
खेल
भाग 1 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि उन्हें कोड बेस के लिए दो नमूने एकत्र करने और दफनाने के लिए एक परियोजना बनाने की चुनौती दी जाएगी। विद्यार्थियों को याद दिलाएं कि कोड बेस एक समय में केवल एक ही नमूना ले जा सकता है, इसलिए उन्हें रोबोट को कोड करके नमूना एकत्र करने के लिए बाहर जाना होगा तथा दो बार बेस पर वापस आना होगा। चूंकि छात्र कोई भी दो नमूने और कोई भी मार्ग चुन सकते हैं जो कार्य को पूरा करता है, इसलिए उनकी सभी परियोजनाएं अलग-अलग होंगी। नीचे एक उदाहरण समाधान का वीडियो दिया गया है।
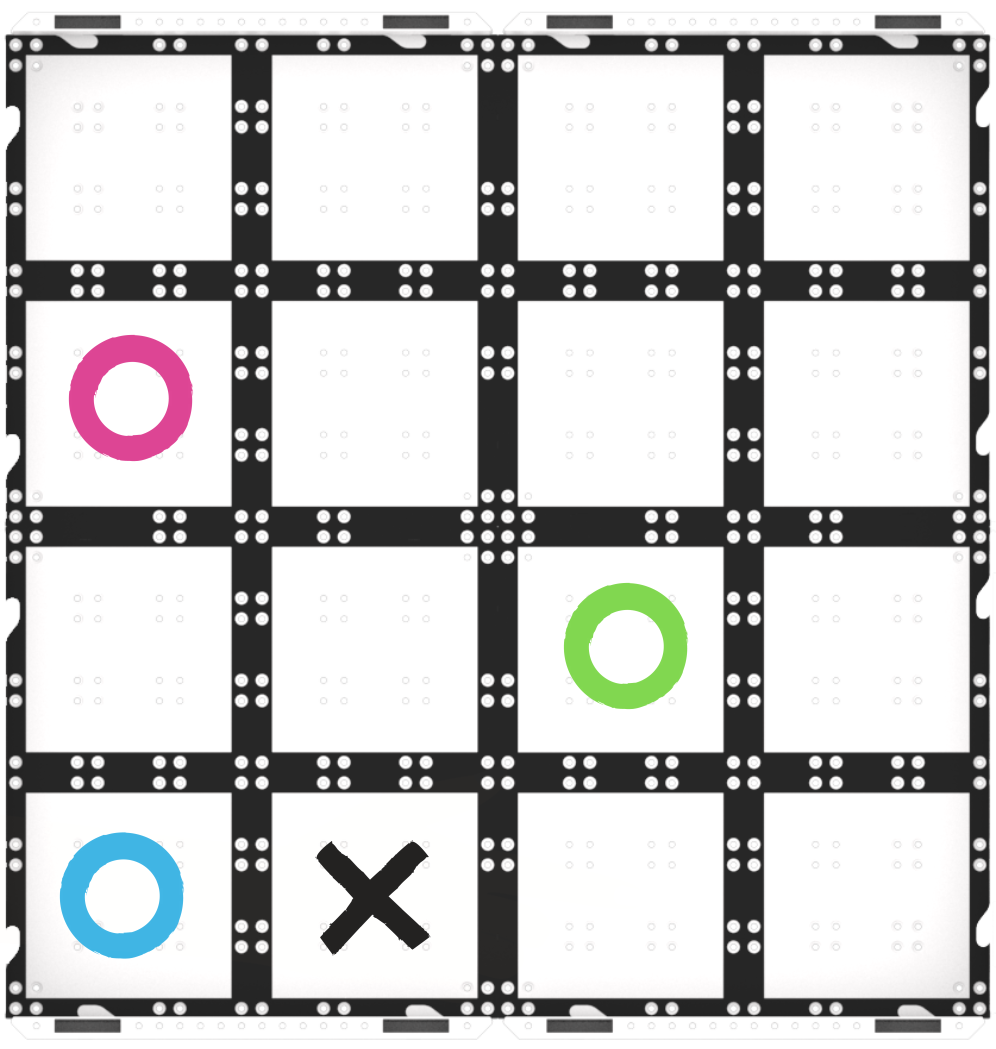
निम्नलिखित एनीमेशन में, रोबोट दो स्थान आगे बढ़ता है, 90 डिग्री बायीं ओर मुड़ता है, और फिर लाल नमूना एकत्र करने के लिए एक स्थान और आगे बढ़ता है। फिर, लाल नमूना एकत्रित करने के बाद बेस पर वापस लौटने के लिए, रोबोट 180 डिग्री घूमता है, एक स्थान आगे बढ़ता है, 90 डिग्री दाईं ओर घूमता है, और दो स्थान आगे बढ़ता है। अगला नीला नमूना एकत्र करने के लिए, रोबोट 90 डिग्री दाईं ओर मुड़ता है और एक स्थान आगे बढ़ता है। नीला नमूना एकत्र करने के बाद बेस पर वापस लौटने के लिए रोबोट एक स्थान पीछे की ओर चलता है।
