
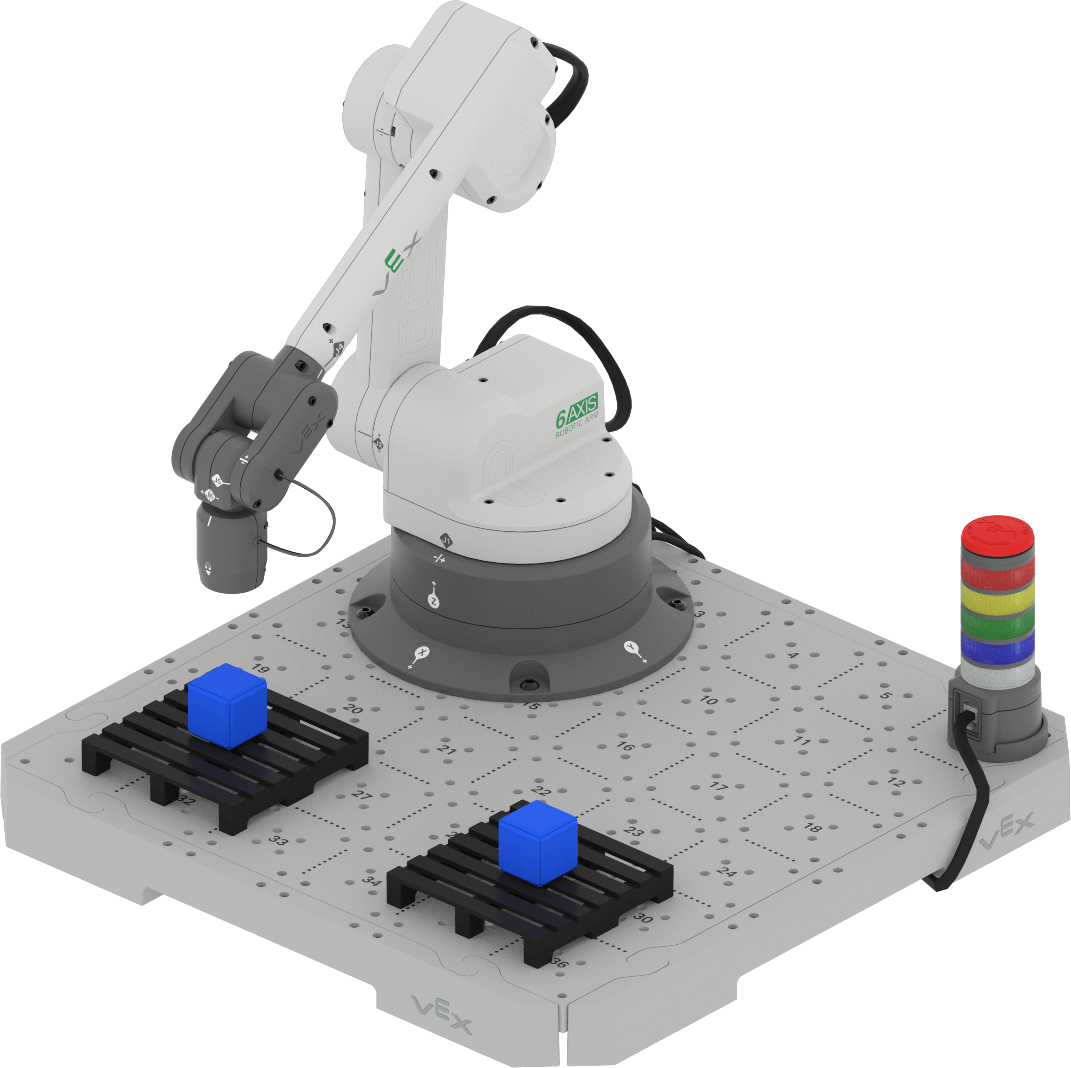
Dans la leçon précédente, vous avez appris sur les palettes et leur fonctionnement en conjonction avec des bras robotisés pour expédier des produits de manière organisée et efficace. Maintenant que vous savez ce qu'est une palette et comment elle fonctionne, il est temps d'apprendre à coder le bras à 6 axes pour ramasser et placer un objet sur une palette. Pour déplacer un cube, vous devrez utiliser l'outil de ramassage d'aimants.
Dans cette leçon, vous découvrirez :
- Utiliser le bloc d'aimant Set dans un projet pour ramasser et libérer un cube avec l'aimant.
- Recherche des coordonnées d'un Cube dans la zone de chargement et sur la palette.
- Codage du bras à 6 axes pour ramasser et placer un cube sur une palette.
À la fin de cette leçon, vous déplacerez un cube vers une autre palette, en appliquant vos connaissances sur le codage de l'aimant sur le bras à 6 axes.
Ramasser et placer un cube avec le bras à 6 axes
Dans une unité précédente, vous avez utilisé l'aimant sur le bras à 6 axes pour ramasser et déplacer des disques avec le pendentif d'enseignement. Dans cette leçon, vous vous baserez sur ce que vous avez appris pour coder le bras à 6 axes pour déplacer, engager l'aimant, ramasser un cube, le déplacer vers un nouvel emplacement et libérer l'aimant pour placer le cube sur une palette.
