
Les 1: Introductie tot de Teach Pendant
In de vorige eenheid hebt u onderzocht hoe u de 6-assige robotarm handmatig langs de x-, y- en z-as kunt bewegen. Je hebt geleerd hoe je de Teach Pendant in VEXcode EXP gebruikt om handmatige verplaatsing mogelijk te maken en (x, y, z)-coördinaten te verzamelen.
In deze les leert u meer over de Teach Pendant, waaronder:
- Hoe teach pendants worden gebruikt in industriële robotica.
- Belangrijkste kenmerken van de Teach Pendant in VEXcode EXP.
- Hoe u de 6-assige arm kunt besturen met behulp van de Teach Pendant.
Aan het einde van deze les kunt u de Teach Pendant gebruiken om de 6-assige arm stapsgewijs langs de x-, y- en z-as te bewegen.
De Teach Pendant in VEXcode EXP
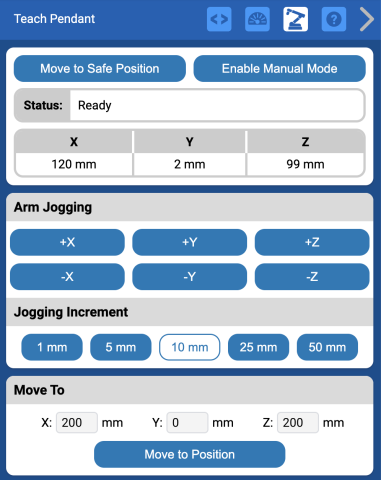
De Teach Pendant in VEXcode EXP beschikt over vele handige functies waarmee u de 6-assige arm kunt bedienen. In deze les ligt de nadruk op de functies die u in deze module zult gebruiken.
Wat is een teach pendant?
Een teach pendant is een veelgebruikt apparaat in de industriële robotica waarmee een gebruiker een robotarm op afstand en handmatig kan bedienen. Met Teach Pendants kunt u een serie bewegingen uitvoeren en deze testen en verfijnen, zodat ze nauwkeuriger zijn. Hiermee kan een gebruiker de robot in realtime in de gaten houden, problemen oplossen zodra deze zich voordoen en een belangrijke rol spelen in de veiligheid door de gebruiker de mogelijkheid te bieden om op afstand met de robot te werken.

Teach Pendant Dashboard
De x, y, z-coördinaten van de 6-assige arm zijn in realtime te zien op het Teach Pendant Dashboard. Deze functie heb je gebruikt bij het verzamelen van coördinaten van specifieke tegelnummers in de vorige eenheid.
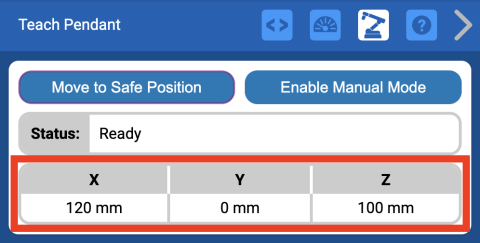
Het Dashboard blijft te allen tijde bovenaan de Teach Pendant staan, zelfs wanneer u scrolt om andere functies van de Teach Pendant te gebruiken, zoals u in deze video kunt zien.
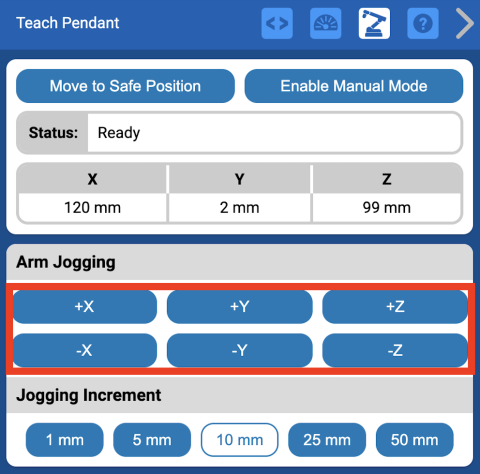
Arm Joggen
Met de Teach Pendant kunt u de 6-assige arm in kleine stapjes langs de x-, y- en z-as bewegen. Dit heet joggen.
Ook de mate van beweging tijdens het joggen kun je aanpassen.
Later in deze les leert u meer over joggen.
Magneet
De Teach Pendant is ook voorzien van knoppen waarmee de magneet kan worden geactiveerd en gedeactiveerd.
