
ในบทเรียนก่อนหน้านี้คุณได้เรียนรู้เกี่ยวกับพาเลทและวิธีการทำงานร่วมกับแขนหุ่นยนต์เพื่อจัดส่งผลิตภัณฑ์อย่างเป็นระเบียบและมีประสิทธิภาพ ตอนนี้คุณรู้แล้วว่าพาเลทคืออะไรและทำงานอย่างไรถึงเวลาที่จะเรียนรู้วิธีเขียนรหัสแขน 6 แกนเพื่อหยิบและวางวัตถุลงบนพาเลท หากต้องการย้ายคิวบ์คุณจะต้องใช้เครื่องมือรับแม่เหล็ก
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับ:
- ใช้ บล็อก ตั้งค่าแม่เหล็กในโปรเจกต์เพื่อหยิบและปล่อยลูกบาศก์ด้วยแม่เหล็ก
- การหา พิกัดของลูกบาศก์ในโซนโหลดและบนพาเลท
- การเข้ารหัสแขน 6 แกนเพื่อหยิบและวางลูกบาศก์บนพาเลท
ในตอนท้ายของบทเรียนนี้คุณจะย้ายลูกบาศก์ไปยังพาเลทอื่นโดยใช้การเรียนรู้ของคุณเกี่ยวกับการเข้ารหัสแม่เหล็กบนแขน 6 แกน
การหยิบและวางลูกบาศก์ด้วยแขน 6 แกน
ในยูนิตก่อนหน้านี้คุณใช้แม่เหล็กบนแขน 6 แกนเพื่อหยิบและเคลื่อนย้ายดิสก์ด้วยจี้สอน ในบทเรียนนี้คุณจะต่อยอดจากสิ่งที่คุณได้เรียนรู้ในการเขียนรหัสแขน 6 แกนเพื่อเคลื่อนย้ายเชื่อมต่อแม่เหล็กหยิบลูกบาศก์ย้ายไปยังตำแหน่งใหม่และปล่อยแม่เหล็กเพื่อวางลูกบาศก์ลงบนพาเลท
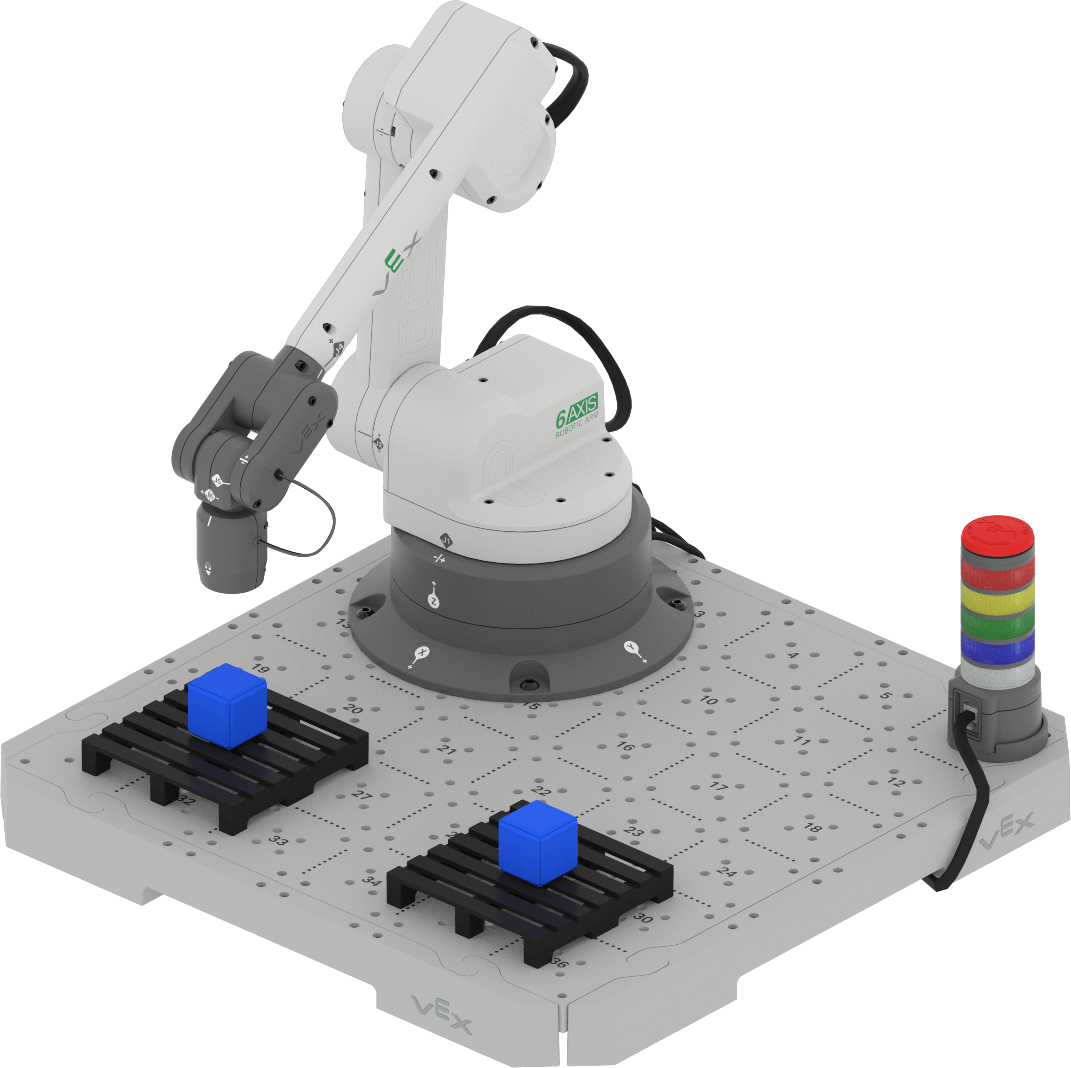