वीडियो फाइल- विद्यार्थियों को निर्देश दें कि वे अपनी परियोजनाएं बनाने के लिए प्रयोगशाला 1 में पहले सीखे गए ब्लॉकों का उपयोग करें। छात्रों के साथ मिलकर उन चरणों की पहचान करें जिन्हें कोड बेस को प्रत्येक नमूने को एकत्रित करने और दफनाने के लिए पूरा करना होगा। These steps are also listed in the Lab 2 Image Slideshow (Google / .pptx / .pdf) for students to reference while they build their projects.
- नमूना स्थान पर ड्राइव करें।
- एलईडी बम्पर सेंसर 3 सेकंड के लिए लाल चमकता है यह दिखाने के लिए कि नमूना एकत्र किया जा रहा है।
- एलईडी बम्पर सेंसर की चमक 3 सेकंड के बाद बंद हो जाती है, यह दिखाने के लिए कि नमूना एकत्र कर लिया गया है।
- आधार पर वापस लौटें.
- एलईडी बम्पर सेंसर 3 सेकंड के लिए लाल चमकता है यह दिखाने के लिए कि नमूना दफनाया जा रहा है।
- एलईडी बम्पर सेंसर की चमक 3 सेकंड के बाद बंद हो जाती है, यह दिखाने के लिए कि नमूना दफना दिया गया है।
-
