
Leçon 1 : Introduction au Teach Pendant
Dans l’unité précédente, vous avez exploré le déplacement manuel du bras robotique à 6 axes le long des axes x, y et z. Vous avez appris à utiliser le pendentif d'enseignement dans VEXcode EXP pour activer le mouvement manuel et collecter les coordonnées (x, y, z).
Dans cette leçon, vous en apprendrez davantage sur le pendentif d'enseignement, notamment :
- Comment les pendentifs d'enseignement sont utilisés dans la robotique industrielle.
- Principales fonctionnalités du Teach Pendant dans VEXcode EXP.
- Comment déplacer le bras à 6 axes à l'aide du pendentif d'apprentissage.
À la fin de cette leçon, vous serez en mesure d’utiliser le pendentif d’enseignement pour déplacer le bras à 6 axes de manière incrémentielle le long des axes x, y et z.
Le pendentif d'enseignement dans VEXcode EXP
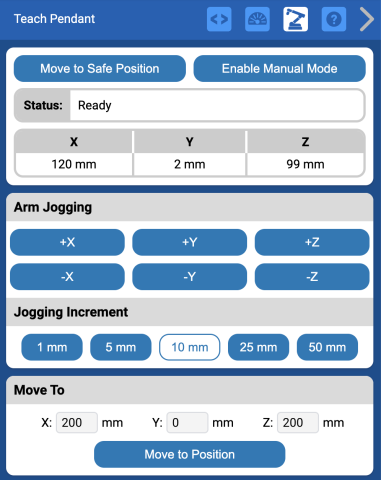
Le pendentif d'apprentissage de VEXcode EXP possède de nombreuses fonctionnalités utiles que vous pouvez utiliser pour contrôler le bras à 6 axes. Cette leçon se concentrera sur les fonctionnalités que vous utiliserez dans cette unité.
Qu'est-ce qu'un pendentif d'enseignement ?
Un pendentif d'apprentissage est un dispositif couramment utilisé en robotique industrielle qui permet à un utilisateur de contrôler un bras robotique à distance et manuellement. Les pendentifs d'enseignement peuvent être utilisés pour exécuter une série de mouvements et pour les tester et les affiner afin qu'ils soient précis. Il permet à l’utilisateur de surveiller le robot en temps réel, de résoudre les problèmes au fur et à mesure qu’ils surviennent et de jouer un rôle de sécurité crucial en permettant à l’utilisateur de travailler avec le robot à distance.

Tableau de bord du pendentif d'enseignement
Les coordonnées x, y, z du bras à 6 axes peuvent être vues en temps réel sur le tableau de bord du Teach Pendant. Vous avez utilisé cette fonctionnalité lors de la collecte des coordonnées de numéros de tuiles spécifiques dans l'unité précédente.
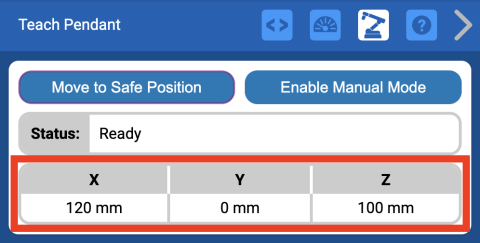
Le tableau de bord restera en place en haut du pendentif d'enseignement à tout moment, même lors du défilement pour utiliser d'autres fonctionnalités du pendentif d'enseignement, comme indiqué dans cette vidéo.
Jogging avec les bras
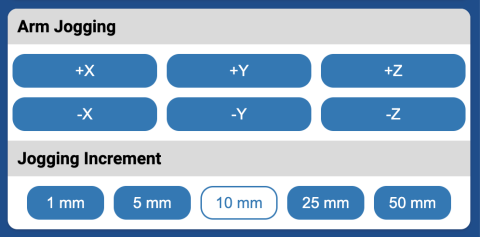
Le pendentif d'enseignement vous permet de déplacer le bras à 6 axes le long des axes x, y et z par petits incréments. Cela s'appelle faire du jogging.
Vous pouvez également modifier l’incrément du mouvement lorsque vous faites du jogging.
Vous en apprendrez davantage sur le jogging plus tard dans cette leçon.
Aimant
Le pendentif d'enseignement fournit également des boutons qui peuvent être utilisés pour activer et désactiver l'aimant.
Vous utiliserez ces boutons dans la leçon 2 de cette unité pour ramasser et déplacer des disques avec le bras à 6 axes.

Faire avancer le bras à 6 axes à l'aide du boîtier de commande Teach
Le jogging peut être utilisé pour déplacer progressivement le bras à 6 axes d'une position à une autre. Ceci est utile lorsque vous souhaitez modifier légèrement la position du bras à 6 axes. Cela peut vous permettre de positionner le bras à 6 axes avec plus de .
