
Bermain
Bagian 1 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan membangun proyek dalam VEXcode 123 untuk menggerakkan Robot 123 hingga mendeteksi objek di area pendaratan Mars (Lapangan 123). Lihat animasi di bawah untuk melihat robot melaju hingga mencapai rintangan setelah proyek dimulai. Pastikan untuk menggunakan objek berwarna terang atau putih untuk mewakili "rintangan" di area pendaratan untuk memastikan Sensor Mata akan mendeteksi objek ini.
Berkas video
- ModelModel bagi siswa cara membangun dan menguji proyek dalam VEXcode 123.
- Mulailah dengan menunjukkan kepada siswa cara menghubungkan 123 Robot mereka ke perangkat mereka di VEXcode 123. Karena langkah-langkah koneksi bervariasi antara perangkat, lihat artikel Menghubungkan di VEXcode 123 VEX Library untuk langkah-langkah spesifik untuk menghubungkan Robot 123 ke komputer atau tablet Anda.
-
Seret blok [Drive until] ke ruang kerja dan tempelkan ke blok {When started}.

Tambahkan [Berkendara hingga] blok - Setelah siswa membuat proyeknya, mintalah mereka memberi nama proyek tersebut sebagai Drive Until 1 dan menyimpannya ke perangkat mereka. Lihat bagian Buka dan Simpan pada Pustaka VEX VEXcode 123 VEX untuk langkah-langkah khusus perangkat guna menyimpan proyek VEXcode 123.
- Model bagi siswa bagaimana menguji proyek mereka di Lapangan.
-
Pertama, tunjukkan pada mereka cara menempatkan Robot 123 di kotak dengan tanda "X".

123 Pengaturan Lapangan -
Pastikan Sensor Mata, yang terletak di bagian depan robot, menghadap rintangan.

Sensor Mata menghadapi rintangan
-
-
Setelah Robot 123 ditempatkan di Lapangan, minta siswa memilih 'Mulai' di VEXcode 123 untuk menguji proyek mereka.
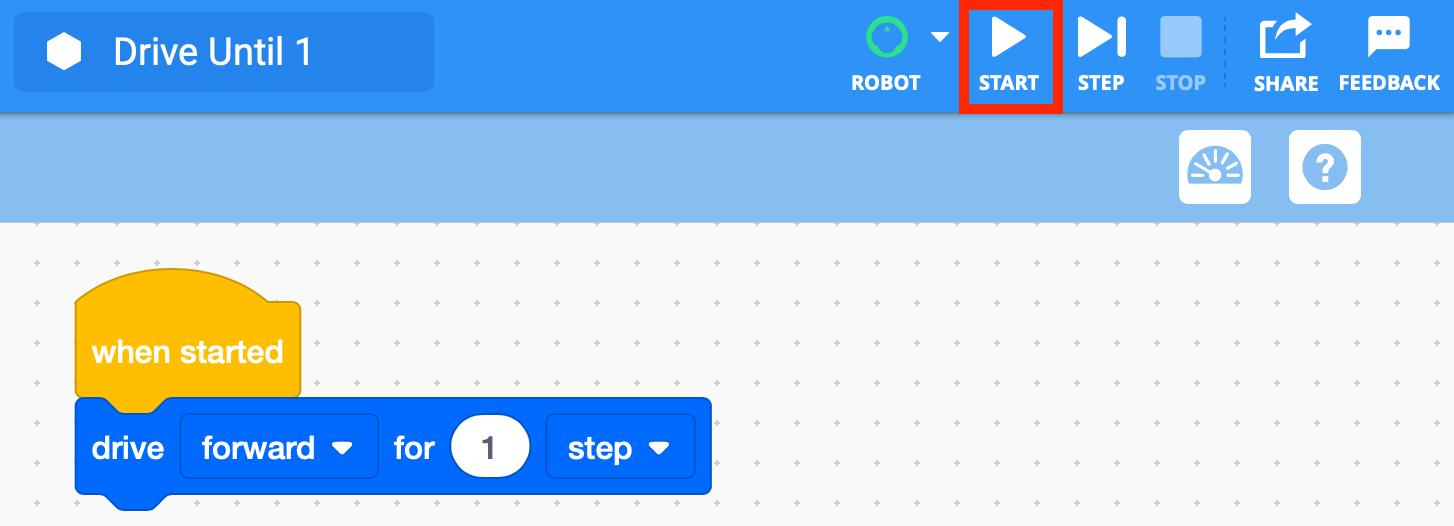
Pilih 'Mulai' untuk menguji proyek -
Setelah proyek selesai berjalan, siswa perlu memilih tombol “Stop” di Toolbar.

