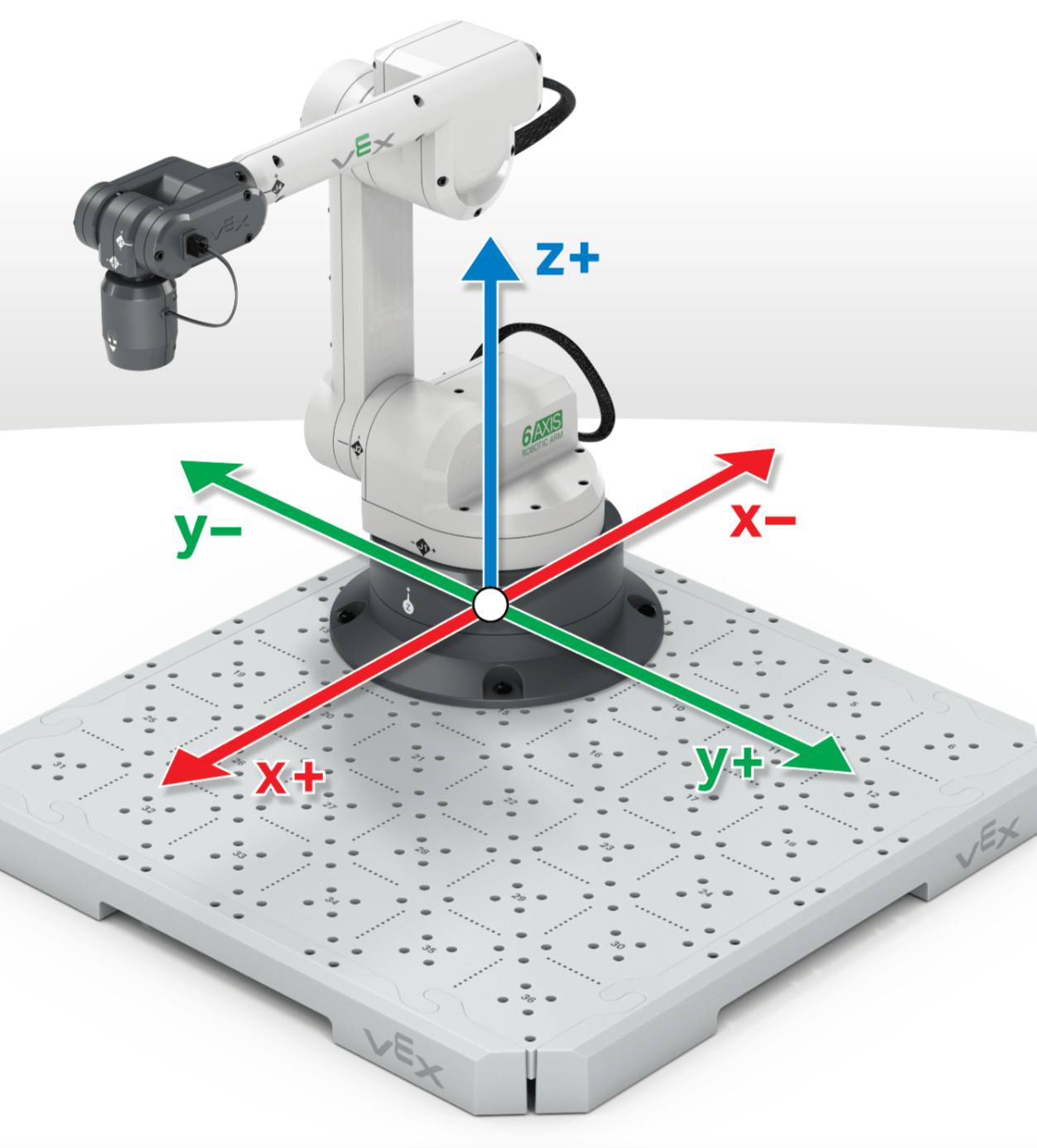
คุณสามารถย้ายแขน 6 แกนไปตามแกนใดแกนหนึ่งจากสามแกนได้โดยเลือกปุ่มแกนที่เกี่ยวข้องจาก Teach Pendant ดูวิดีโอนี้เพื่อดูตัวอย่างการจ็อกกิ้งแขน 6 แกนด้วย Teach Pendant ในวิดีโอนี้จะมีการกดปุ่มบวกและลบของแต่ละแกน แขน 6 แกนจะเคลื่อนออกห่างจากฐานเมื่อกดปุ่มบวก จากนั้นเคลื่อนกลับมาที่ฐานเมื่อกดปุ่มลบบนแต่ละแกน
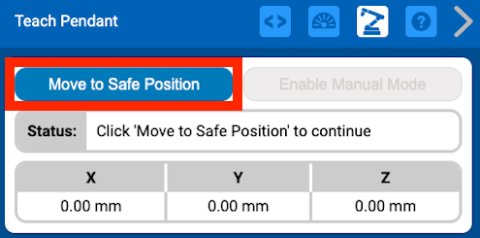
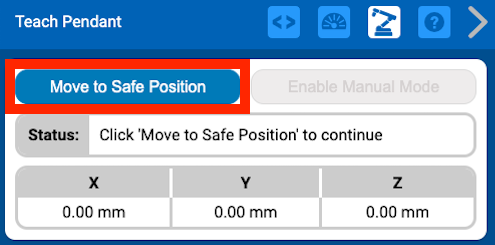
เลือก ย้ายไปที่ตำแหน่งปลอดภัย เพื่อเปิดใช้งานคุณสมบัติการจ็อกกิ้งของ Teach Pendant
จี้สอนจะถูกปิดใช้งานจนกว่าจะเลือก ย้ายไปที่ตำแหน่งปลอดภัย
คุณสามารถใช้ปุ่ม Arm Jogging เพื่อย้าย Arm 6 แกนไปทีละน้อยตามแกน x, y หรือ z
คุณจะได้ฝึกการจ็อกกิ้งแขน 6 แกนในภายหลังในบทเรียนนี้
คุณสามารถเปลี่ยนค่าการเพิ่มการจ็อกกิ้ง เพื่อเพิ่มหรือลดการเคลื่อนไหวเพิ่มขึ้นแต่ละครั้งที่จ็อกกิ้งแขน 6 แกน
ค่าเพิ่มเริ่มต้นคือ 10 มิลลิเมตร (มม.)
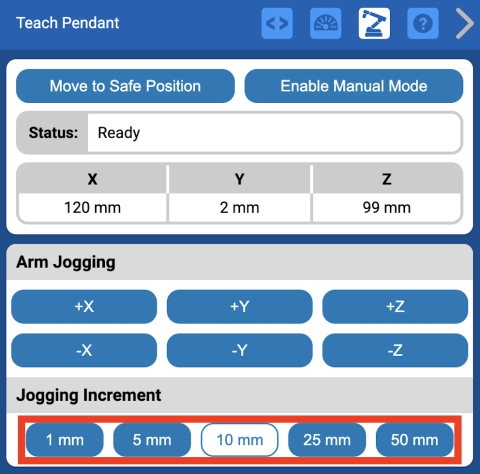
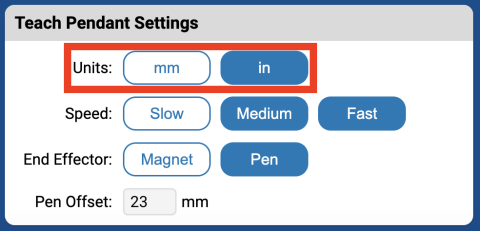
คุณสามารถเปลี่ยนหน่วยที่แสดงใน Teach Pendant จากมิลลิเมตร (มม.) เป็นนิ้ว (นิ้ว) ได้ในส่วนการตั้งค่า Teach Pendant การตั้งค่า Teach Pendant จะอยู่ที่ด้านล่างของ Teach Pendant
การเปลี่ยนแปลงนี้จะเปลี่ยนหน่วยพิกัดในแผงควบคุม Teach Pendant เช่นเดียวกับตัวเลือก Jogging
Increment
ฝึกการจ็อกกิ้งแขน 6 แกน