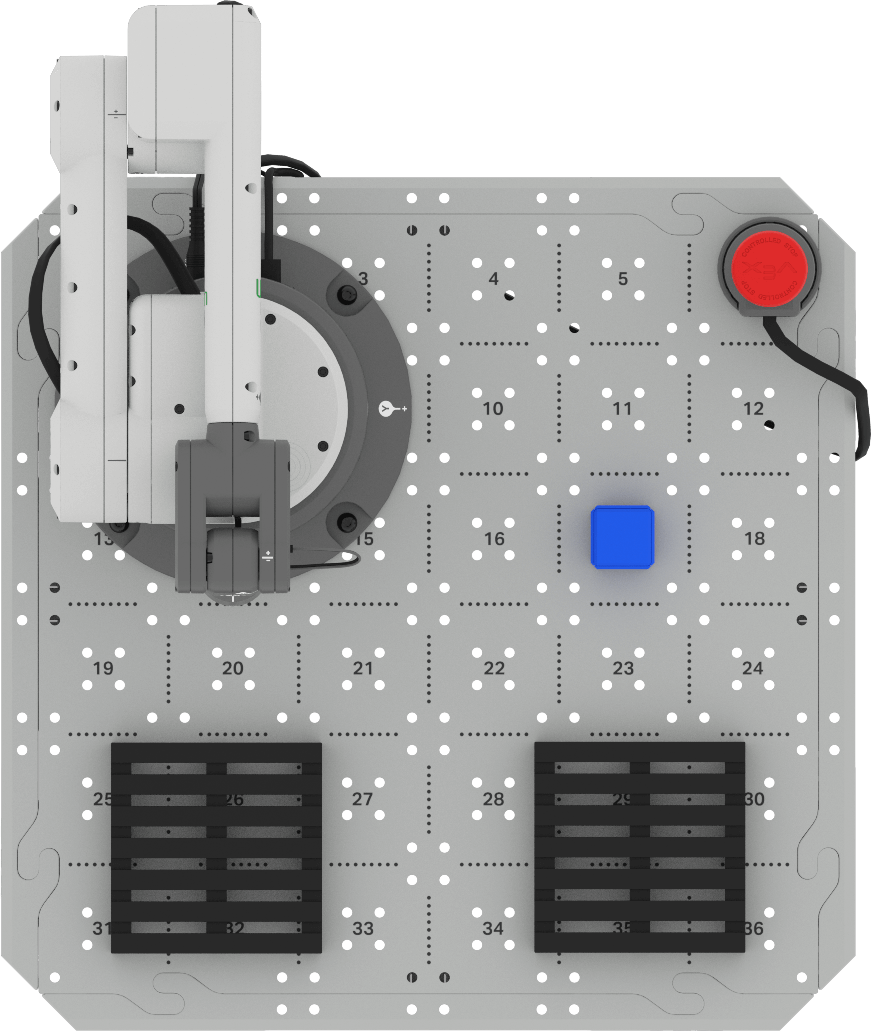
Pour commencer, placez un cube sur l'emplacement 17 de la tuile, comme indiqué dans cette image. Ce sera la zone de chargement du Cube. Documentez cette configuration dans votre bloc-notes d'ingénierie.
Rassemblez les coordonnées avec le moniteur
Avant de pouvoir coder le bras à 6 axes pour ramasser un cube, vous devez connaître l'emplacement des coordonnées du cube. Ces coordonnées peuvent être trouvées à l'aide du moniteur.
Assurez-vous que le bras à 6 axes est connecté à VEXcode.
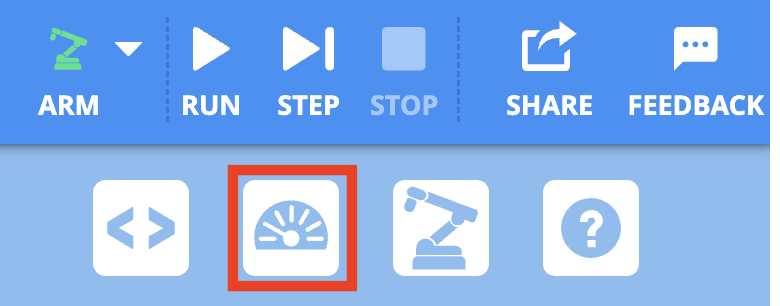
Sélectionnez l'icône Moniteur dans la barre d'outils pour ouvrir le moniteur.
