
Lezione 1: Introduzione al Teach Pendant
Nell'Unità precedente hai visto come muovere manualmente il braccio robotico a 6 assi lungo gli assi x, y e z. Hai imparato a usare il Teach Pendant in VEXcode EXP per abilitare il movimento manuale e raccogliere le coordinate (x, y, z).
In questa lezione imparerai di più sul Teach Pendant, tra cui:
- Come vengono utilizzati i teach pendant nella robotica industriale.
- Caratteristiche principali del Teach Pendant in VEXcode EXP.
- Come far muovere il braccio a 6 assi utilizzando il Teach Pendant.
Al termine di questa lezione sarai in grado di utilizzare il Teach Pendant per spostare gradualmente il braccio a 6 assi lungo gli assi x, y e z.
Il ciondolo didattico in VEXcode EXP
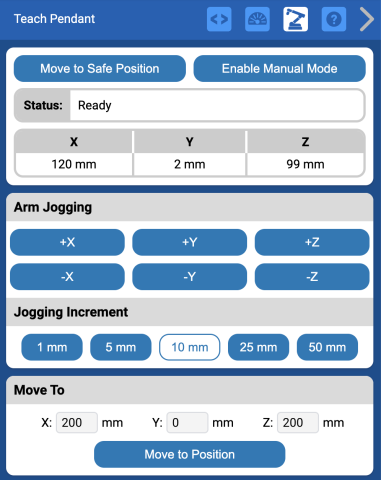
Il Teach Pendant in VEXcode EXP è dotato di numerose funzioni utili per controllare il braccio a 6 assi. Questa lezione si concentrerà sulle funzionalità che utilizzerai in questa unità.
Che cosa è un teach pendant?
Un teach pendant è un dispositivo comunemente utilizzato nella robotica industriale che consente all'utente di controllare un braccio robotico da remoto e manualmente. I ciondoli didattici possono essere utilizzati per eseguire una serie di movimenti e per testarli e perfezionarli affinché siano precisi. Permette all'utente di monitorare il robot in tempo reale, di risolvere i problemi man mano che si presentano e svolge un ruolo fondamentale in termini di sicurezza, consentendo all'utente di lavorare con il robot a distanza.

Pannello di controllo del ciondolo didattico
Le coordinate x, y, z del braccio a 6 assi possono essere visualizzate in tempo reale sul pannello di controllo del Teach Pendant. Hai utilizzato questa funzionalità durante la raccolta delle coordinate di numeri di Tile specifici nell'Unità precedente.
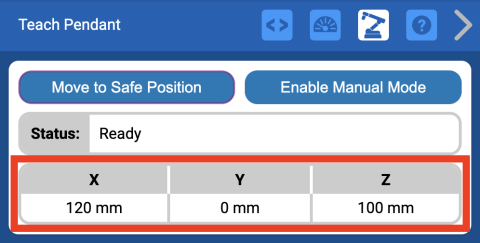
La Dashboard rimarrà sempre nella parte superiore del Teach Pendant, anche mentre si scorre per utilizzare altre funzionalità del Teach Pendant, come mostrato in questo video.
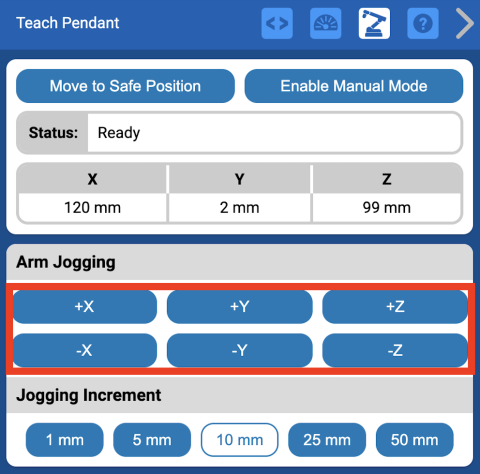
Correre con le braccia
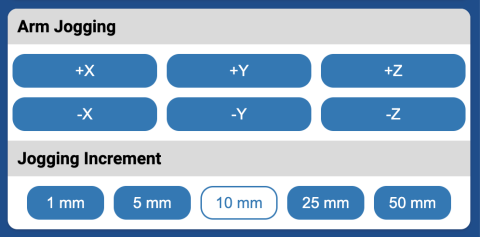
Il Teach Pendant consente di spostare il braccio a 6 assi lungo gli assi x, y e z con piccoli incrementi. Questo si chiama jogging.
È anche possibile modificare l'incremento del movimento durante il jogging.
Più avanti in questa lezione imparerai di più sul jogging.