छात्रों को दिखाएं कि उन्हें मैदान पर अपने रोबोट कहां रखने हैं। छात्रों को हमेशा 'X' से शुरू करना चाहिए, लेकिन वे कोड बेस को अपने प्रोजेक्ट के अनुसार सर्वोत्तम रूप से तैयार कर सकते हैं। कुछ छात्र पहले नीले वृत्त पर जाने का विकल्प चुन सकते हैं, तथा रोबोट को मैदान पर रखते समय कोड बेस को उस स्थान की ओर उन्मुख कर सकते हैं।
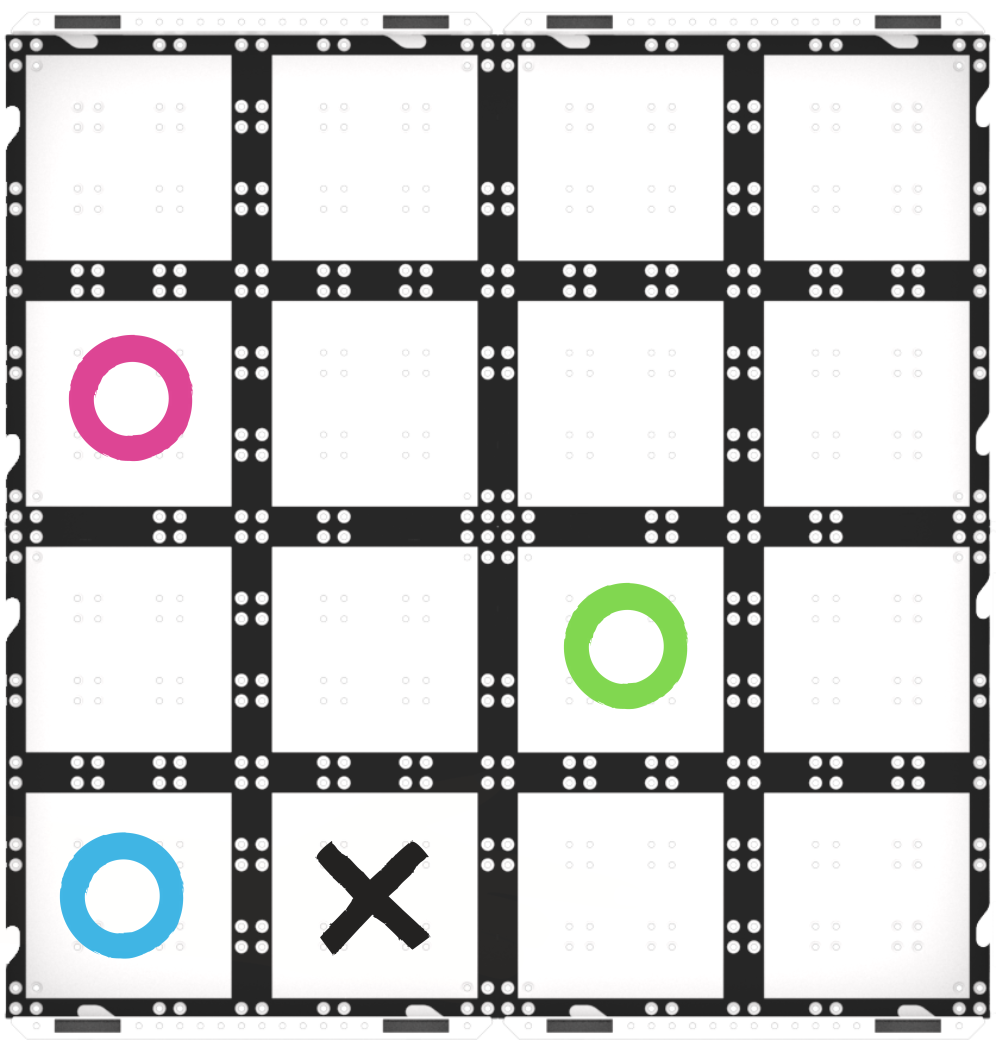
फ़ील्ड सेटअप
- विद्यार्थियों को निर्देश दें कि वे अपनी परियोजनाएं बनाने के लिए प्रयोगशाला 1 में पहले सीखे गए ब्लॉकों का उपयोग करें। छात्रों के साथ मिलकर उन चरणों की पहचान करें जिन्हें कोड बेस को प्रत्येक नमूने को एकत्रित करने और दफनाने के लिए पूरा करना होगा। These steps are also listed in the Lab 2 Image Slideshow (Google / .pptx / .pdf) for students to reference while they build their projects.
- मॉडलछात्रों के लिए मॉडल कि कैसे VEXcode GO में अपने कोड बेस को अपने डिवाइस से कॉन्फ़िगर और कनेक्ट करें।
- छात्रों को यह दिखाकर शुरुआत करें कि वे अपने कोड बेस पर स्थित ब्रेन को VEXcode GO में अपने डिवाइस से कैसे कनेक्ट करें। Because connection steps vary between devices, see the Connecting articles of the VEXcode GO VEX Library for specific steps to connect the VEX GO Brain to your computer or tablet.