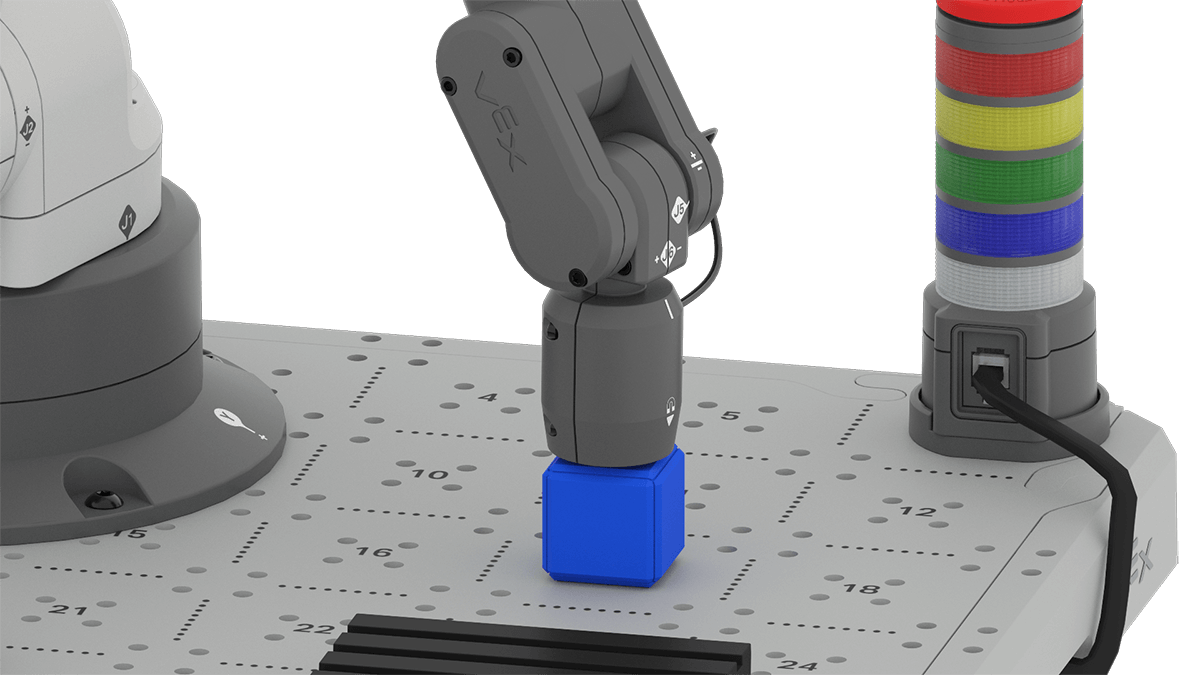
Déplacez manuellement le bras à 6 axes de sorte que l'aimant touche le haut du cube dans la zone de chargement.
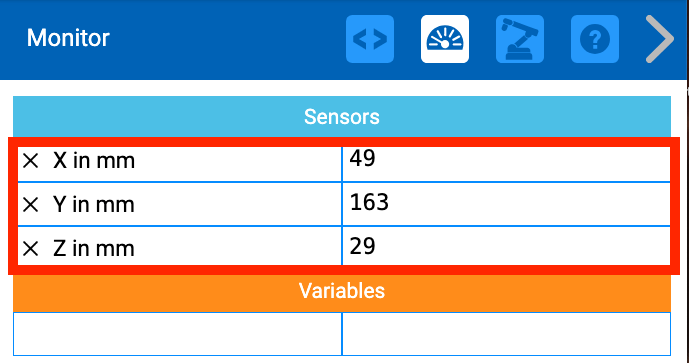
Enregistrez les coordonnées x, y et z de la console de surveillance dans votre bloc-notes d'ingénierie.
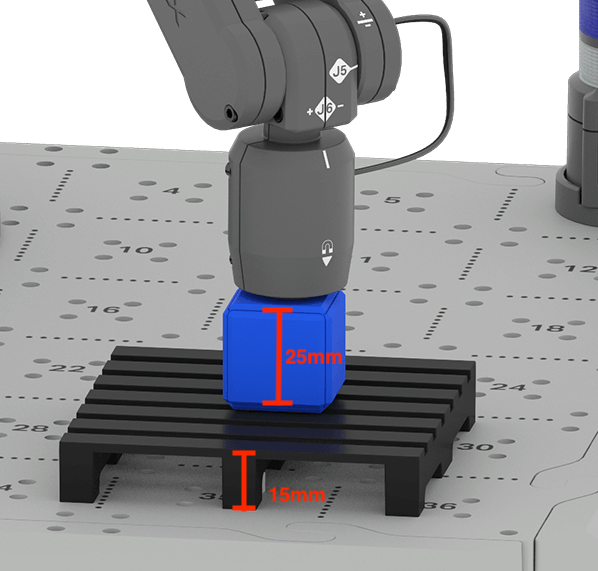
Décomposons les coordonnées (x, y, z) que nous venons de recueillir. Les valeurs x, y, z indiquent où se trouve le cube sur la tuile CTE. Vous avez utilisé les emplacements de coordonnées x et y pour déplacer le stylo afin de dessiner les unités précédentes. Cependant, dans ce cas, la valeur z était 0, car le stylo était plat à la surface de la tuile.
Afin de ramasser le Cube, nous avons besoin de l'Aimant pour toucher le haut du Cube. Cela signifie que nous devons savoir où se trouve le haut du Cube le long de l'axe z. Si nous ne tenons pas compte de la hauteur du cube lors du codage du bras à 6 axes, l'aimant ne saisira pas le cube efficacement.