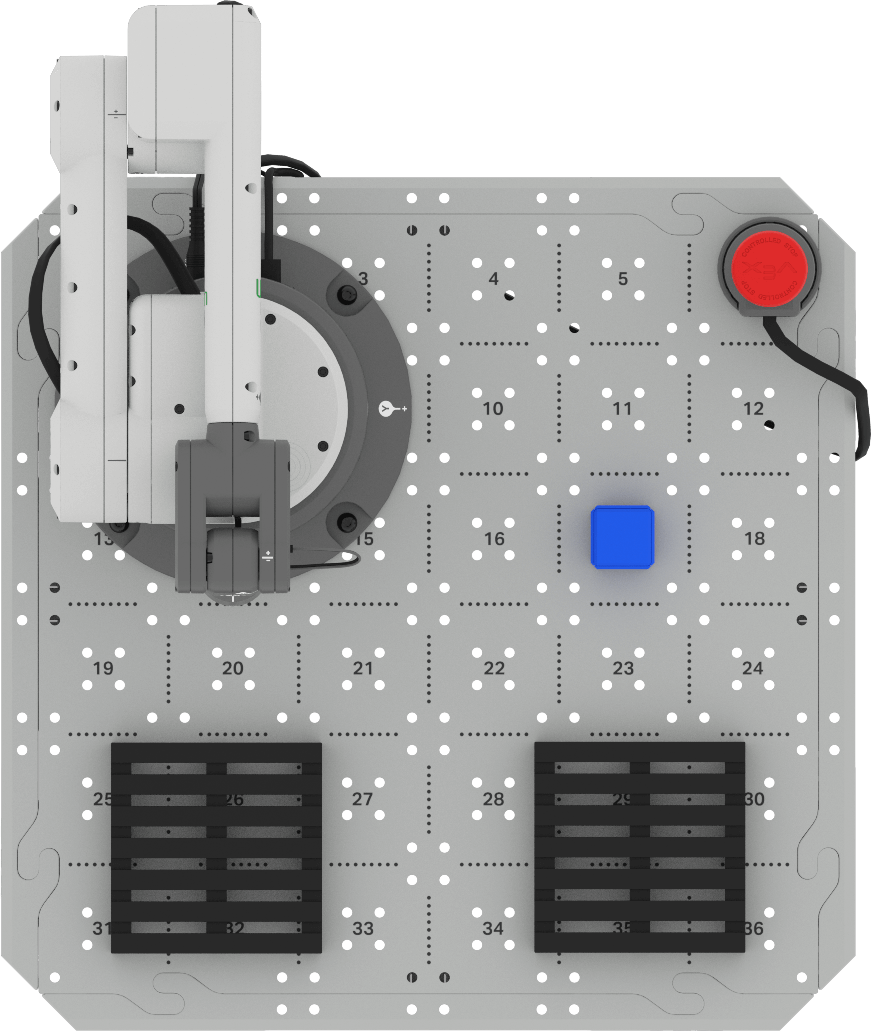
ในการเริ่มต้นให้วางคิวบ์บนตำแหน่งไทล์ 17 ดังที่แสดงในภาพนี้ นี่จะเป็นโซนโหลดสำหรับ Cube นะคะ บันทึกการตั้งค่านี้ลงในสมุดบันทึกวิศวกรรมของคุณ
รวบรวมพิกัดกับผู้ตรวจสอบ
ก่อนที่คุณจะสามารถเขียนรหัสแขน 6 แกนเพื่อรับลูกบาศก์คุณจำเป็นต้องทราบตำแหน่งพิกัดของลูกบาศก์ พิกัดเหล่านี้สามารถพบได้โดยใช้จอภาพ
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว
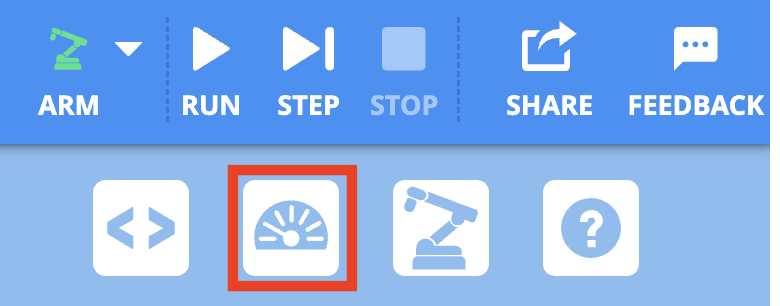
เลือกไอคอนจอภาพในแถบเครื่องมือเพื่อเปิดจอภาพ
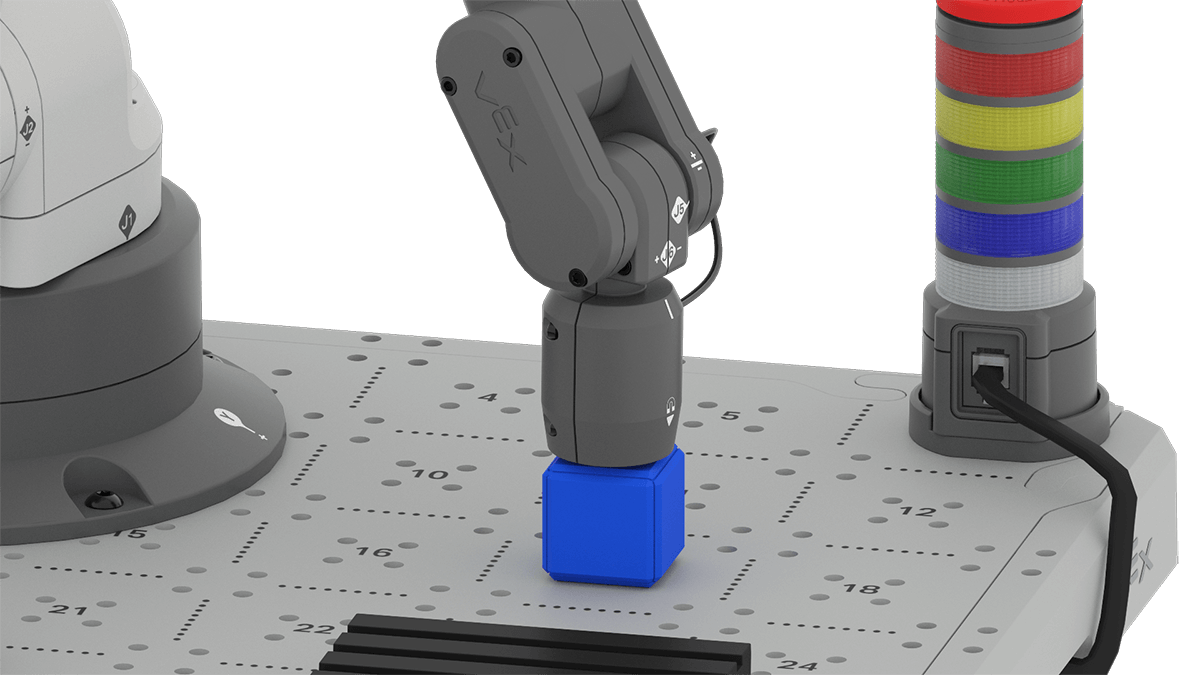
ขยับแขน 6 แกนด้วยตนเองเพื่อให้แม่เหล็กแตะที่ด้านบนของลูกบาศก์ในโซนโหลด
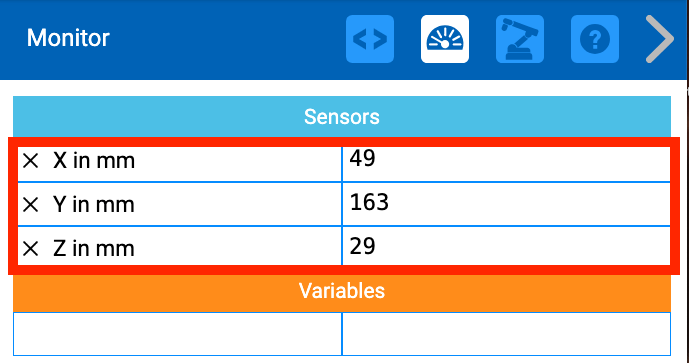
บันทึกพิกัด x, y และ z จาก Monitor Console ในสมุดบันทึกวิศวกรรมของคุณ
ลองแยกแยะพิกัด (x, y, z) ที่เราเพิ่งรวบรวมมา ค่า x, y, z แสดงตำแหน่งที่ Cube ตั้งอยู่บน CTE Tile คุณใช้ตำแหน่งพิกัด x และ y เพื่อเลื่อนปากกาเพื่อวาดในยูนิตก่อนหน้า อย่างไรก็ตามในกรณีนั้นค่า z เป็น 0 เนื่องจากปากกาแบนบนพื้นผิวของกระเบื้อง
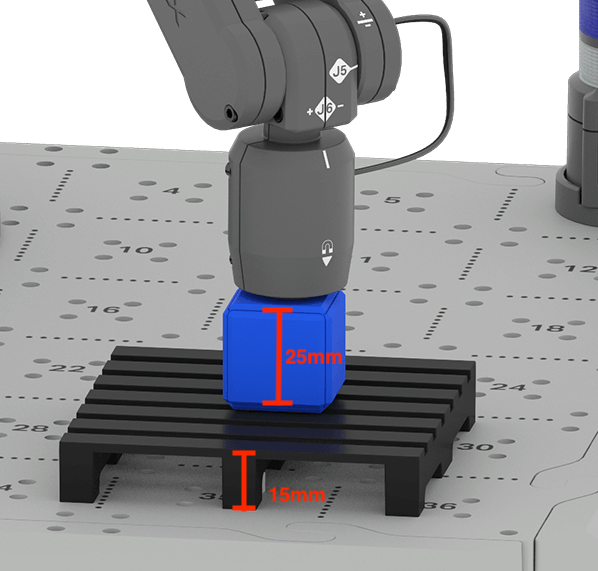