- उन्हें कोड बेस के लिए VEXcode GO को भी कॉन्फ़िगर करना होगा। If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
छात्रों के लिए मॉडल कि वे VEXcode GO में अपने प्रोजेक्ट का नामकरण, सेव और परीक्षण कैसे करें।
- एक बार जब छात्र अपना प्रोजेक्ट बना लें, तो उन्हें अपने प्रोजेक्ट का नाम Collect and Bury 2रखने को कहें और उसे अपने डिवाइस में सेव कर लें। See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
- आप प्रोजेक्ट की कोडिंग शुरू करने के लिए रणनीति के रूप में एंगेज समाधान का उपयोग कर सकते हैं। यदि आप Engage प्रोजेक्ट को आधार के रूप में उपयोग कर रहे हैं, तो उन्हें VEXcode GO में नीचे दिए गए कोड को पुनः बनाने को कहें तथा प्रोजेक्ट का परीक्षण करके देखें कि दूसरे नमूने को एकत्रित करने और दफनाने के लिए कौन से ब्लॉकों को जोड़ने की आवश्यकता है।
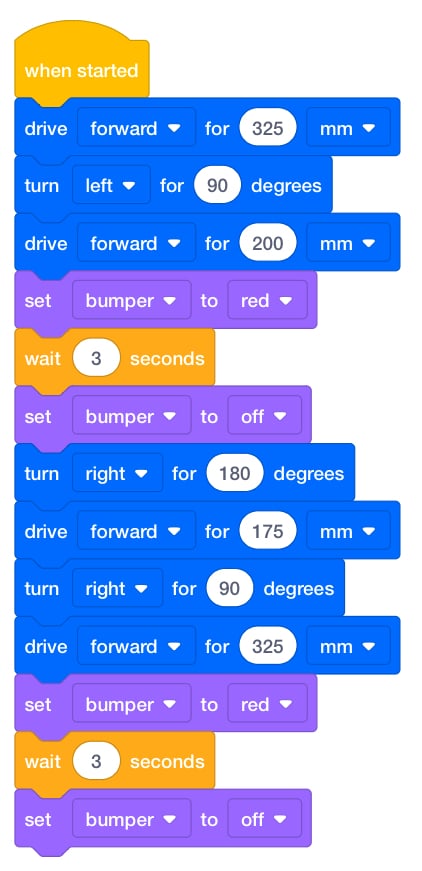
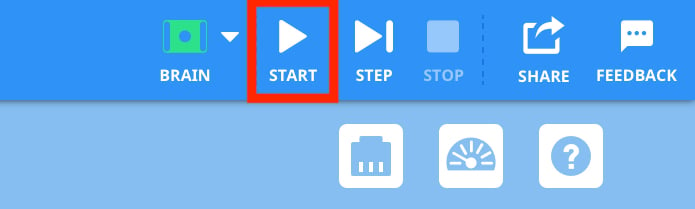
एंगेज प्रोजेक्ट - एक बार कोड बेस को फ़ील्ड पर रख दिए जाने के बाद, छात्रों को अपने प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में 'प्रारंभ' का चयन करने को कहें।