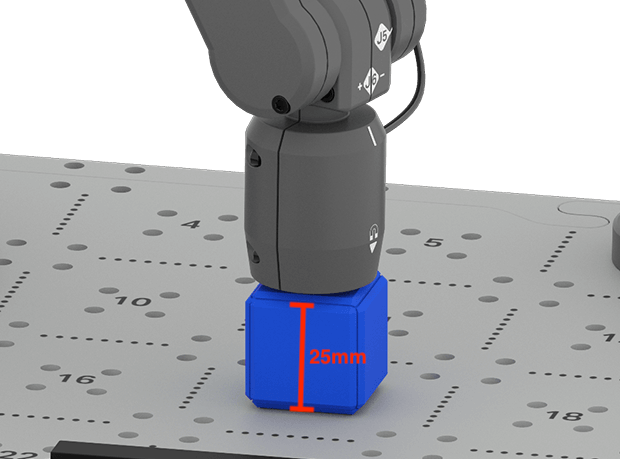
Le moniteur signale l'emplacement de l'extrémité de l'aimant, lorsqu'il touche le haut du cube. La valeur dans le moniteur peut ne pas être exactement la même que la hauteur du cube lorsque vous déplacez manuellement le bras à 6 axes. Avec un mouvement manuel, il peut y avoir une certaine variabilité des valeurs. Assurez-vous d'utiliser les valeurs que vous voyez dans le Moniteur dans vos projets.
Maintenant que nous savons où nous ramassons le Cube, nous devons trouver les coordonnées de l'endroit où nous allons placer le Cube.
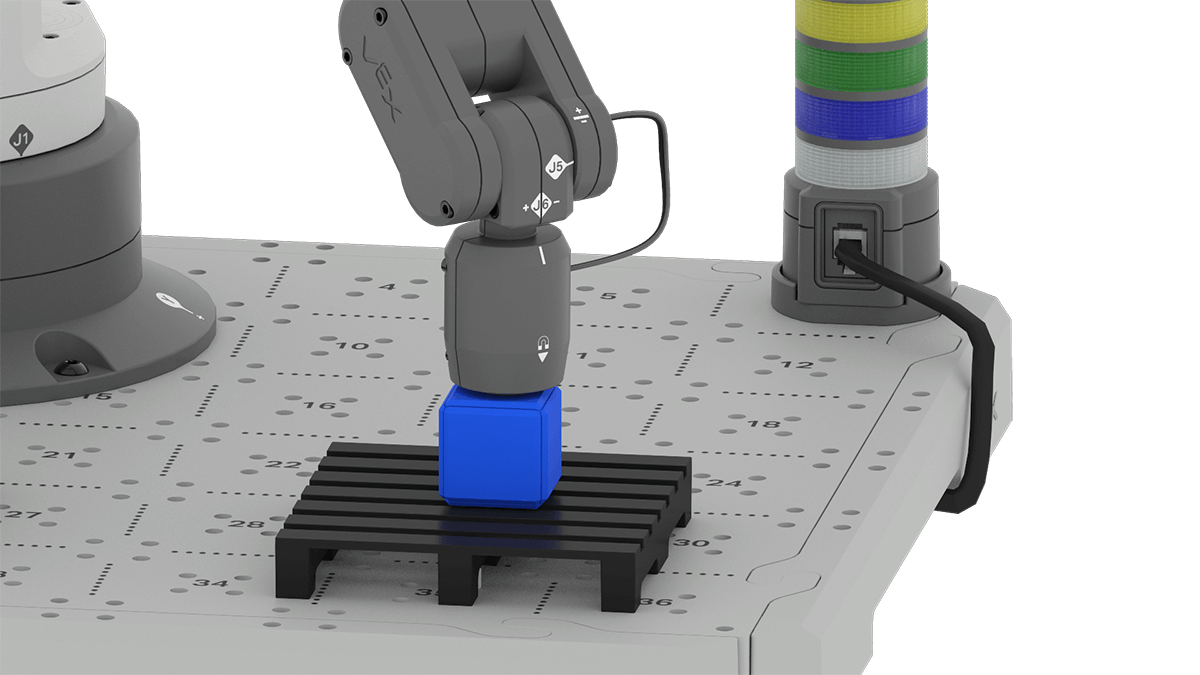
Placez le Cube au centre de la palette.
Déplacez manuellement le bras à 6 axes de sorte que l'aimant touche le haut du cube.
Regardez les valeurs x, y, z dans la console du moniteur.
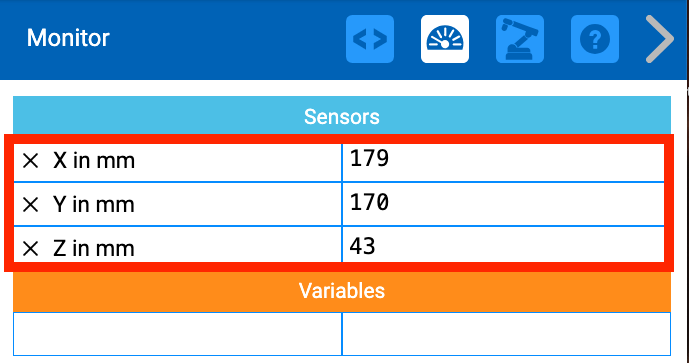
Enregistrez les coordonnées (x, y, z) du cube sur la palette dans votre cahier d'ingénierie. C'est le lieu de dépôt.
Notez que la valeur z dans la console du moniteur a changé. C'est parce que le Cube est maintenant au-dessus de la palette. Cela signifie que l'emplacement de l'aimant lorsque le cube est placé sur la palette est plus éloigné le long de l'axe z que lorsque le cube reposait sur la surface de la tuile.