Magnete
Il Teach Pendant è dotato anche di pulsanti che possono essere utilizzati per attivare e disattivare il magnete.
Nella Lezione 2 di questa Unità utilizzerai questi pulsanti per raccogliere e spostare i dischi con il braccio a 6 assi.

Spostamento del braccio a 6 assi tramite il Teach Pendant
Il jogging può essere utilizzato per spostare gradualmente il braccio a 6 assi da una posizione all'altra. Questa funzione è utile quando si desidera modificare leggermente la posizione del braccio a 6 assi. Ciò consente di posizionare il braccio a 6 assi in modo più preciso.
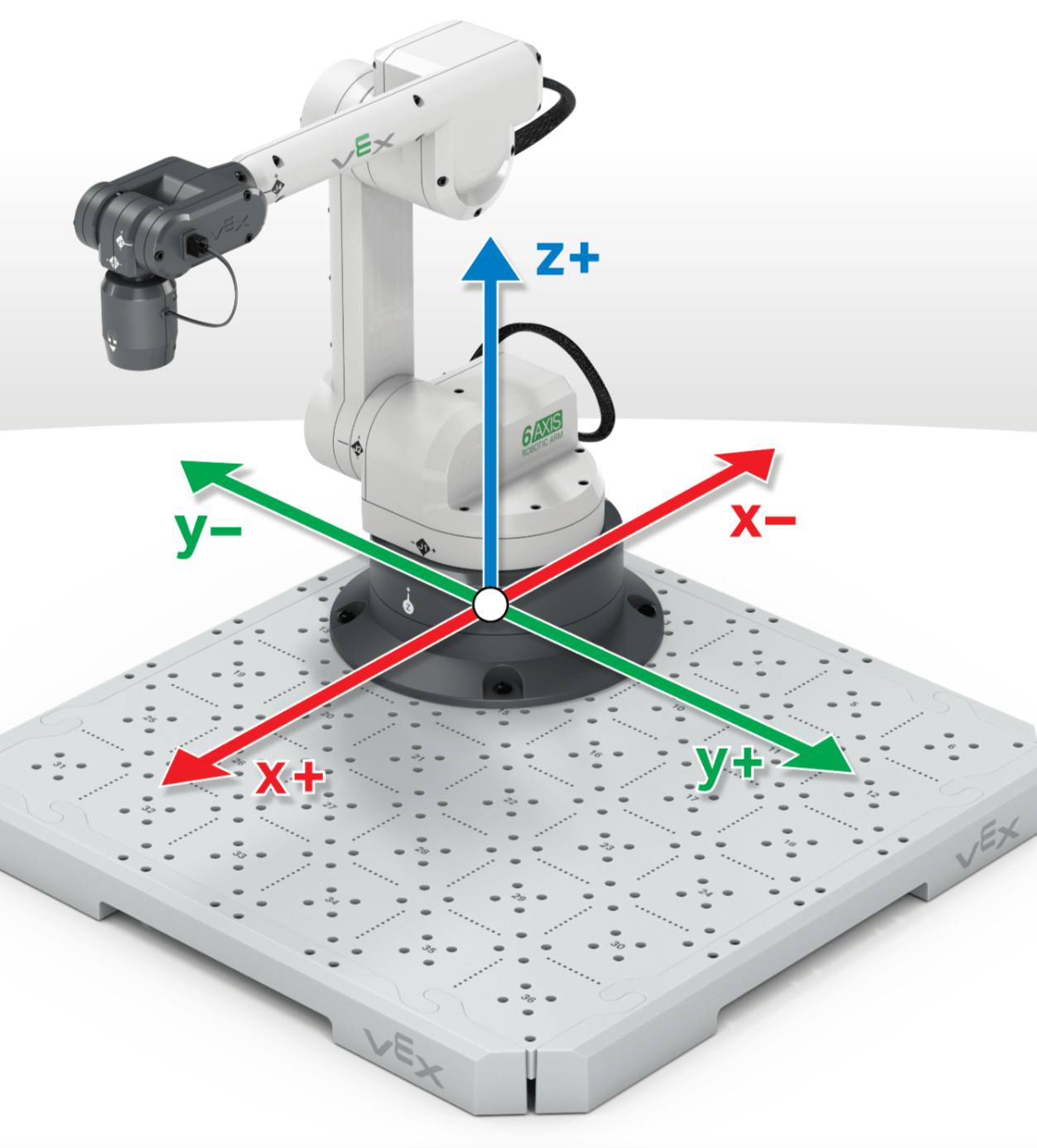
È possibile spostare il braccio a 6 assi lungo uno dei tre assi selezionando i pulsanti degli assi associati dal Teach Pendant. Guarda questo video per vedere un esempio del movimento del braccio a 6 assi con il Teach Pendant. Nel video vengono premuti i pulsanti positivo e negativo per ciascun asse. Il braccio a 6 assi si allontana dalla base quando vengono premuti i pulsanti positivi, per poi tornare verso la base quando vengono premuti i pulsanti negativi su ciascun asse.