ในการรับลูกบาศก์เราต้องใช้แม่เหล็กเพื่อแตะ ด้านบน ของลูกบาศก์ ซึ่งหมายความว่าเราต้องรู้ว่าด้านบนของลูกบาศก์อยู่ตามแกน z หากเราไม่พิจารณาความสูงของลูกบาศก์เมื่อเข้ารหัสแขน 6 แกนแม่เหล็กจะไม่รับลูกบาศก์อย่างมีประสิทธิภาพ
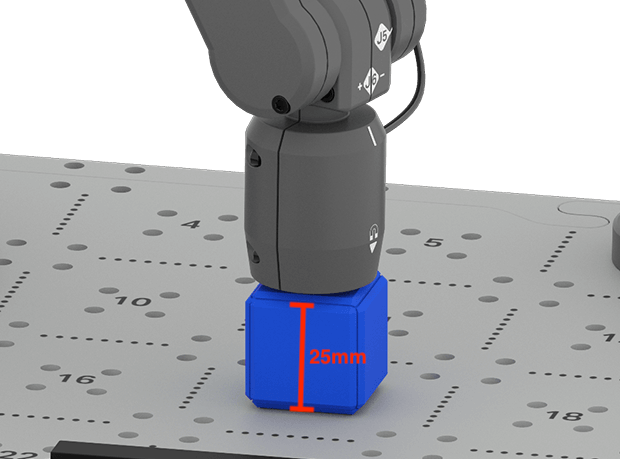
จอมอนิเตอร์กำลังรายงานตำแหน่งของจุดสิ้นสุดของแม่เหล็กเมื่อแตะที่ด้านบนของลูกบาศก์ ค่าในจอภาพอาจไม่เท่ากัน ทุกประการ กับความสูงของลูกบาศก์เมื่อคุณเคลื่อนแขน 6 แกนด้วยตนเอง ด้วยการเคลื่อนที่แบบแมนนวลอาจมีความแปรปรวนบางอย่างกับค่า ตรวจสอบให้แน่ใจว่าคุณใช้ค่าที่คุณเห็นในหน้าจอในโปรเจกต์ของคุณ
ตอนนี้เรารู้แล้วว่าเราจะหยิบลูกบาศก์ได้ที่ไหนเราต้องหาพิกัดว่าเราจะวางลูกบาศก์ตรงไหน
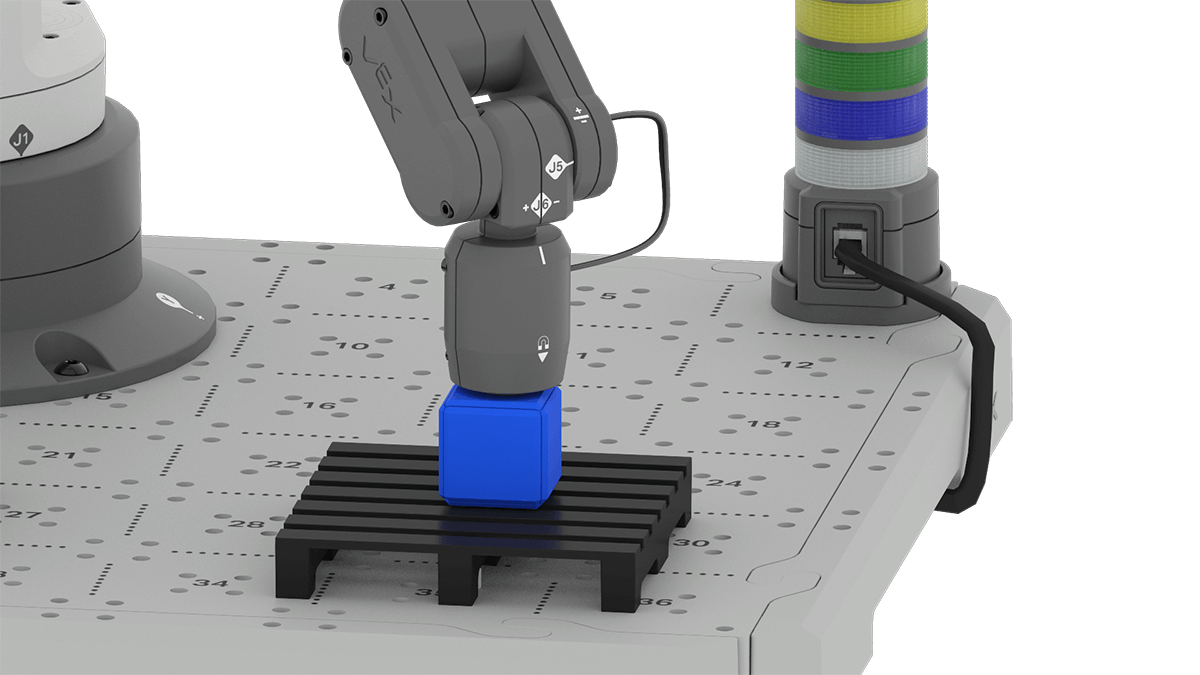
วางลูกบาศก์ไว้ตรงกลางของพาเลท
ขยับแขน 6 แกนด้วยตนเองเพื่อให้แม่เหล็กสัมผัสกับด้านบนของลูกบาศก์
ดูค่า x, y, z ในคอนโซลมอนิเตอร์
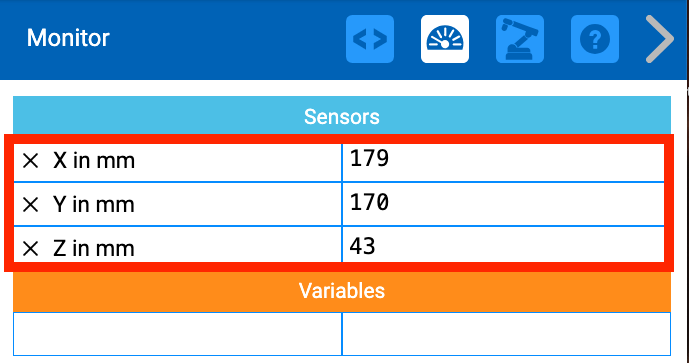
บันทึกพิกัด (x, y, z) ของคิวบ์บนพาเลทในสมุดบันทึกวิศวกรรมของคุณ นี่คือจุดส่ง