ตอนนี้คุณรู้แล้วว่าการจ็อกกิ้งคืออะไร คุณจะฝึกการ อกกิ้งแขน 6 แกนด้วยตัวเอง
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode และจี้การสอนเปิดอยู่
เลือก ย้ายไปที่ตำแหน่งปลอดภัย เพื่อเปิดใช้งานการสอนจี้
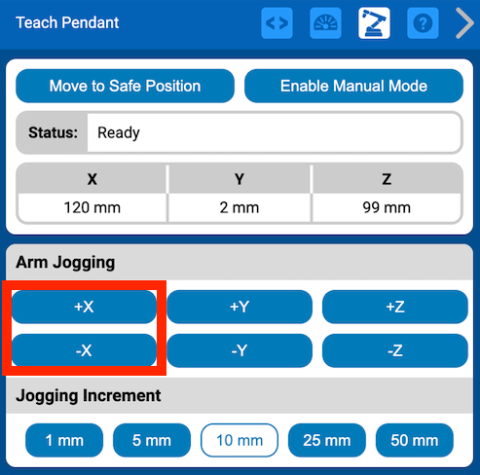
ขั้นแรก ให้ฝึกวิ่งจ็อกกิ้งไปตามแกน x เลือกปุ่ม – X และ + X ใน Teach Pendant สังเกตว่าแขน 6 แกนเคลื่อนไหวอย่างไรทุกครั้งที่กดปุ่ม
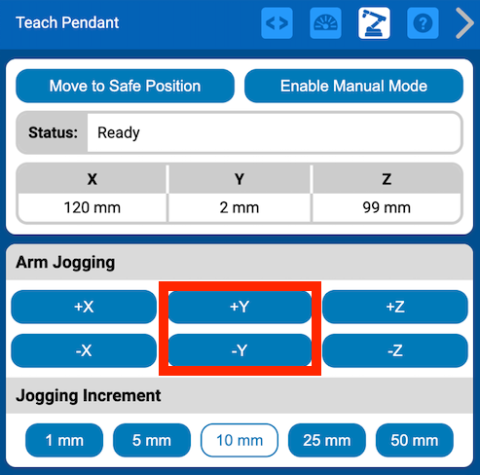
ต่อไป ให้ฝึกการจ็อกกิ้งไปตามแกน y เลือกปุ่ม – Y และ + Y ใน Teach Pendant สังเกตว่าแขน 6 แกนเคลื่อนไหวอย่างไรทุกครั้งที่กดปุ่ม
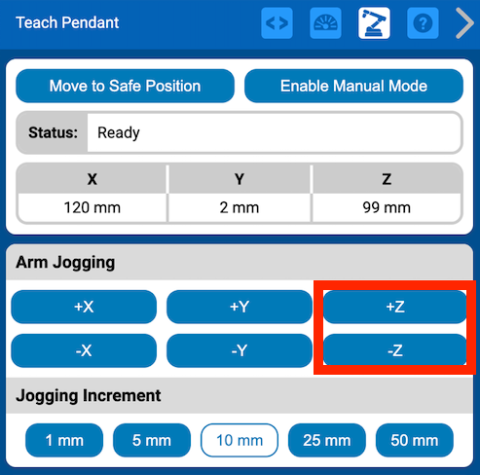
ตอนนี้ ฝึกการจ็อกกิ้งไปตามแกน z เลือกปุ่ม – Z และ + Z ใน Teach Pendant สังเกตว่าแขน 6 แกนเคลื่อนไหวอย่างไรทุกครั้งที่กดปุ่ม
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีการจ็อกแขน 6 แกนแล้ว คุณจะฝึกการจ็อกไปตามแกน x, y และ z
ในกิจกรรมนี้ คุณจะได้ฝึกการจ็อกกิ้งแขน 6 แกนไปตามแต่ละแกน ขณะที่คุณเคลื่อนแขน 6 แกน คุณจะบันทึกว่าค่า x, y และ z เปลี่ยนแปลงไปอย่างไรในแดชบอร์ด Teach Pendant
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode EXP และเลือก เคลื่อนที่ไปยังตำแหน่งปลอดภัย ก่อนที่จะพยายามจ็อกแขน 6 แกน
ปฏิบัติตามแต่ละขั้นตอนและบันทึกคำตอบของคุณสำหรับคำถามลงในสมุดบันทึกวิศวกรรมของคุณ:
แกน X:
- วางแขน 6 แกนโดยให้จุดศูนย์กลางเครื่องมือ (TCP) อยู่เหนือหมายเลข 32 บนไทล์
- ย้ายจนกระทั่ง TCP อยู่เหนือหมายเลข 20 โดยจ็อกกิ้งแขน 6 แกน
- จ็อกแขน 6 แกนกลับไปที่หมายเลข 32
- ตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ: ค่า x เปลี่ยนแปลงอย่างไรใน Teach Pendant Dashboard ขณะที่คุณจ็อกแขน 6 แกน?
แกน Y:
- วางแขน 6 แกนโดยให้จุดศูนย์กลางเครื่องมือ (TCP) อยู่เหนือหมายเลข 12 บนไทล์
- ย้ายจนกระทั่ง TCP อยู่เหนือหมายเลข 10 โดยการจ็อกกิ้งแขน 6 แกน
- จ็อกแขน 6 แกนกลับไปที่หมายเลข 12
- ตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ: ค่า y เปลี่ยนแปลงอย่างไรใน Teach Pendant Dashboard เมื่อคุณจ็อกแขน 6 แกน?
แกน Z:
- วางแขน 6 แกนโดยให้จุดศูนย์กลางเครื่องมือ (TCP) อยู่เหนือหมายเลข 29 บนไทล์
- เลื่อนขึ้นเพื่อให้ TCP ห่างจาก Tile ประมาณ 70 มม. โดยเคลื่อนแขน 6 แกน
- จ็อกแขน 6 แกนกลับลงมาที่ตำแหน่งเดิมโดยประมาณเหนือหมายเลข 29
- ตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ: ค่า z เปลี่ยนแปลงอย่างไรใน Teach Pendant Dashboard เมื่อคุณจ็อกแขน 6 แกน?
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะเริ่มบทเรียนถัดไป ให้แน่ใจว่าคุณเข้าใจแนวคิดในบทเรียนนี้แล้วโดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
คำถามตรวจสอบความเข้าใจของคุณ > (Google Doc / .docx / .pdf)
เลือก ถัดไป > เพื่อเรียนรู้เกี่ยวกับเอฟเฟกเตอร์ปลายสุด