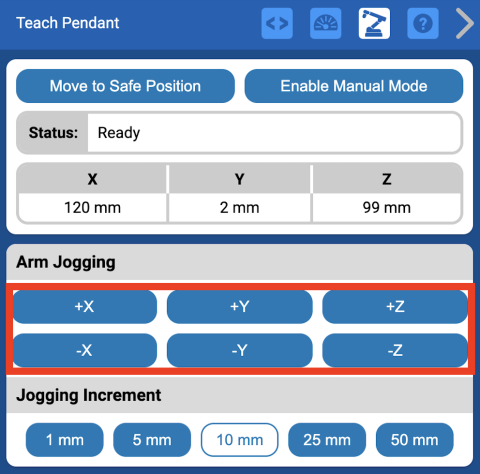
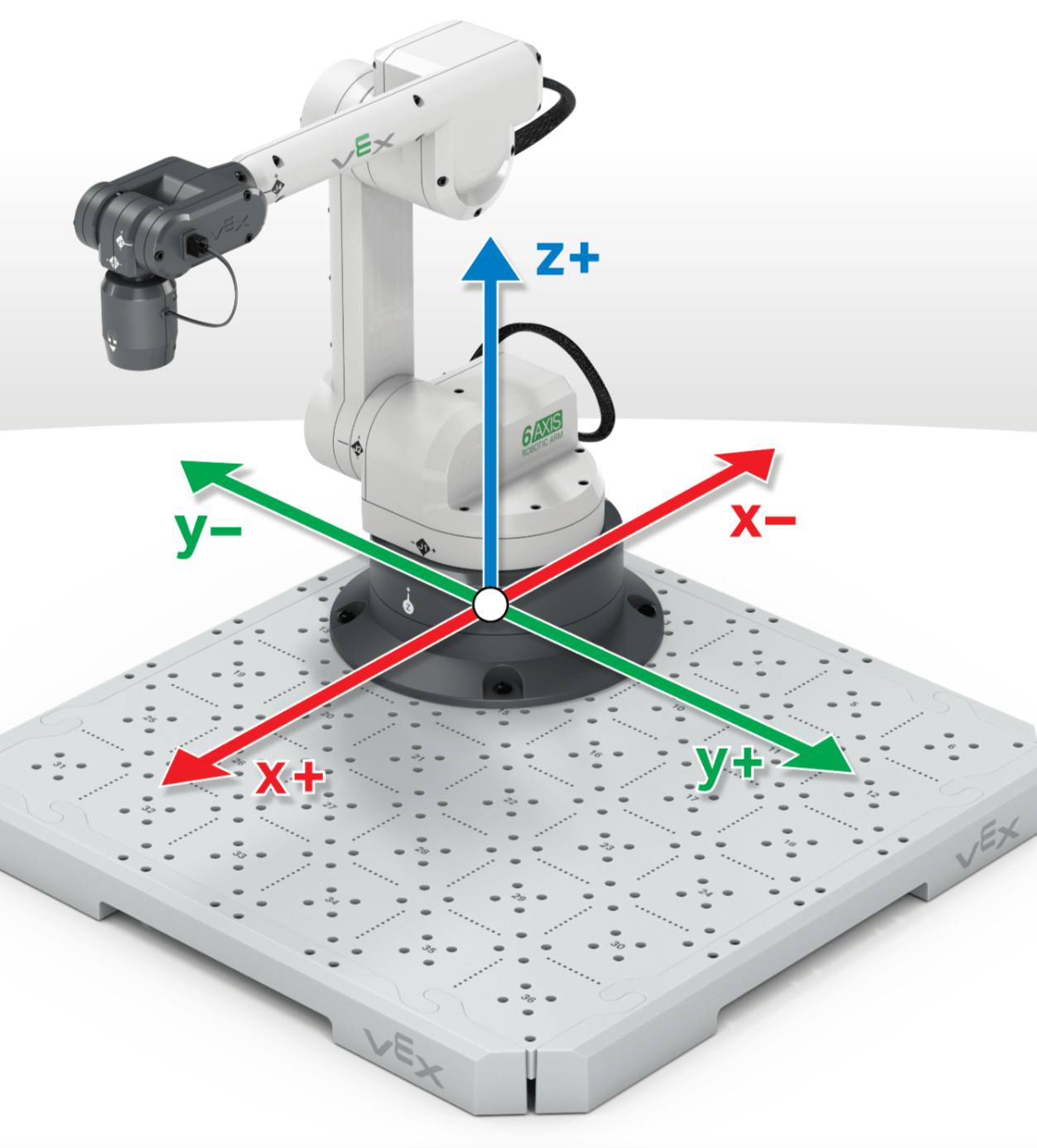
Vous pouvez déplacer le bras à 6 axes le long de l'un des trois axes en sélectionnant les boutons d'axe associés à partir du pendentif d'apprentissage. Regardez cette vidéo pour voir un exemple de jogging du bras à 6 axes avec le pendentif d'apprentissage. Dans la vidéo, les boutons positifs et négatifs de chaque axe sont enfoncés. Le bras à 6 axes s'éloigne de la base lorsque les boutons positifs sont enfoncés, puis revient vers la base lorsque les boutons négatifs sont enfoncés sur chaque axe.