สังเกตว่าค่า z ในคอนโซลมอนิเตอร์มีการเปลี่ยนแปลง นี่เป็นเพราะตอนนี้ Cube อยู่ด้านบนของพาเลท นั่นหมายความว่าตำแหน่งของแม่เหล็กเมื่อวางลูกบาศก์บนพาเลทอยู่ไกลออกไปตามแกน z มากกว่าเมื่อลูกบาศก์วางอยู่บนพื้นผิวของกระเบื้อง
สิ่งสำคัญคือต้องสังเกตค่า z นี้เพื่อให้คุณสามารถวาง Cube ลงบนพาเลทได้อย่างมีประสิทธิภาพในแบบที่ควบคุมได้ อีกครั้งค่า z ในจอภาพอาจแตกต่างจากที่คุณเห็นในภาพนี้เล็กน้อย นี่เป็นเพราะความแปรปรวนเมื่อเคลื่อนแขน 6 แกนด้วยตนเอง ตรวจสอบให้แน่ใจว่าได้ใช้ค่าที่คุณเห็นในจอภาพในโปรเจกต์ของคุณ
หยิบลูกบาศก์ในโซนโหลด
ตอนนี้เรารู้แล้วว่าเราจะไปรับลูกบาศก์ที่ไหนและจะไปส่งที่ไหนเราสามารถเริ่มเขียนโค้ดของแขน 6 แกนได้แล้ว ประการแรกแขน 6 แกนต้องย้ายไปที่ลูกบาศก์ในโซนโหลด จากนั้นแม่เหล็กจะถูกเชื่อมต่อเพื่อรับลูกบาศก์
เปิดโปรเจกต์บล็อก ใหม่ โดยทำตามขั้นตอนในวิดีโอนี้
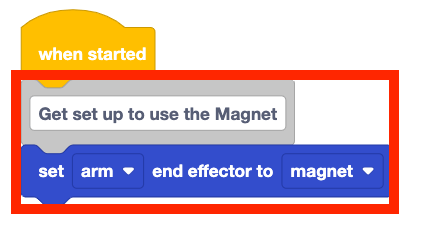
เพิ่มบล็อค Set end effector ในโปรเจกต์ของคุณและตั้งค่าพารามิเตอร์เป็น แม่เหล็ก
โปรดทราบว่าการเพิ่มความคิดเห็นในโปรเจกต์ขณะสร้างโปรเจกต์จะช่วยให้คุณเป็นระเบียบและติดตามพฤติกรรมในโปรเจกต์ได้ง่ายขึ้น
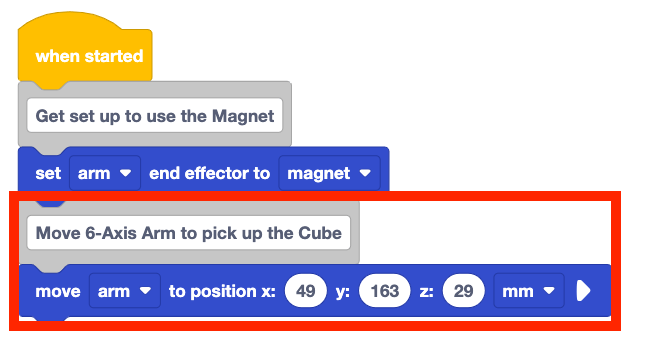