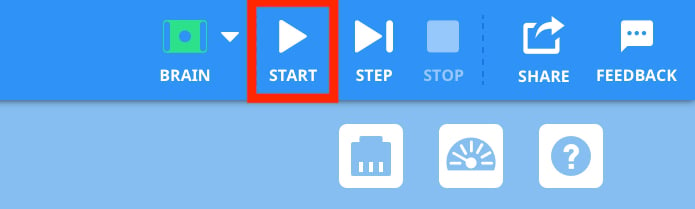
प्रोजेक्ट का परीक्षण करने के लिए प्रारंभ चुनें - जब कोड बेस प्रत्येक नमूना स्थान पर पहुंच जाता है, तो छात्रों को अपना 'नमूना' रोबोट के शीर्ष पर रखना चाहिए, जब एलईडी बम्पर सेंसर लाल हो जाए। रोबोट के बेस पर वापस आने के बाद, छात्रों को कोड बेस के शीर्ष से नमूना हटा देना चाहिए (जब एलईडी बम्पर सेंसर पुनः लाल हो जाए) ताकि यह पता चल सके कि नमूना दफना दिया गया है।
-
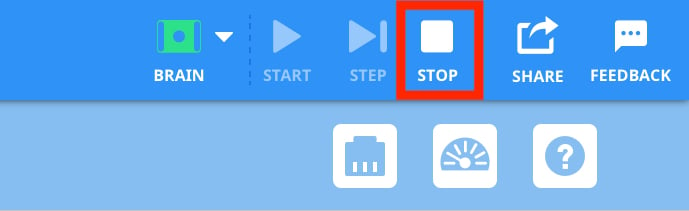
प्रोजेक्ट समाप्त होने के बाद, छात्रों को टूलबार में 'स्टॉप' बटन का चयन करना चाहिए।

स्टॉप चुनें - यहां दो नमूने एकत्र करने और उन्हें दफनाने का एक संभावित समाधान दिया गया है। आप अपने विद्यार्थियों के साथ दो नमूने एकत्र करने के लिए किसी परियोजना का मॉडलिंग या निर्माण करते समय इसे संदर्भ के रूप में उपयोग कर सकते हैं।
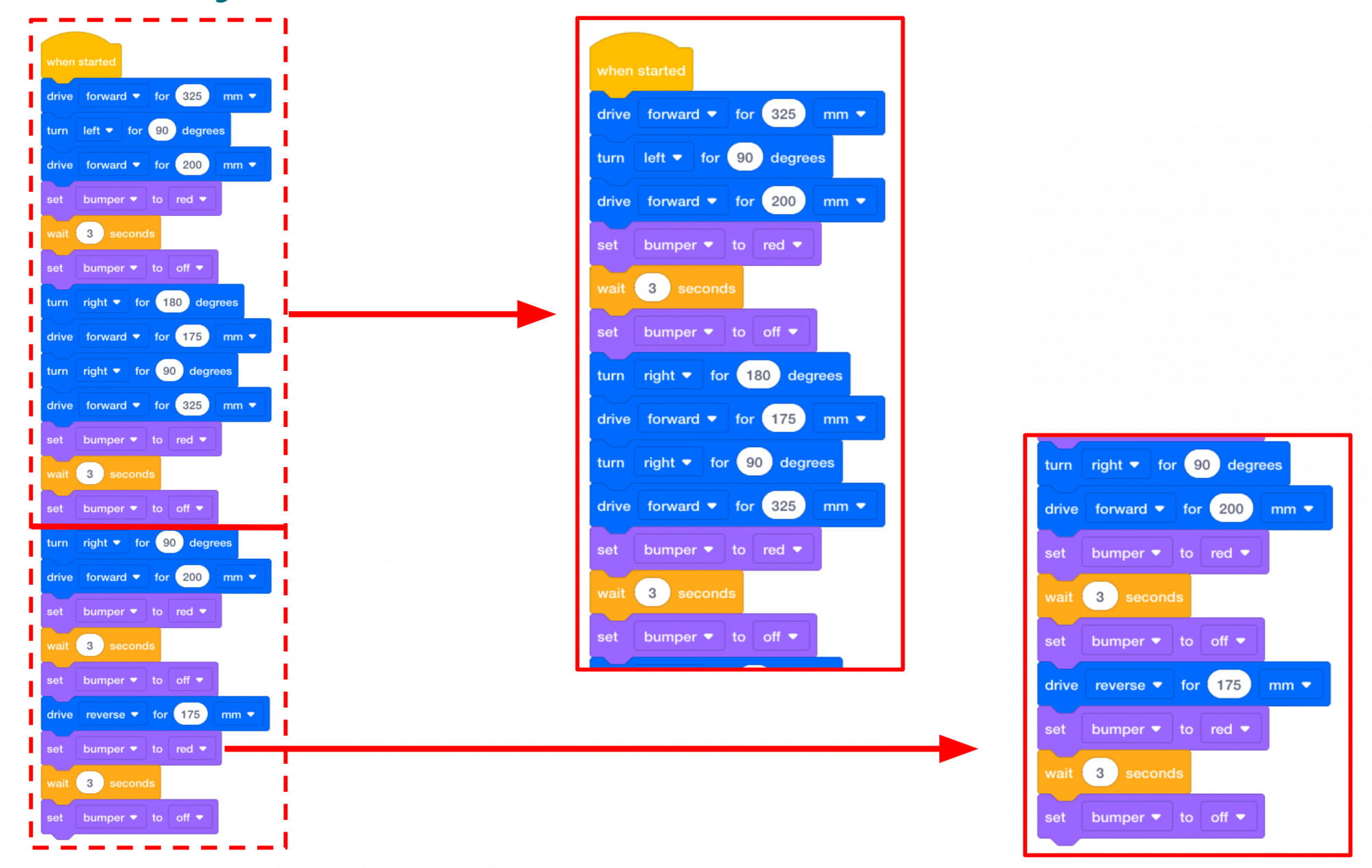
संभावित खेल भाग 1 समाधान जो समूह अपना प्रोजेक्ट जल्दी पूरा कर लेते हैं, उन्हें कोड बेस का पथ बदलने के लिए चुनौती दें ताकि वे वही दो नमूने एकत्र कर सकें। दो नमूनों को एकत्रित करने और दफनाने के लिए वे कितने अलग-अलग रास्तों को कोड कर सकते हैं?