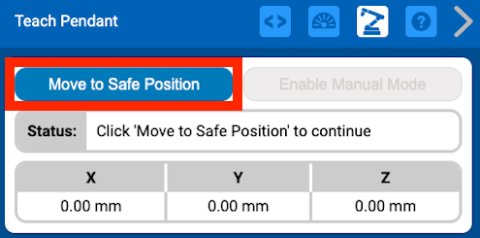
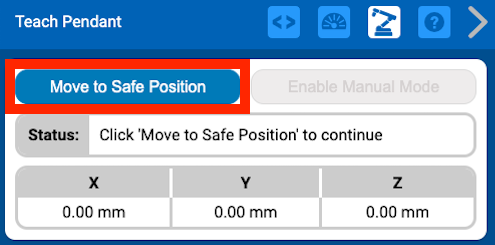
Sélectionnez Déplacer vers la position de sécurité pour activer la fonction de jogging du pendentif d'apprentissage.
Le pendentif d'enseignement sera désactivé jusqu'à ce que Déplacer vers la position sûre soit sélectionné.
Vous pouvez utiliser les boutons de déplacement du bras pour déplacer le bras à 6 axes de manière incrémentielle le long des axes x, y ou .
Vous pratiquerez le jogging avec le bras à 6 axes plus tard dans cette leçon.
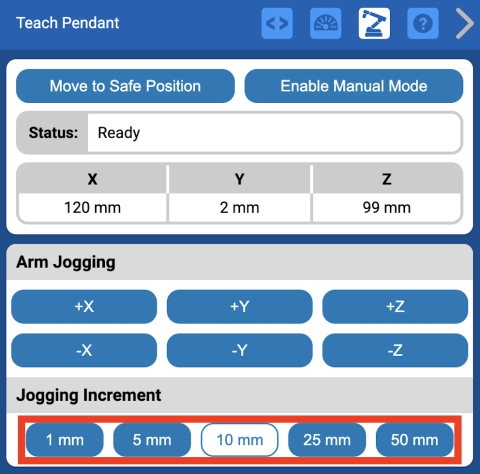
Vous pouvez modifier l'incrément de jogging pour augmenter ou diminuer chaque mouvement incrémentiel avec lequel le bras à 6 axes est déplacé.
L'incrément par défaut est de 10 millimètres (mm).
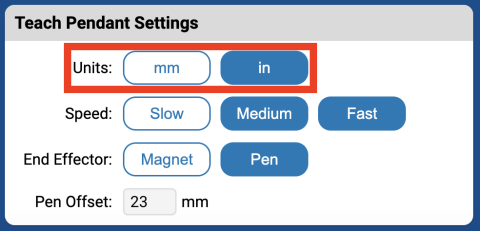
Vous pouvez également modifier les unités affichées dans le pendentif d'enseignement de millimètres (mm) à pouces (po), dans la section Paramètres du pendentif d'enseignement. Les paramètres du pendentif d'enseignement sont situés au bas du pendentif d'enseignement.
Cela modifie les unités de coordonnées dans le tableau de bord du pendentif
d'enseignement ainsi que
les options d'incrément de jogging.
Entraînez-vous à faire du jogging avec le bras à 6 axes
Maintenant que vous savez ce qu'est le jogging, vous allez vous entraîner à faire du jogging avec le bras à axes.
Assurez-vous que le bras à 6 axes est connecté à VEXcode et que le pendentif d'apprentissage est ouvert.
Sélectionnez Déplacer vers la position de sécurité pour activer le pendentif d'apprentissage.
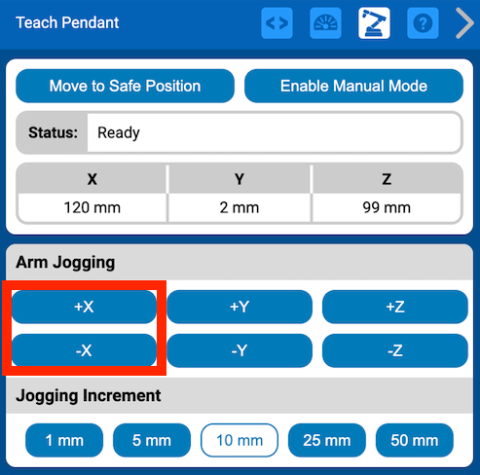
Tout d’abord, entraînez-vous à faire du jogging le long de l’axe des x. Sélectionnez les boutons – X et + X dans le pendentif d’enseignement. Observez comment le bras à 6 axes se déplace à chaque fois que le bouton est enfoncé.