เพิ่มการ ย้ายไป ยังบล็อคตำแหน่งในโครงการ ตั้งค่าพารามิเตอร์ x, y, z เป็นพิกัดของตำแหน่งโซนโหลดที่คุณบันทึกไว้ในสมุดบันทึกวิศวกรรมของคุณ
โปรดทราบว่าพิกัด (x, y, z) ที่แสดงในที่นี้เป็นตัวอย่าง ของคุณอาจแตกต่างกันเล็กน้อยตามตำแหน่งของลูกบาศก์และแขน 6 แกนเมื่อคุณรวบรวมค่าด้วยตนเอง อย่าลืมใช้ พิกัดในโปรเจกต์
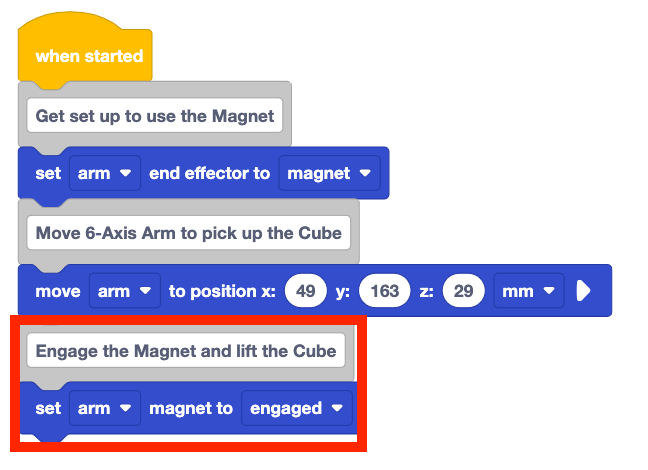
เพิ่ม บล็อคเซ็ตแม่เหล็ก ในโปรเจกต์ ตรวจสอบให้แน่ใจว่าตั้งค่าพารามิเตอร์เป็น หมั้นแล้ว
คุณต้องใช้ บล็อกแม่เหล็ก ชุดเพื่อเชื่อมต่อแม่เหล็กเพื่อดึงดูดลูกบาศก์ให้หยิบขึ้นมา
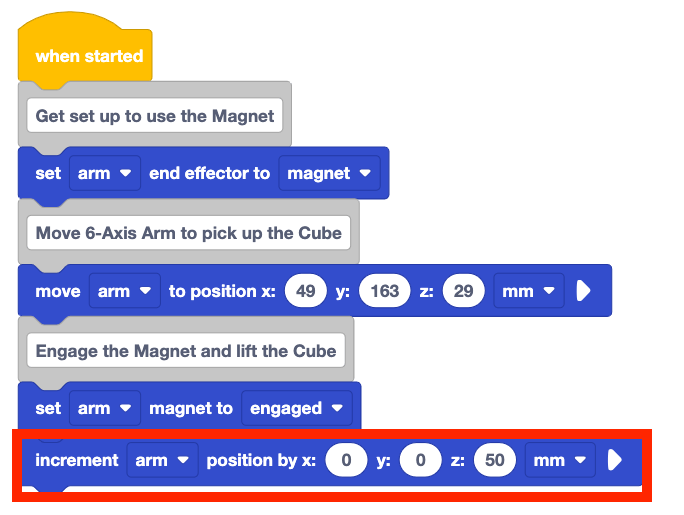
เพิ่มบล็อคตำแหน่งที่ เพิ่มขึ้นในโปรเจกต์ของคุณและตั้งค่าพารามิเตอร์ z เป็น 50
สิ่งนี้จะทำให้แขน 6 แกนยกขึ้นตามแกน z รับลูกบาศก์จากตำแหน่งเริ่มต้นบนกระเบื้อง
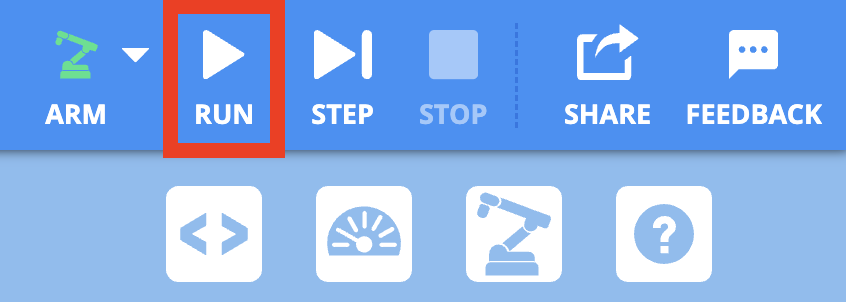
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว ดำเนินโครงการและสังเกตพฤติกรรมของแขน 6 แกน
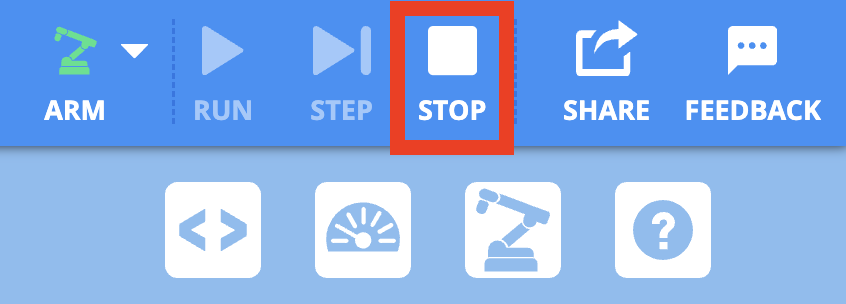
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จสิ้น
มันรับ Cube จากโซนโหลดตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