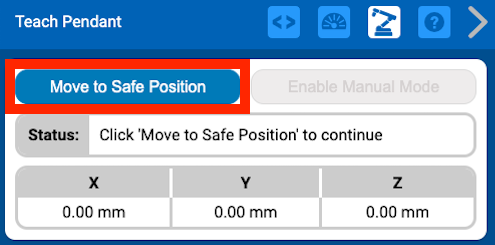
Selezionare Sposta in posizione sicura per abilitare la funzione di jogging del Teach Pendant.
Il Teach Pendant sarà disabilitato finché non verrà selezionato Sposta in posizione sicura .
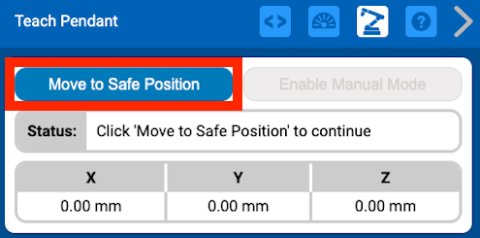
È possibile utilizzare i pulsanti di spostamento del braccio per spostare il braccio a 6 assi in modo incrementale lungo l'asse x, y o z.
Più avanti in questa lezione ti eserciterai a muovere il braccio a 6 assi.
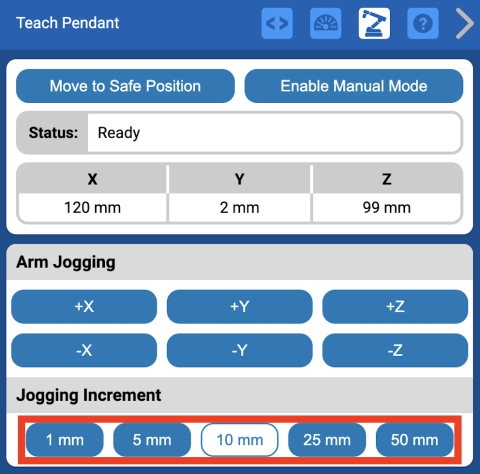
È possibile modificare l'incremento di avanzamento per aumentare o diminuire ogni movimento incrementale con cui viene eseguito l'avanzamento del braccio a 6 assi.
L'incremento predefinito è 10 millimetri (mm).
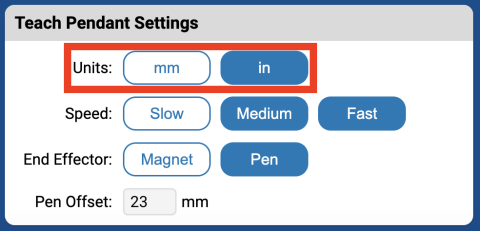
È anche possibile modificare le unità visualizzate nel Teach Pendant da millimetri (mm) a pollici (in), nella sezione Impostazioni Teach Pendant. Le impostazioni del Teach Pendant si trovano nella parte inferiore del Teach Pendant.
In questo modo vengono modificate le unità di coordinate nel pannello di controllo del Teach Pendant
e le opzioni di incremento di avanzamento.
Esercitati a far correre il braccio a 6 assi
Ora che sai cos'è il jogging, ti eserciterai a fare jogging con il braccio a 6 assi.
Assicurarsi che il braccio a 6 assi sia collegato al VEXcode e che il Teach Pendant sia aperto.
Selezionare Sposta in posizione sicura per abilitare il Teach Pendant.
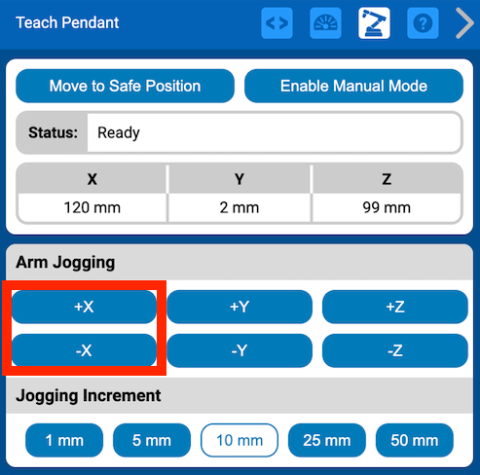
Per prima cosa, esercitatevi a fare jogging lungo l'asse x. Selezionare i pulsanti – X e + X nel Teach Pendant. Osserva come si muove il braccio a 6 assi ogni volta che si preme il pulsante.