In Les 2 van deze module gebruikt u deze knoppen om schijven op te pakken en te verplaatsen met de 6-assige arm.

Joggen met de 6-assige arm met behulp van de Teach Pendant
Door te joggen kunt u de 6-assige arm stapsgewijs van de ene naar de andere positie bewegen. Dit is handig als u de positie van de 6-assige arm enigszins wilt wijzigen. Hiermee kunt u de 6-assige arm nauwkeuriger positioneren.
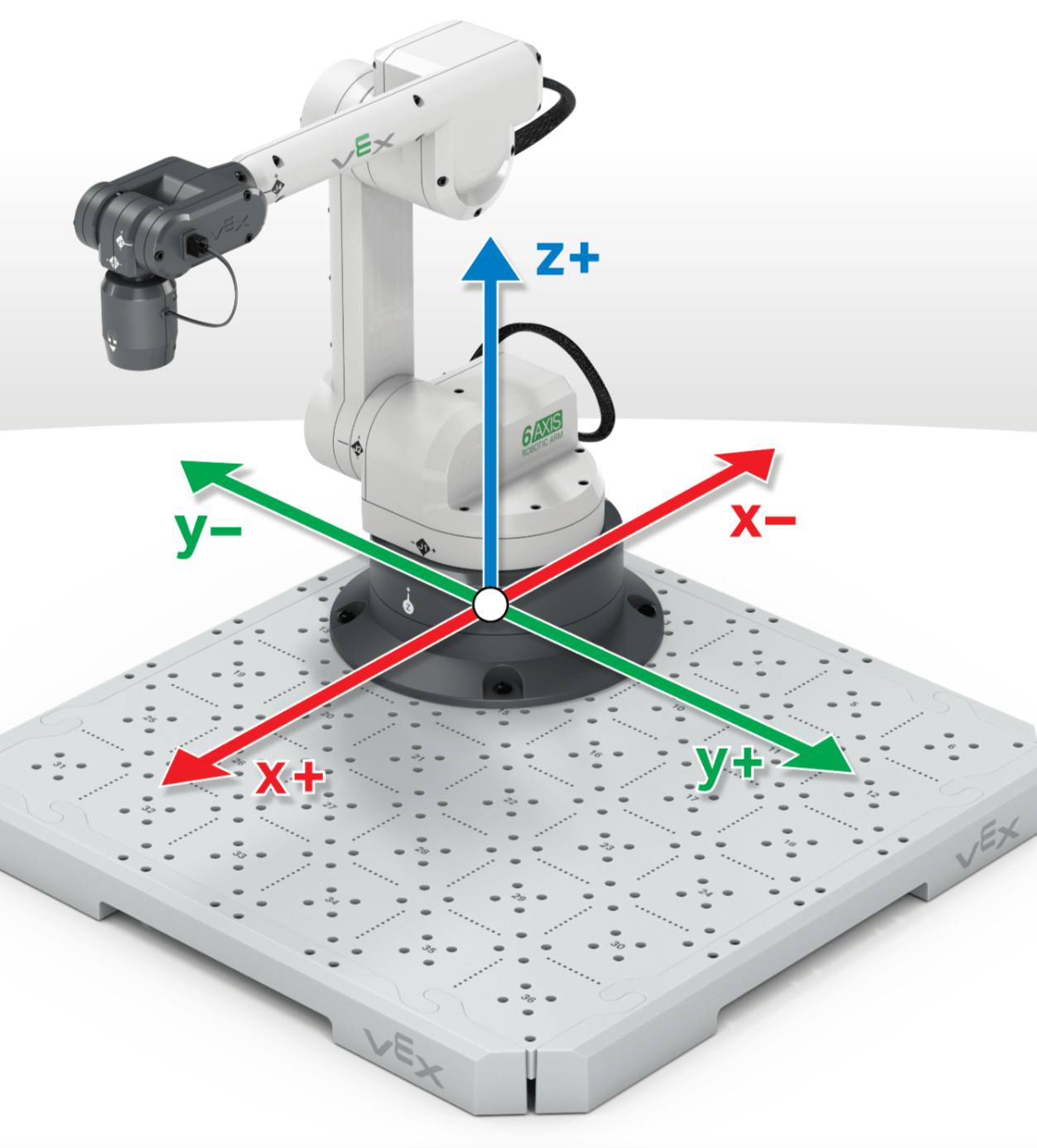
U kunt de 6-assige arm langs een van de drie assen bewegen door de bijbehorende asknoppen op de Teach Pendant te selecteren. Bekijk deze video voor een voorbeeld van de 6-assige arm die aangestuurd wordt door de Teach Pendant. In de video worden de positieve en negatieve knoppen voor elke as ingedrukt. De 6-assige arm beweegt weg van de basis wanneer de positieve knoppen worden ingedrukt, en vervolgens weer terug naar de basis wanneer de negatieve knoppen op elke as worden ingedrukt.