- सुविधा प्रदान करनाछात्रों के साथ बातचीत को सुविधाजनक बनाना, जब वे अपनी परियोजनाएं बना रहे हों और उनका परीक्षण कर रहे हों। समूहों की परियोजना पहली बार में संभवतः सही नहीं होगी। उन्हें अपने VEXcode GO प्रोजेक्ट्स को तब तक संपादित और पुनः परीक्षण करने को कहें जब तक कि कोड बेस दो नमूने एकत्र करने और उन्हें दफनाने में सक्षम न हो जाए।
- आप कौन से दो नमूने एकत्र करने की योजना बना रहे हैं? किस क्रम मे?
- कोड बेस को पहले नमूने तक ले जाने के लिए किस प्रकार आगे बढ़ना होगा? दूसरा?
- यदि आप किसी ब्लॉक को 90 डिग्री से 180 डिग्री में बदल दें, तो कोड बेस किस प्रकार आगे बढ़ेगा? क्या आप मुझे अपने हाथों से दिखा सकते हैं?
- याद दिलाएंविद्यार्थियों को ब्लॉकों के क्रम (या अनुक्रम) और प्रत्येक ब्लॉक के लिए निर्धारित मापदंडों की जांच करने के लिए याद दिलाएं। क्या कोड बेस बायीं ओर की बजाय दायीं ओर मुड़ गया? क्या नमूना अधिक दूर था? कोड बेस की यात्रा के लिए सही दूरी का पता लगाने के लिए आप [ड्राइव फॉर] ब्लॉक में पैरामीटर कैसे बदल सकते हैं?
कक्षा में चक्कर लगाते हुए छात्रों से प्रत्येक मुद्दे के समाधान के बारे में बात करें। यह एक पुनरावृत्तीय प्रक्रिया होगी, इसलिए विद्यार्थियों को याद दिला दें कि मंगल रोवर्स को कोड करने वाले वैज्ञानिकों को भी रोवर को अपनी इच्छानुसार चलाने के लिए कई बार प्रयास करना पड़ता है।
- पूछेंविद्यार्थियों से उन अन्य स्थानों के बारे में पूछें जहां वैज्ञानिकों को किसी क्षेत्र का अध्ययन करने में मदद करने के लिए रोवर्स भेजे जा सकते हैं। क्या चंद्रमा पर रोवर उपयोगी होगा? ज्वालामुखी के अन्दर? पानी के नीचे? क्यों या क्यों नहीं?
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह ने दो नमूनेएकत्र करने और दफनाने के लिए एक परियोजना बनाई है, एक संक्षिप्त बातचीत के लिए एक साथ आएं।
- आपके समूह ने इस परियोजना को बनाने के लिए एक साथ मिलकर कैसे काम किया?
- इशारों और शब्दों का उपयोग करते हुए, क्या आप मुझे बता सकते हैं कि आपका कोड बेस पहले नमूने को इकट्ठा करने और दफनाने के लिए कैसे आगे बढ़ा?
- आपके समूह ने आगे किस नमूने पर जाने का चयन किया? कोड बेस ने दूसरे नमूने को एकत्रित करने और दफनाने का काम कैसे किया?
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि उन्हें अपने प्ले पार्ट 1 प्रोजेक्ट में कुल तीन नमूने एकत्र करने और दफनाने की चुनौती दी जाएगी। विद्यार्थियों को याद दिलाएं कि कोड बेस एक समय में केवल एक ही नमूना ले जा सकता है, इसलिए उन्हें अपने रोबोट को कोड करके तीन बार नमूना एकत्र करने और बेस पर वापस आने के लिए कहना होगा। चूंकि छात्र किसी भी क्रम में नमूने एकत्र करना चुन सकते हैं, इसलिए उनकी परियोजनाएं अलग-अलग होंगी। नीचे एक एनीमेशन दिया गया है जो इस चुनौती का एक संभावित समाधान दर्शाता है।