Il est important de noter cette valeur z afin de pouvoir placer efficacement le Cube sur la palette de manière contrôlée. Encore une fois, la valeur z dans le moniteur peut être légèrement différente de ce que vous voyez dans cette image. Cela est dû à la variabilité lors du déplacement manuel du bras à 6 axes. Assurez-vous d'utiliser les valeurs que vous voyez dans le Moniteur dans votre projet.
Ramasser le cube dans la zone de chargement
Maintenant que nous savons où nous ramassons le Cube et où nous allons le déposer, nous pouvons commencer à coder le bras à 6 axes. Tout d'abord, le bras à 6 axes doit se déplacer vers le cube dans la zone de chargement. Ensuite, l'aimant sera engagé pour ramasser le cube.
Ouvrez un projet New Blocks en suivant les étapes de cette vidéo.
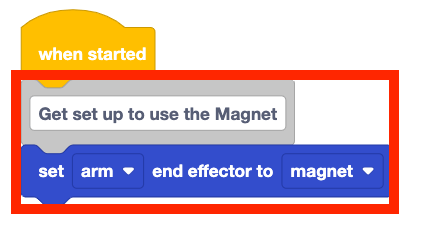
Ajoutez un bloc d'effecteur d'extrémité Set à votre projet et définissez le paramètre sur magnet.
N'oubliez pas que l'ajout de commentaires à votre projet au fur et à mesure que vous le construisez peut vous aider à rester organisé et à suivre plus facilement les comportements de votre projet.
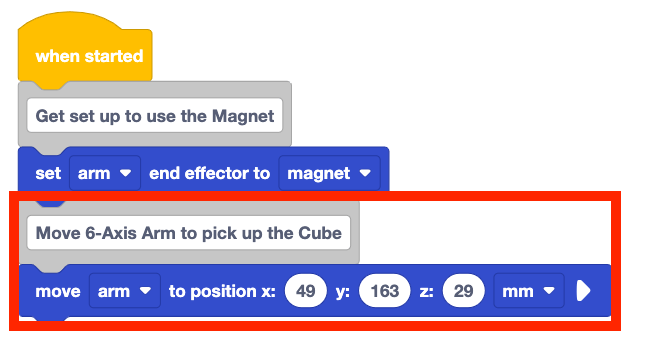
Ajoutez un bloc Déplacer vers la position au projet. Réglez les paramètres x, y, z sur les coordonnées de l'emplacement de la zone de chargement que vous avez enregistré dans votre carnet d'ingénierie.
Notez que les coordonnées (x, y, z) indiquées ici sont un exemple. La vôtre peut être légèrement différente en fonction de la position du cube et du bras à 6 axes lorsque vous avez collecté manuellement les valeurs. Assurez-vous d'utiliser vos coordonnées dans votre projet.
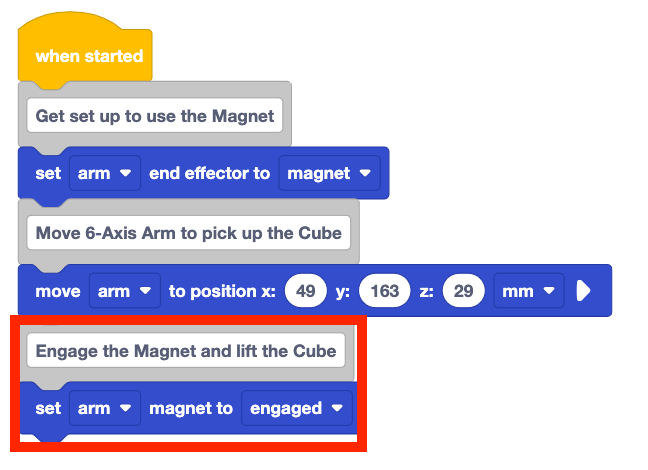
Ajoutez un bloc d'aimants Set au projet. Assurez-vous que le paramètre est défini sur engagé.
Vous devez utiliser un bloc d'aimant Set pour engager l'aimant afin d'attirer le cube pour le ramasser.
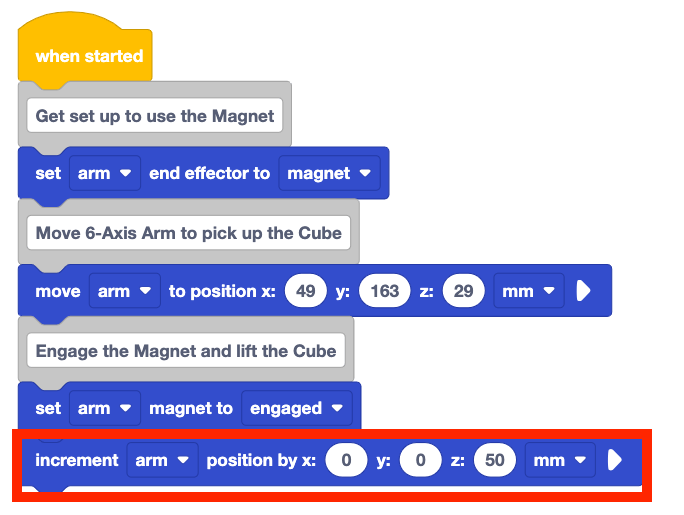
Ajoutez un bloc de position Incrément à votre projet et définissez le paramètre z sur 50.