วางลูกบาศก์บนพาเลท
ตอนนี้ลูกบาศก์ถูกหยิบขึ้นมาโดยแขน 6 แกนมันสามารถเคลื่อนย้ายไปยังพาเลทได้ ขั้นแรกแขน 6 แกนจะย้ายลูกบาศก์เหนือตำแหน่งวางบนพาเลท จากนั้นจะลดลูกบาศก์ลงไปที่พาเลทและปล่อยแม่เหล็กเพื่อวางลูกบาศก์
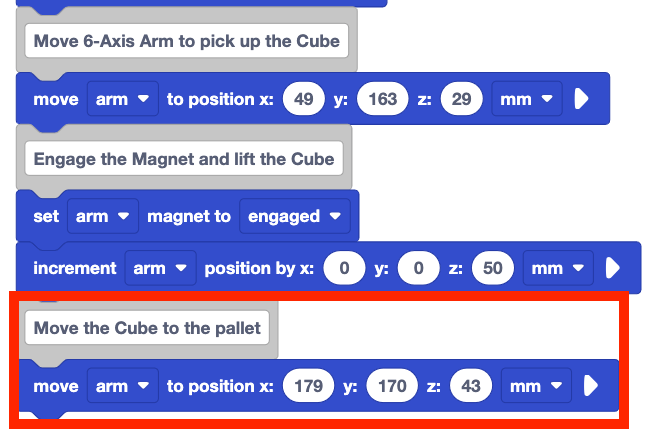
เพิ่มการ ย้ายไป ยังบล็อคตำแหน่งในโครงการ ตั้งค่าพารามิเตอร์ x, y, z เป็นพิกัดของสถานที่ส่งที่บันทึกไว้ในสมุดบันทึกวิศวกรรมของคุณ
อย่าลืมใช้ พิกัด ของคุณเพราะตัวอย่างที่แสดงในที่นี้อาจแตกต่างจากของคุณเอง
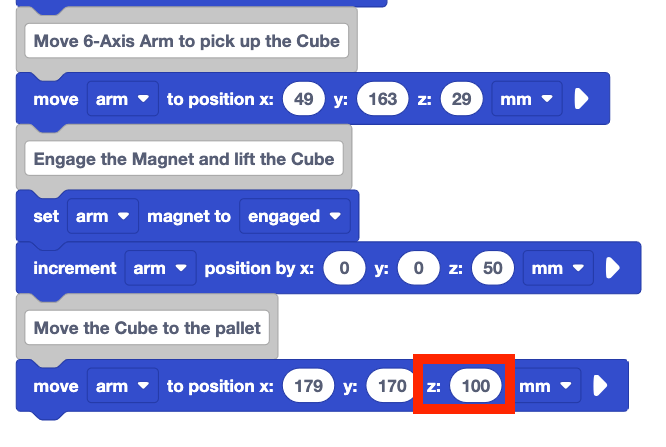
เพิ่มประมาณ 50 ไปยังพิกัด z ของคุณใน บล็อก ย้ายไปยังตำแหน่ง
สิ่งนี้กำลังถูกเพิ่มเข้ามาเนื่องจากแกนแขน 6 แกนจำเป็นต้องย้าย ลูกบาศก์ เหนือตำแหน่งที่ส่ง โดยการเพิ่มพิกัด z คุณสามารถตรวจสอบให้แน่ใจว่าคิวบ์อยู่ในตำแหน่งที่ถูกต้อง สิ่งนี้ยังช่วยให้แน่ใจว่าแขนหลีกเลี่ยงสิ่งกีดขวางใดๆที่อาจมีอยู่
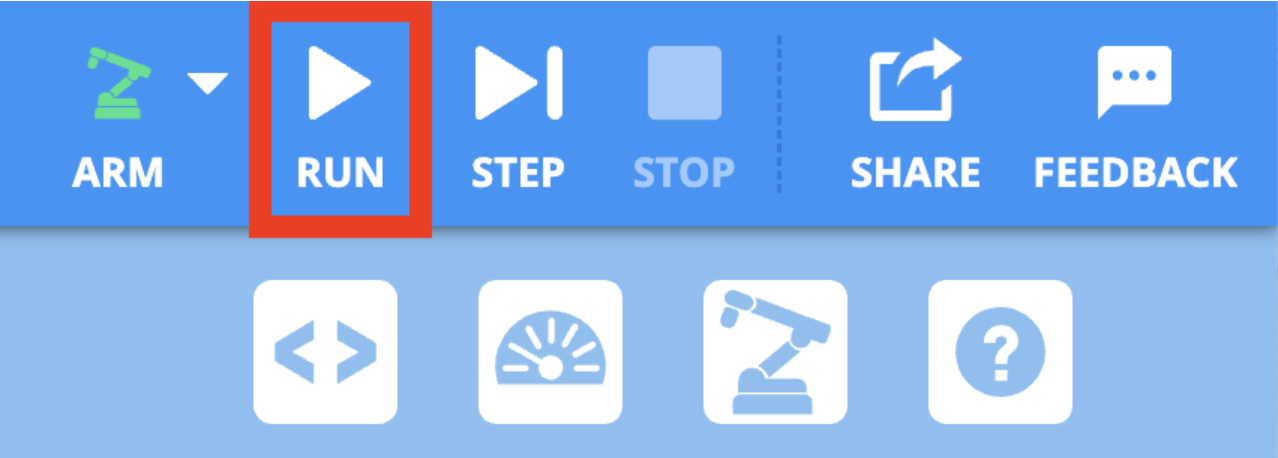
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้วและวาง Cube ไว้ในโซนโหลด
เรียกใช้โปรเจกต์เพื่อทดสอบ ตำแหน่งสิ้นสุดของคิวบ์อยู่ที่ไหนเมื่อดำเนินโครงการ?