Pilih “Berhenti” - Untuk kelompok yang selesai lebih awal dan membutuhkan tantangan tambahan, mintalah mereka memindahkan rintangan ke lokasi baru dan menguji proyek mereka lagi.
- MemfasilitasiMemfasilitasi percakapan dengan siswa saat mereka menguji proyek mereka.
- Bagaimana Robot 123 bergerak dalam proyek ini? Bisakah Anda menunjukkannya dengan tangan Anda?
- Bagaimana Robot 123 tahu kapan harus berhenti?
- Bagaimana Anda tahu bila ada sesuatu di depan Anda?
- Jika Anda adalah Robot 123, indra manakah yang akan membantu Anda [Mengemudi hingga] suatu objek?
- IngatkanIngatkan siswa bahwa meskipun ini adalah proyek kecil, mereka mungkin membuat kesalahan dan mungkin butuh lebih dari satu kali percobaan agar proyek mereka berhasil. Untuk mendorong siswa agar mengakui kesalahan mereka, ajukan pertanyaan seperti:
- Kesalahan apa yang Anda buat yang mengajarkan Anda sesuatu?
- Bagian Lab mana yang membuat Anda berpikir keras?
- Apakah sulit untuk menyelaraskan robot penjelajah 123 sehingga Sensor Mata menghadap objek? Strategi apa yang Anda gunakan untuk menyelaraskannya?
- TanyaMinta siswa untuk menyebutkan atau mendeskripsikan perangkat atau objek yang menurut mereka menggunakan sensor mata. Tanyakan apakah mereka pernah mendengar tentang robot penyedot debu? Dapatkah mereka menjelaskan bagaimana perintah "Drive until" dapat bekerja dengan perangkat ini?
Istirahat Tengah Bermain & Diskusi Kelompok
Segera setelah setiap kelompok selesai menguji proyek mereka, berkumpul untuk percakapan singkat.
- Proyeksikan layar Anda sehingga semua siswa dapat melihat kode tersebut, atau bawa siswa ke area pusat tempat mereka semua dapat melihat kode tersebut di tablet atau komputer Anda.
- Mulailah proyek Drive Until 1 dan minta siswa untuk mengamati kode saat proyek berjalan dan jelaskan apa yang mereka lihat. Arahkan siswa untuk menjelaskan apa yang terjadi dengan fitur sorotan, dan identifikasi bahwa fitur tersebut tetap berada di blok [Berkendara hingga] hingga Sensor Mata mendeteksi suatu objek.
- Bagaimana sorotan hijau bergerak saat kita memulai proyek kita?
- Menurut Anda mengapa sorotan hijau berhenti di blok [Berkendara sampai]?
- Menurut Anda, apa yang sorotan ini sampaikan kepada kita?
Bagian 2 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan menambahkan ke proyek mereka sehingga Robot 123 memberi sinyal saat Sensor Mata mendeteksi adanya hambatan di area pendaratan Mars. Siswa akan menambahkan blok [Glow] dan [Wait] ke proyek mereka untuk menciptakan efek sinyal. Saat mereka menguji proyek mereka, mereka akan menghilangkan hambatan saat robot bersinar. Animasi di bawah menunjukkan bagaimana robot penjelajah 123 akan bergerak saat proyek dimulai. Setelah Robot 123 bersinar, siswa perlu menyingkirkan penghalang dari Lapangan 123. Hal ini juga ditunjukkan dalam animasi.
Berkas video
- ModelModel bagi siswa tentang cara membangun proyek VEXcode 123 yang sudah ada dan mengujinya di Lapangan.
- Jika siswa perlu membuka proyek Drive Until 1 mereka, modelkan langkah-langkah khusus perangkat, seperti yang ditunjukkan dalam artikel Perpustakaan VEX di bagian Buka dan Simpan.
-
Mintalah siswa menambahkan blok ke proyek VEXcode 123 mereka untuk membuat ulang kode pada gambar di bawah. Blok baru ini akan membuat Robot 123 bersinar hijau selama 2 detik sebagai sinyal bahwa ia mendeteksi adanya objek. Kotak merah menunjukkan blok baru yang perlu ditambahkan ke proyek.