Cela entraînera le bras à 6 axes à se soulever le long de l'axe z, ramassant le cube à partir de son emplacement de départ sur la tuile.
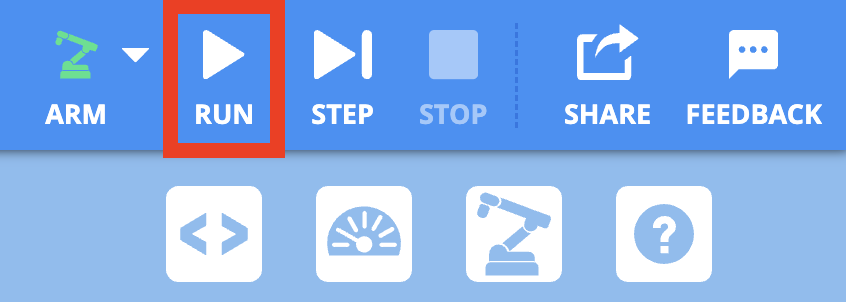
Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet et observez les comportements du bras à 6 axes.
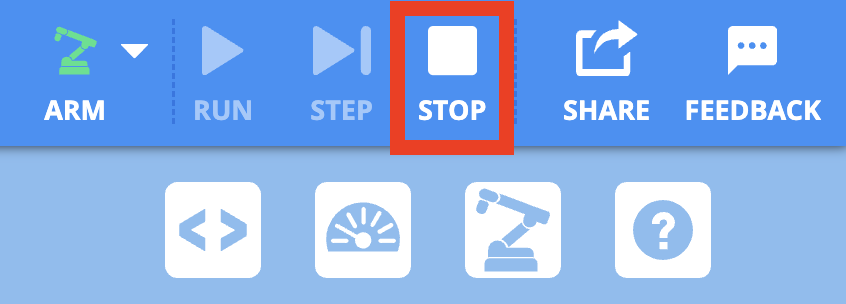
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Ramasse-t-il le Cube de la zone de chargement comme prévu ? Pourquoi ou pourquoi pas ?
Placez le cube sur la palette
Maintenant que le cube est ramassé par le bras à 6 axes, il peut être déplacé vers la palette. Tout d'abord, le bras à 6 axes déplacera le cube au-dessus de l'emplacement de dépôt sur la palette. Ensuite, il abaissera le cube sur la palette et relâchera l'aimant pour placer le cube.
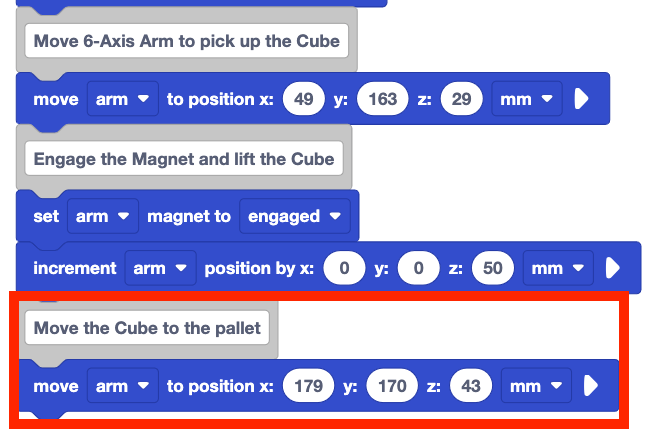
Ajoutez un bloc Déplacer vers la position au projet. Réglez les paramètres x, y, z sur les coordonnées du lieu de dépôt enregistrées dans votre carnet d'ingénierie.
Assurez-vous d'utiliser vos coordonnées, car celles indiquées ici sont un exemple et peuvent différer des vôtres.
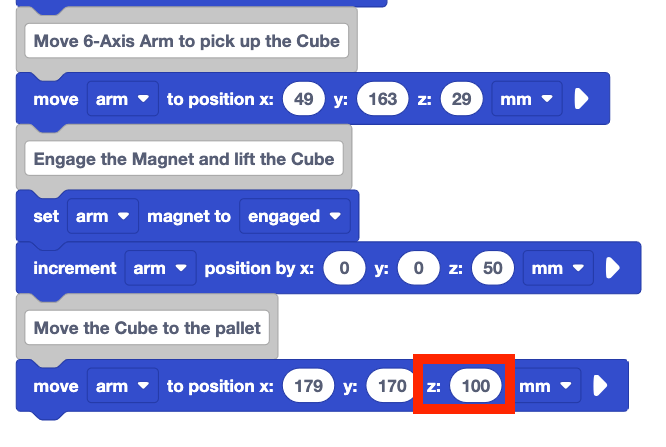
Ajoutez environ 50 à votre coordonnée z dans le bloc Déplacer en position.
Ceci est ajouté parce que le bras à 6 axes doit déplacer le cube au-dessus de l'emplacement de dépôt. En augmentant la coordonnée z, vous pouvez vous assurer que le Cube est positionné sur le bon emplacement. Cela garantit également que le bras évite tout obstacle qui pourrait être présent.