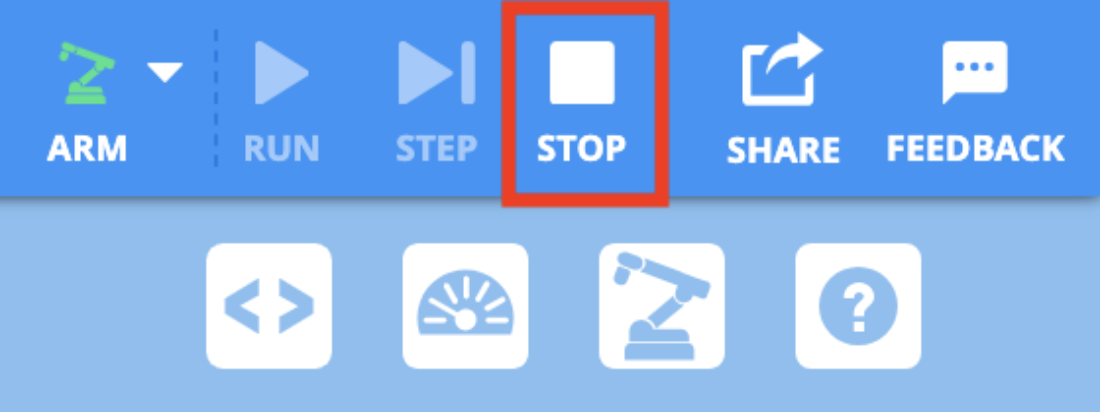
หยุดโครงการ บันทึกสิ่งที่เกิดขึ้นเมื่อโครงการดำเนินการในสมุดบันทึกวิศวกรรมของคุณ
คุณควรสังเกตการเคลื่อนที่ของแขน 6 แกนไปยังลูกบาศก์หยิบขึ้นมาโดยใช้แม่เหล็กและเคลื่อนลูกบาศก์ไปเหนือกึ่งกลางของพาเลทโดยตรงการเคลื่อนไหว นี้ทำให้แน่ใจว่าแม่เหล็กของคุณอยู่ด้านบนของจุดที่ถูกต้องโดยตรงก่อนที่จะลดระดับลงเพื่อส่งลูกบาศก์
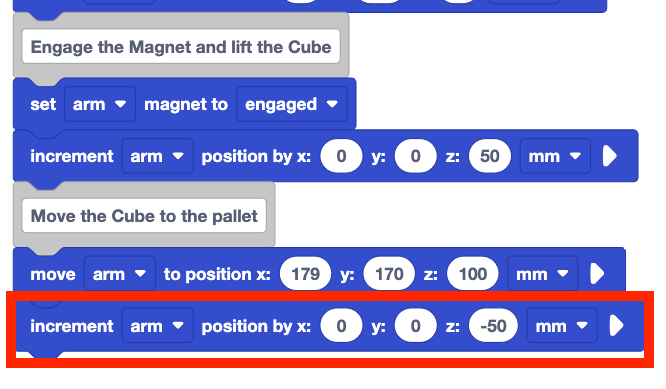
เพิ่ม บล็อกตำแหน่งที่เพิ่มขึ้นในโครงการ ตั้งค่าพารามิเตอร์ z เป็น -50
การดำเนินการนี้จะเลื่อนแขน 6 แกนลง 50 มม. เพื่อวางลูกบาศก์บนพาเลท
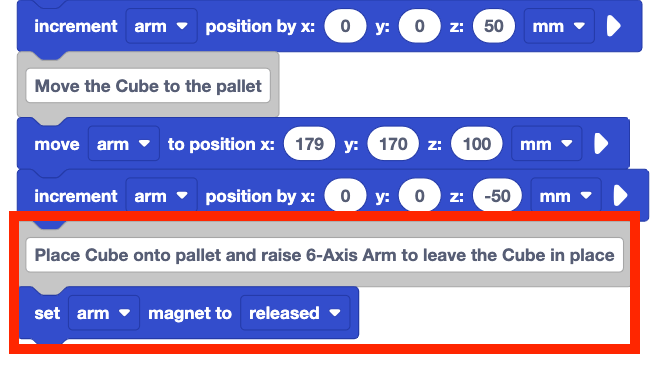
เพิ่ม บล็อคเซ็ตแม่เหล็ก ในโปรเจกต์ ตั้งค่าพารามิเตอร์เป็น ปล่อยแล้ว
สิ่งนี้จะปลดแม่เหล็กเพื่อให้ลูกบาศก์ถูกปล่อยออกมาบนพาเลท
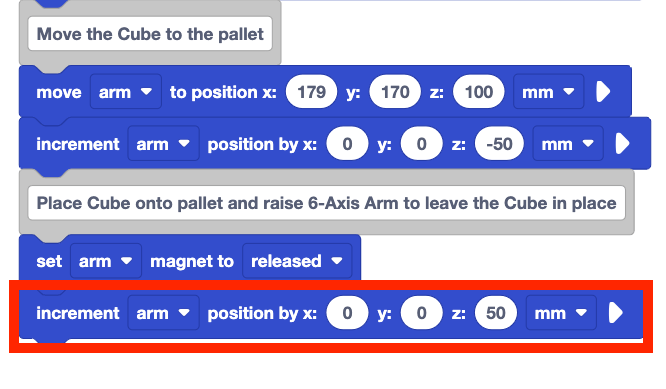
เพิ่มบล็อกตำแหน่งการเพิ่มขึ้นในโครงการ ตั้งค่าพารามิเตอร์ z เป็น 50
ซึ่งจะยกแขน 6 แกนขึ้นเพื่อวางลูกบาศก์บนพาเลท
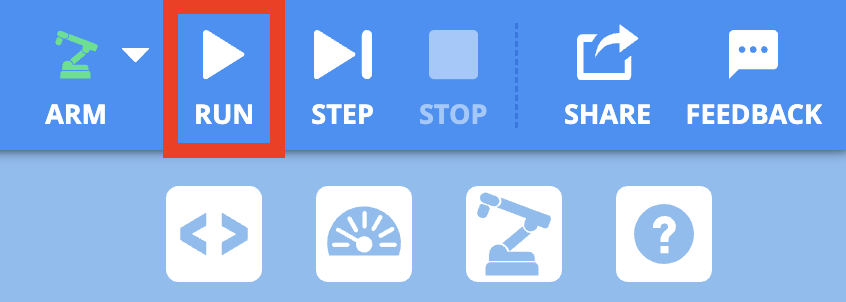
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้วและวาง Cube ไว้ในโซนโหลด
เรียกใช้โปรเจกต์เพื่อทดสอบ สังเกตพฤติกรรมของแขน 6 แกน
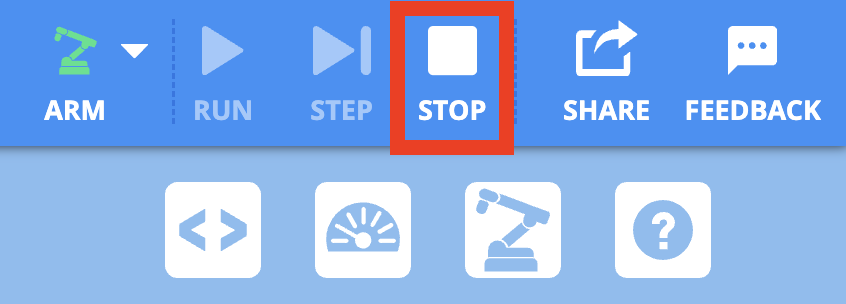
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จสิ้น
มันหยิบและวางลูกบาศก์บนพาเลทตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
อย่าลืมเปลี่ยนชื่อและบันทึกโปรเจกต์
ตอนนี้คุณได้สร้างและทดสอบโครงการแล้วคุณควรได้เห็นการกระทำต่อไปนี้จากแขน 6 แกน:
- ย้าย ไปยังคิวบ์ที่โซนโหลด
- เลื่อน ขึ้นไปตามแกน z
- ย้าย ไปยังจุดส่ง
- เลื่อน ลงไปตามแกน z
- วางลูกบาศก์
- เลื่อน กลับขึ้นไปตามแกน z เพื่อให้แน่ใจว่าได้วางลูกบาศก์แล้ว
ไฟล์วิดีโอ