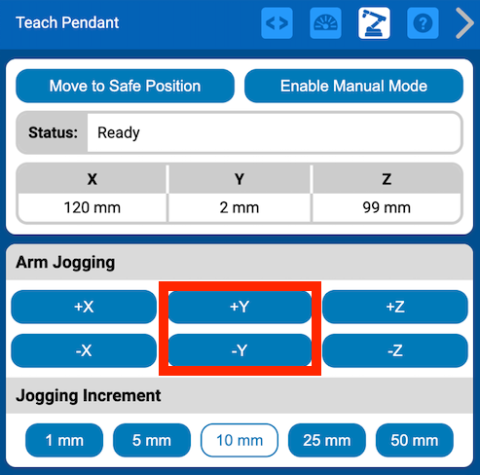
Quindi, esercitarsi a muoversi lungo l'asse y. Selezionare i pulsanti – Y e + Y nel Teach Pendant. Osserva come si muove il braccio a 6 assi ogni volta che si preme il pulsante.
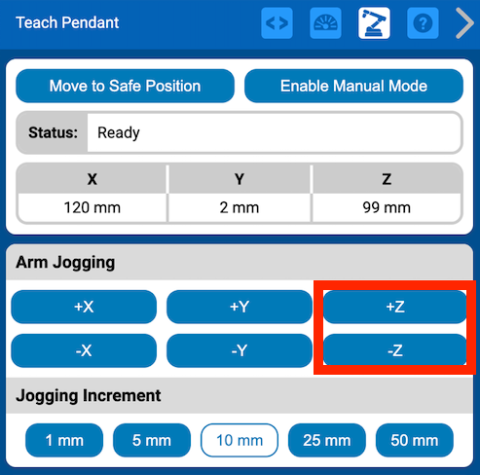
Ora, esercitatevi a fare jogging lungo l'asse z. Selezionate i pulsanti – Z e + Z nel Teach Pendant. Osserva come si muove il braccio a 6 assi ogni volta che si preme il pulsante.
Attività
Ora che hai imparato come muovere il braccio a 6 assi, ti eserciterai a muoverti lungo gli assi x, y e z.
In questa attività, ti eserciterai a muovere il braccio a 6 assi lungo ciascun asse. Muovendo il braccio a 6 assi, si registrerà la variazione dei valori x, y e z nel pannello di controllo del Teach Pendant.
Prima di provare a muovere il braccio a 6 assi, assicurarsi che il braccio a 6 assi sia collegato a VEXcode EXP e che sia selezionato Sposta in posizione sicura.
Segui ogni passaggio e registra le tue risposte alle domande sul tuo quaderno di ingegneria:
Asse X:
- Posizionare il braccio a 6 assi con il punto centrale dell'utensile (TCP) sopra il numero 32 sulla piastrella.
- Spostarlo finché il TCP non si trova sopra il numero 20, facendo scorrere il braccio a 6 assi.
- Riportare il braccio a 6 assi al numero 32.
- Rispondi alla seguente domanda sul tuo quaderno di ingegneria: Come cambia il valore x nel pannello di controllo del Teach Pendant quando si muove il braccio a 6 assi?
Asse Y:
- Posizionare il braccio a 6 assi con il punto centrale dell'utensile (TCP) sopra il numero 12 sulla piastrella.
- Spostarlo finché il TCP non si trova sopra il numero 10 facendo scorrere il braccio a 6 assi.
- Riportare il braccio a 6 assi al numero 12.
- Rispondi alla seguente domanda sul tuo quaderno di ingegneria: Come cambia il valore y nel pannello di controllo del Teach Pendant quando si muove il braccio a 6 assi?
Asse Z:
- Posizionare il braccio a 6 assi con il punto centrale dell'utensile (TCP) sopra il numero 29 sulla piastrella.
- Spostarlo verso l'alto in modo che il TCP si trovi a circa 70 mm dalla piastrella, muovendo il braccio a 6 assi.
- Riportare il braccio a 6 assi nella sua posizione originale approssimativa, sopra il numero 29.
- Rispondi alla seguente domanda sul tuo quaderno di ingegneria: Come cambia il valore z nel pannello di controllo del Teach Pendant quando si muove il braccio a 6 assi?
Controlla la tua comprensione
Prima di iniziare la lezione successiva, assicurati di aver compreso i concetti di questa lezione rispondendo alle domande nel documento seguente sul tuo quaderno di progettazione.
Domande di verifica della comprensione > (Google Doc / .docx / .pdf)
Seleziona Avanti > per saperne di più sugli effettori terminali.