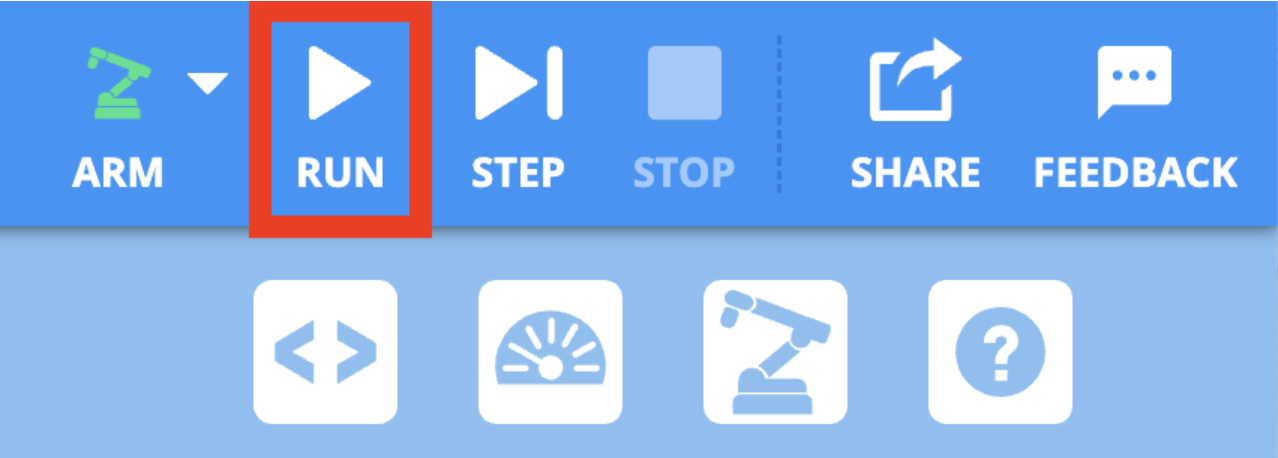
Assurez-vous que le bras à 6 axes est connecté à VEXcode et que le cube est placé dans la zone de chargement.
Exécutez le projet pour le tester. Où se trouve la position de fin du Cube lorsque le projet est exécuté ?
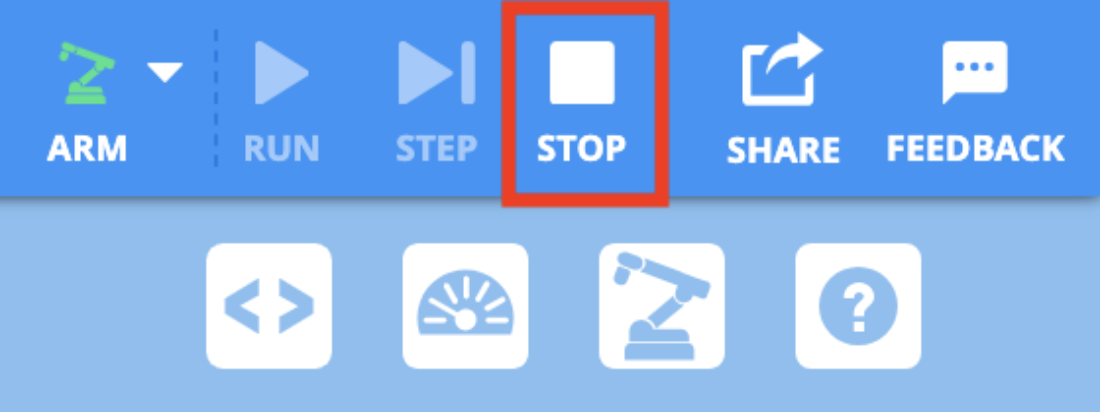
Arrêtez le projet. Enregistrez ce qui s'est passé lorsque le projet a été exécuté dans votre cahier d'ingénierie.
Vous devriez avoir observé le bras à 6 axes se déplacer vers le cube, le ramasser à l'aide de l'aimant et déplacer le cube directement au-dessus du centre de la palette. Ce mouvement garantit que votre aimant est directement au-dessus du bon endroit avant de descendre pour déposer le cube.
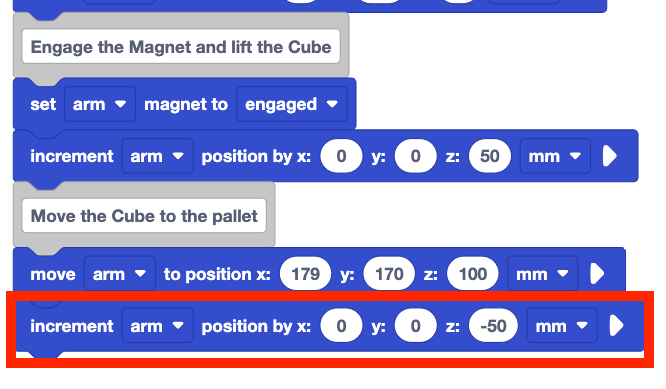
Ajoutez un bloc de position d' ncrément au projet. Réglez le paramètre z sur -50.
Cela déplacera le bras à 6 axes de 50 mm vers le bas pour placer le cube sur la palette.