การเคลื่อนที่ไปตามแกน z ด้วย บล็อกตำแหน่งการ เพิ่มขึ้นเป็นส่วนสำคัญของกระบวนการ ซึ่งจะช่วยให้คุณมั่นใจได้ว่าแม่เหล็กได้รับลูกบาศก์แล้ว การเคลื่อนที่ของแกน z ยังช่วยให้คุณมั่นใจได้ว่าการวางตำแหน่งของลูกบาศก์เหนือพาเลทถูกต้อง นี่คล้ายกับเกมปั้นจั่นที่อาเขต คุณต้องการย้ายเครนเองเหนือจุดส่งหรือจุดรับก่อนที่จะย้ายลงโดยตรง
พาเลทจะไม่ค่อยออกจากคลังสินค้าที่มีการโหลดเพียงแพคเกจเดียว ในขณะที่คุณยังคงสร้างโปรเจกต์และย้ายคิวบ์ไปยังพาเลทคุณจะต้องตรวจสอบให้แน่ใจว่าแต่ละตำแหน่งมีความแม่นยำ ด้วยวิธีนี้คุณจะสามารถจัดส่งพัสดุ (ก้อน) ให้ได้มากที่สุดเท่าที่จะเป็นไปได้ไปยังปลายทางสุดท้าย คุณจะสำรวจการย้ายลูกบาศก์หลายก้อนไปยังพาเลทในบทเรียนที่ 3 ของหน่วยนี้
กิจกรรม
ตอนนี้คุณได้ ย้ายลูกบาศก์หนึ่งอันจากโซนโหลดไปยังพาเลทคุณจะได้ฝึกทักษะเหล่านี้ ในกิจกรรมนี้คุณจะสร้างโปรเจกต์ของคุณจากบทเรียนนี้เพื่อเขียนรหัสแขน 6 แกนเพื่อรับลูกบาศก์ที่สองจากโซนโหลดและวางไว้บนพาเลทที่สอง

กิจกรรม: เขียนรหัสแขน 6 แกนเพื่อวางลูกบาศก์หนึ่งอันบนพาเลทแต่ละพาเลท
- วางแผนว่าคุณจะสร้างโปรเจกต์ของคุณอย่างไรเพื่อใส่รหัสแขน 6
แกนเพื่อรับลูกบาศก์ที่สองจากโซนโหลดและวางไว้บนพาเลทที่สองกับกลุ่มของคุณ
ตรวจสอบให้แน่ใจว่าคุณทุกคนเห็นด้วยกับแนวทางของคุณก่อนที่จะเริ่มแก้ไขโครงการ
- บันทึกแผนของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
- เปลี่ยนชื่อและบันทึกโปรเจกต์ของคุณลงในกิจกรรม หน่วยที่ 7 บทเรียนที่ 2 ก่อนที่คุณจะเริ่มแก้ไขโปรเจกต์
- แก้ไขโปรเจกต์ใน VEXcode ให้ตรงกับแผนที่กลุ่มของคุณตกลงกันไว้
- เรียกใช้โปรเจกต์เพื่อทดสอบ วางลูกบาศก์ที่สองด้วยตนเองที่โซนโหลดเมื่อวางลูกบาศก์แรกแล้ว
- แขน 6 แกนสามารถเคลื่อนย้ายลูกบาศก์ทั้งสองได้สำเร็จตามที่คุณตั้งใจไว้หรือไม่? ควรมีลูกบาศก์หนึ่งอันบนพาเลทแต่ละอัน หากไม่มีให้แก้ไขโปรเจกต์ต่อไปจนกว่าคุณจะวางคิวบ์ทั้งสองไว้บนพาเลทแต่ละพาเลทเรียบร้อยแล้ว
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อไปยัง Mid-Unit Reflection