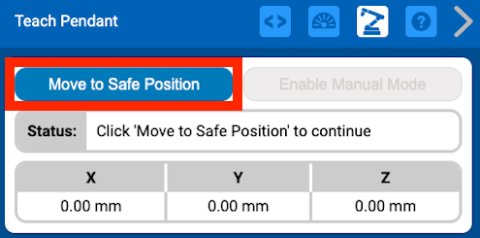
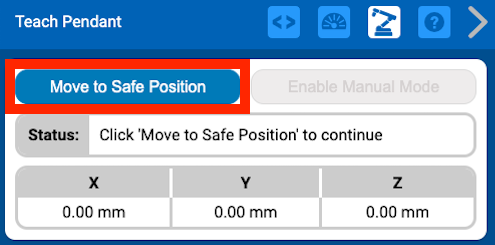
SelecteerVerplaats naar veilige positieom de joggingfunctie van de Teach Pendant in te schakelen.
De Teach Pendant is uitgeschakeld totdatMove to Safe Positionis geselecteerd.
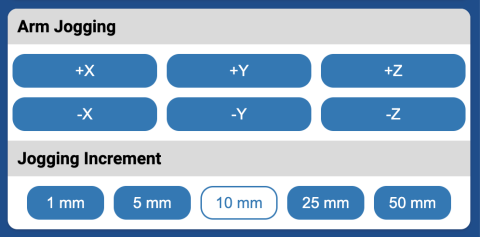
Met de Arm Jogging-knoppen kunt u de 6-assige arm stapsgewijs langs de x-, y- of z-as bewegen.
Later in deze les ga je oefenen met het joggen van de 6-assige arm.
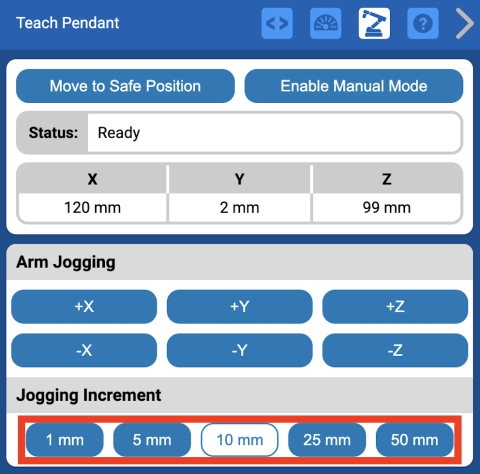
U kunt de Jogging Increment wijzigen om elke stapsgewijze beweging waarmee de 6-assige arm wordt gejogd te vergroten of te verkleinen.
De standaardverhoging is 10 millimeter (mm).
U kunt de eenheden die in de Teach Pendant worden weergegeven, ook wijzigen van millimeters (mm) naar inches (in) in het gedeelte Instellingen Teach Pendant. De instellingen voor de Teach Pendant bevinden zich aan de onderkant van de Teach Pendant.
Hiermee worden de coördinaateenheden in het Teach Pendant Dashboard en de opties voor Jogging Increment gewijzigd.

Oefen met joggen met de 6-assige arm
Nu u weet wat joggen is, gaat u zelf joggen met de 6-assige arm.
Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode en dat de Teach Pendant open is.
SelecteerVerplaats naar veilige positieom de Teach Pendant in te schakelen.
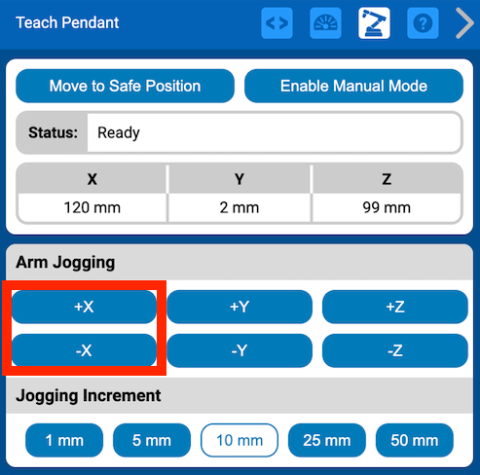
Oefen eerst het joggen langs de x-as. Selecteer de knoppen – X en + X in de Teach Pendant. Observeer hoe de 6-assige arm beweegt telkens wanneer u op de knop drukt.