Drive Until 2 proyek - Blok [Glow] yang diatur ke hijau akan membuat lampu indikator di tengah Robot 123 bersinar hijau.
- Blok [Tunggu] menunggu selama jangka waktu tertentu sebelum berpindah ke blok berikutnya.
- Blok [Glow] yang dimatikan akan menghentikan efek cahaya.
- Setelah siswa membuat proyeknya, mintalah mereka memberi nama proyek tersebut sebagai Drive Until 2 dan menyimpannya ke perangkat mereka. Lihat bagian Buka dan Simpan pada Pustaka VEX VEXcode 123 untuk langkah-langkah khusus perangkat guna menyimpan proyek VEXcode 123.
-
Ingatkan siswa cara menempatkan Robot 123 mereka di lapangan untuk menguji proyek mereka.

123 Pengaturan Lapangan - Pastikan Sensor Mata, yang terletak di bagian depan robot, menghadap rintangan.

- Pastikan Sensor Mata, yang terletak di bagian depan robot, menghadap rintangan.
-
Kemudian, pilih 'Mulai' di VEXcode 123 untuk menguji proyek mereka.

Pilih 'Mulai' untuk menguji proyek - Setelah Robot 123 melaju hingga mendeteksi rintangan, robot tersebut akan menyala hijau selama dua detik sebagai sinyal bahwa ia mendeteksi adanya objek. Siswa harus menyingkirkan objek tersebut saat Robot 123 menyala hijau.
-
Ingatkan siswa bahwa mereka perlu memilih tombol “Berhenti” di Toolbar setelah mereka menghapus objek tersebut.

Pilih “Berhenti” - Jika siswa selesai membangun dan menguji proyek mereka dengan cepat, mintalah mereka menambahkan [Putar suara] ke proyek mereka untuk memberi sinyal bahwa objek telah dipindahkan dari area pendaratan. Dorong mereka untuk bereksperimen dengan suara-suara berbeda yang dapat dibuat oleh Robot 123 dengan balok ini.
- MemfasilitasiMemfasilitasi siswa menguji proyek mereka dan bergiliran di Lapangan 123. Saat siswa menguji, ajukan pertanyaan kepada mereka tentang Sensor Mata dan bagaimana Robot 123 akan bergerak berdasarkan balok dalam proyek mereka.
- Bagaimana Robot 123 Anda akan memberi sinyal bahwa ia telah mendeteksi suatu objek?
- Seberapa jauh jarak Robot 123 dari rintangan saat berhenti melaju? Bisakah Anda menunjukkannya dengan tangan Anda?
- Blok apa dalam proyek kita yang memerintahkan Robot 123 untuk berhenti mengemudi?
- IngatkanIngatkan siswa bahwa mereka harus memeriksa proyek mereka dan membandingkannya dengan gambar proyek.
- Hal ini dapat dilakukan dalam kelompok —jika seorang siswa membuat proyek dalam VEXcode 123, pasangannya dapat memeriksa kode tersebut, sebelum menempatkan Robot 123 dan memulai proyek.
-
Atau, Anda dapat memasangkan kelompok untuk menjadikan ini kegiatan yang menyenangkan di mana kelompok dapat memeriksa proyek satu sama lain untuk memastikan semua blok mereka cocok. "Saya melihat blok [Berkendara sampai] di bawah blok {When started}" Apakah kelompok Anda juga memilikinya? Luar biasa!

Apakah kode Anda cocok?
- TanyakanTanyakan kepada siswa, bagaimana para ilmuwan menjelajahi tempat-tempat yang jauh?
Para ilmuwan dan insinyur merancang berbagai jenis robot untuk menjelajahi area yang terlalu jauh atau terlalu berbahaya untuk diselidiki manusia. Para ilmuwan merancang penjelajah untuk menjelajahi Mars, kapal selam tak berawak untuk menyelidiki lautan, dan bahkan menerbangkan drone ke gunung berapi aktif untuk mengumpulkan data!
- Bagaimana ilmuwan dapat membuat kode pada kapal selam untuk menggunakan sensor mata dengan perintah “berkendara sampai” untuk menjelajahi lautan?
- Bagaimana ilmuwan dapat menggunakan sensor mata pada drone untuk membantu menjelajahi gunung berapi? Perintah apa yang akan mereka gunakan untuk menerbangkan drone hingga mendekati dinding gunung berapi?
- Tugas apa lagi yang dapat dikodekan oleh ilmuwan agar dapat dilakukan oleh penjelajah Mars dengan perintah "berkendara sampai"?