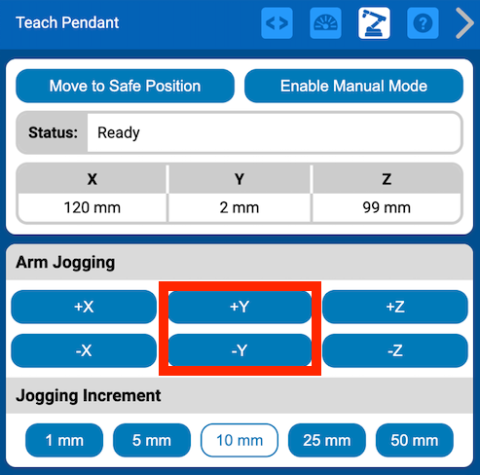
Ensuite, entraînez-vous à faire du jogging le long de l’axe y. Sélectionnez les boutons – Y et + Y dans le pendentif d’apprentissage. Observez comment le bras à 6 axes se déplace à chaque fois que le bouton est enfoncé.
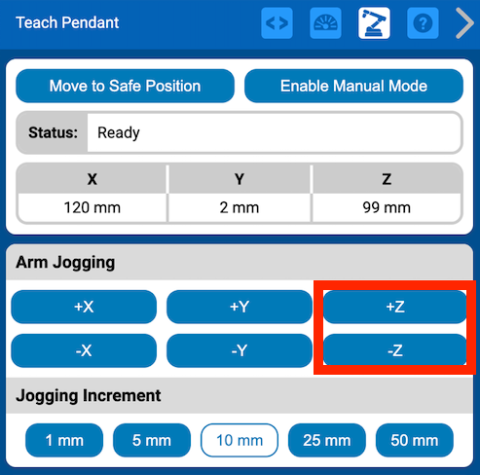
Entraînez-vous maintenant à faire du jogging le long de l’axe z. Sélectionnez les boutons – Z et + Z dans le pendentif d’apprentissage. Observez comment le bras à 6 axes se déplace à chaque fois que le bouton est enfoncé.
Activité
Maintenant que vous avez appris à déplacer le bras à 6 axes, vous allez vous entraîner à déplacer le long des axes x, y et z.
Dans cette activité, vous vous entraînerez à faire bouger le bras à 6 axes le long de chaque axe. Au fur et à mesure que vous déplacez le bras à 6 axes, vous enregistrez la manière dont les valeurs x, y et z changent dans le tableau de bord du pendentif d'apprentissage.
Assurez-vous que le bras à 6 axes est connecté à VEXcode EXP et que Déplacer vers la position de sécurité est sélectionné avant d'essayer de déplacer le bras à 6 axes.
Suivez chaque étape et enregistrez vos réponses aux questions dans votre cahier d'ingénierie :
Axe des X :
- Positionnez le bras à 6 axes avec le point central de l'outil (TCP) au-dessus du numéro 32 sur la tuile.
- Déplacez-le jusqu'à ce que le TCP soit positionné au-dessus du numéro 20 en déplaçant le bras à 6 axes.
- Déplacez le bras à 6 axes jusqu'au numéro 32.
- Répondez à la question suivante dans votre cahier d'ingénierie : Comment la valeur x change-t-elle dans le tableau de bord du Teach Pendant lorsque vous déplacez le bras à 6 axes ?
Axe Y :
- Positionnez le bras à 6 axes avec le point central de l'outil (TCP) au-dessus du numéro 12 sur la tuile.
- Déplacez-le jusqu'à ce que le TCP soit positionné au-dessus du numéro 10 en déplaçant le bras à 6 axes.
- Déplacez le bras à 6 axes jusqu'au numéro 12.
- Répondez à la question suivante dans votre cahier d'ingénierie : Comment la valeur y change-t-elle dans le tableau de bord du Teach Pendant lorsque vous déplacez le bras à 6 axes ?
Axe Z :
- Positionnez le bras à 6 axes avec le point central de l'outil (TCP) au-dessus du numéro 29 sur la tuile.
- Déplacez-le vers le haut de sorte que le TCP soit à environ 70 mm du carrelage en déplaçant le bras à 6 axes.
- Faites descendre le bras à 6 axes jusqu'à sa position d'origine approximative sur le numéro 29.
- Répondez à la question suivante dans votre cahier d'ingénierie : Comment la valeur z change-t-elle dans le tableau de bord du Teach Pendant lorsque vous déplacez le bras à 6 axes ?
Vérifiez votre compréhension
Avant de commencer la leçon suivante, assurez-vous de bien comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d’ingénierie.
Questions pour vérifier votre compréhension > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour en savoir plus sur les effecteurs finaux.