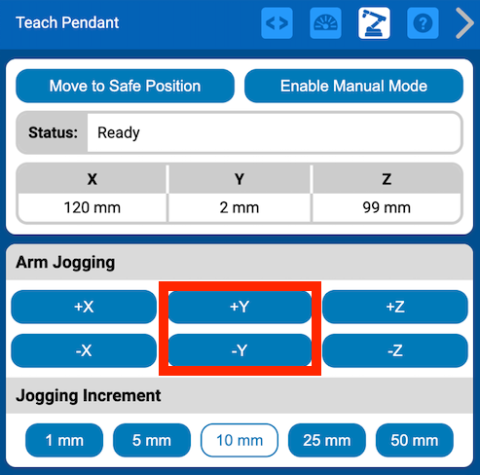
Oefen vervolgens het joggen langs de y-as. Selecteer de knoppen – Y en + Y op de Teach Pendant. Observeer hoe de 6-assige arm beweegt telkens wanneer u op de knop drukt.
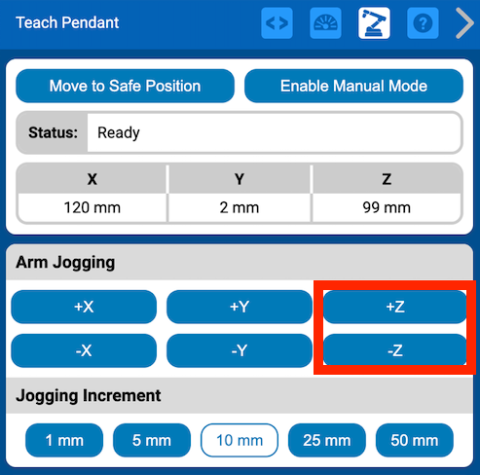
Oefen nu het joggen langs de z-as. Selecteer de knoppen – Z en + Z op de Teach Pendant. Observeer hoe de 6-assige arm beweegt telkens wanneer u op de knop drukt.
Activiteit
Nu u hebt geleerd hoe u de 6-assige arm kunt joggen, gaat u oefenen met joggen langs de x-, y- en z-as.
Bij deze activiteit oefent u het joggen van de 6-assige arm langs elke as. Terwijl u de 6-assige arm beweegt, registreert u hoe de x-, y- en z-waarden veranderen in het Teach Pendant Dashboard.
Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode EXP en datMove to Safe Position is geselecteerd voordat u de 6-assige arm probeert te bewegen.
Volg elke stap en noteer uw antwoorden op de vragen in uw technisch notitieboekje:
X-as:
- Plaats de 6-assige arm met het Tool Center Point (TCP) boven nummer 32 op de tegel.
- Verplaats het totdat de TCP zich boven het getal 20 bevindt door de 6-assige arm te bewegen.
- Beweeg de 6-assige arm terug naar nummer 32.
- Beantwoord de volgende vraag in je technische notitieboekje: Hoe verandert de x-waarde op het Teach Pendant Dashboard als je de 6-assige arm beweegt?
Y-as:
- Plaats de 6-assige arm met het Tool Center Point (TCP) boven nummer 12 op de tegel.
- Verplaats het totdat de TCP zich boven het getal 10 bevindt door de 6-assige arm te bewegen.
- Beweeg de 6-assige arm terug naar nummer 12.
- Beantwoord de volgende vraag in je technische notitieboekje: Hoe verandert de y-waarde op het Teach Pendant Dashboard als je de 6-assige arm beweegt?
Z-as:
- Plaats de 6-assige arm met het Tool Center Point (TCP) boven nummer 29 op de tegel.
- Verplaats het omhoog zodat de TCP zich ongeveer 70 mm van de tegel bevindt door de 6-assige arm te bewegen.
- Beweeg de 6-assige arm terug naar de oorspronkelijke positie over nummer 29.
- Beantwoord de volgende vraag in je technische notitieboekje: Hoe verandert de z-waarde op het Teach Pendant Dashboard als je de 6-assige arm beweegt?
Controleer uw begrip
Voordat u met de volgende les begint, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om meer te weten te komen over eind-effectoren.