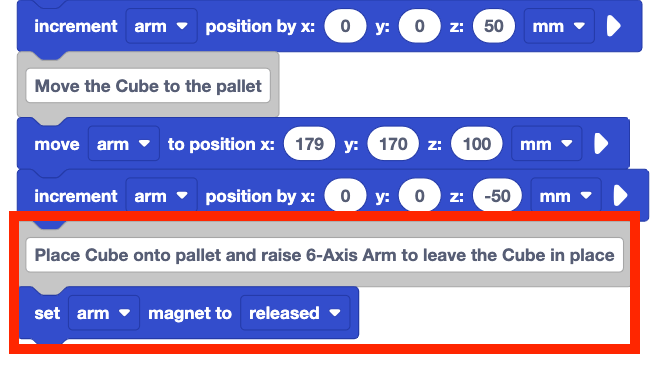
Ajoutez un bloc d'aimants Set au projet. Définissez le paramètre sur relâché.
Cela désengagera l'aimant afin que le cube soit libéré sur la palette.
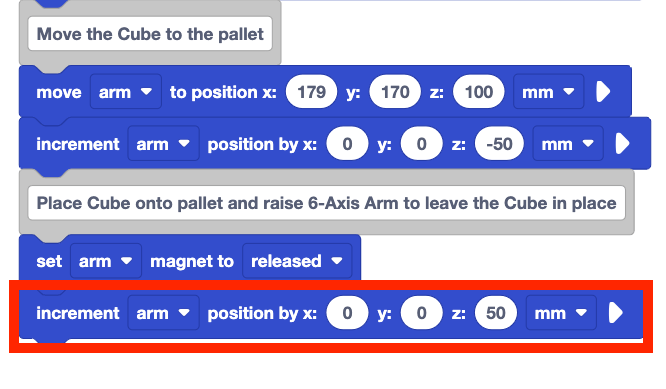
Ajoutez un bloc de position d' incrément au projet. Réglez le paramètre z sur 50.
Cela soulèvera le bras à 6 axes pour placer le cube sur la palette.
Assurez-vous que le bras à 6 axes est connecté à VEXcode et que le cube est placé dans la zone de chargement.
Exécutez le projet pour le tester. Observez les comportements du bras à 6 axes.
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Ramasse-t-il et place-t-il le Cube sur la palette comme prévu ? Pourquoi ou pourquoi pas ?
N'oubliez pas de renommer et d'enregistrer votre projet.
Maintenant que vous avez construit et testé le projet, vous devriez avoir vu les actions suivantes du bras à 6 axes :
- Déplacez-vous vers le cube dans la zone de chargement.
- Monter le long de l'axe z.
- Déplacez-vous vers le lieu de dépôt.
- Descendez le long de l'axe z.
- Lâchez le cube.
- Remontez le long de l'axe z pour vous assurer que le cube a été placé.
Fichier vidéo
Se déplacer le long de l'axe z avec les blocs de position Incrément est une partie importante du processus. Cela vous permet de vous assurer que l'aimant a ramassé le cube. Les mouvements de l'axe z vous permettent également de vous assurer que le positionnement du Cube au-dessus de la palette est correct. C'est similaire à un jeu de grue dans une salle d'arcade. Vous voulez déplacer la grue elle-même au-dessus du lieu de dépôt ou de ramassage avant de la déplacer directement vers le bas.
Les palettes quitteront rarement un entrepôt avec un seul colis chargé. Au fur et à mesure que vous continuez à construire des projets et à déplacer des cubes sur des palettes, vous devrez vous assurer que chaque placement est précis. De cette façon, vous pouvez livrer autant de colis (cubes) que possible à la destination finale. Vous explorerez le déplacement de plusieurs cubes sur les palettes dans la leçon 3 de cette unité.
Activité
Maintenant que vous avez déplacé un Cube de la zone de chargement vers la palette, vous allez pratiquer ces compétences. Dans cette activité, vous développerez votre projet à partir de cette leçon pour coder le bras à 6 axes afin de prendre un deuxième cube dans la zone de chargement et de le placer sur la deuxième palette.

Activité : Codez le bras à 6 axes pour placer un cube sur chaque palette.
- Planifiez comment vous allez construire sur votre projet pour coder le bras à 6 axes
pour ramasser un deuxième cube de la zone de chargement et le placer sur la deuxième
palette avec votre groupe. Assurez-vous que vous êtes tous d'accord sur votre approche
avant de commencer à modifier le projet.
- Documentez votre plan dans votre cahier d'ingénierie.
- Renommez et enregistrez votre projet en tant qu'activité de la leçon 2 de l' unité 7 avant de commencer à modifier le projet.
- Modifiez le projet dans VEXcode pour qu'il corresponde au plan convenu par votre groupe.
- Exécutez le projet pour le tester. Placez manuellement le deuxième cube dans la zone de chargement une fois que le premier cube a été placé.
- Le bras à 6 axes déplace-t-il avec succès les deux cubes comme prévu ? Il doit y avoir un cube sur chaque palette. Sinon, continuez à modifier le projet jusqu'à ce que vous ayez placé avec succès les deux cubes, un sur chaque palette.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions suivantes dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour passer à la réflexion du milieu de l'unité.