निम्नलिखित एनीमेशन में, रोबोट दो स्थान आगे बढ़ता है, 90 डिग्री बायीं ओर मुड़ता है, और फिर लाल नमूना एकत्र करने के लिए एक स्थान और आगे बढ़ता है। फिर, लाल नमूना एकत्रित करने के बाद बेस पर वापस लौटने के लिए, रोबोट 180 डिग्री घूमता है, एक स्थान आगे बढ़ता है, 90 डिग्री दाईं ओर घूमता है, और दो स्थान आगे बढ़ता है। अगला नीला नमूना एकत्र करने के लिए, रोबोट 90 डिग्री दाईं ओर मुड़ता है और एक स्थान आगे बढ़ता है। नीला नमूना एकत्र करने के बाद बेस पर वापस लौटने के लिए रोबोट एक स्थान पीछे की ओर चलता है। इसके बाद, हरे नमूने को इकट्ठा करने के लिए, रोबोट एक स्थान पीछे की ओर जाता है, 90 डिग्री दाईं ओर मुड़ता है, और फिर एक स्थान आगे की ओर जाता है। अंत में, बेस पर वापस लौटने के लिए, रोबोट 180 डिग्री दाईं ओर मुड़ता है, एक स्थान आगे बढ़ता है, 90 डिग्री दाईं ओर मुड़ता है, और फिर एक स्थान और आगे बढ़ता है।
वीडियो फाइल - मॉडलविद्यार्थियों के लिए मॉडल कि वे अपने प्रोजेक्ट पर तीसरा नमूना कैसे एकत्रित करें। आपके छात्र स्वयं ही चुनौती पूरी करने में सक्षम हो सकते हैं। हालाँकि, छोटे विद्यार्थियों के लिए, आप एक कक्षा के रूप में मिलकर परियोजना बनाना चाह सकते हैं। यदि आप मिलकर परियोजना बना रहे हैं, तो आप नीचे दिए गए चरणों का पालन कर सकते हैं।
- If students need to open their Collect and Bury 2 projects from Play Part 1, model the device-specific steps to open a project, as shown in the VEX Library articles in the Open and Save section.
- छात्र तीसरे नमूने को इकट्ठा करने और दफनाने के लिए परियोजना के निचले भाग में ब्लॉक जोड़ना शुरू कर सकते हैं। छात्रों को उन चरणों की याद दिलाएं जिन्हें कोड बेस को प्रत्येक नमूने को एकत्र करने और दफनाने के लिए पूरा करना होता है।
- These steps are also listed in the Lab 2 Image Slideshow (Google / .pptx / .pdf) for students to reference while they build their projects.
- नमूना स्थान पर ड्राइव करें।
- एलईडी बम्पर सेंसर 3 सेकंड के लिए लाल चमकता है यह दिखाने के लिए कि नमूना एकत्र किया जा रहा है।
- एलईडी बम्पर सेंसर की चमक 3 सेकंड के बाद बंद हो जाती है, यह दिखाने के लिए कि नमूना एकत्र कर लिया गया है।
- आधार पर वापस लौटें.
- एलईडी बम्पर सेंसर 3 सेकंड के लिए लाल चमकता है यह दिखाने के लिए कि नमूना दफनाया जा रहा है।
- एलईडी बम्पर सेंसर की चमक 3 सेकंड के बाद बंद हो जाती है, यह दिखाने के लिए कि नमूना दफना दिया गया है।
- एक बार जब छात्र अपना प्रोजेक्ट बना लें, तो उन्हें अपने प्रोजेक्ट का नाम Collect and Bury 3 रखने को कहें और उसे अपने डिवाइस में सेव कर लें। See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
- विद्यार्थियों के लिए मॉडल, कि उन्हें फील्ड पर अपने कोड बेस कहां रखने हैं। छात्रों को हमेशा 'X' से शुरू करना चाहिए, लेकिन वे कोड बेस को अपने प्रोजेक्ट के अनुसार सर्वोत्तम रूप से तैयार कर सकते हैं। कुछ छात्र पहले नीले वृत्त पर जाने का विकल्प चुन सकते हैं, तथा रोबोट को मैदान पर रखते समय कोड बेस को उस स्थान की ओर उन्मुख कर सकते हैं।
फ़ील्ड सेटअप - एक बार कोड बेस को फ़ील्ड पर रख दिया जाए, तो छात्रों को अपने प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में प्रारंभ का चयन करने दें।
प्रोजेक्ट का परीक्षण करने के लिए प्रारंभ चुनें - जब कोड बेस प्रत्येक नमूना स्थान पर पहुंच जाए, तो छात्रों को अपना 'नमूना' रोबोट के शीर्ष पर रखना चाहिए। कोड बेस के वापस बेस पर आने के बाद, छात्रों को रोबोट के ऊपर से नमूना हटा देना चाहिए, ताकि यह पता चल सके कि नमूना दफना दिया गया है।
- प्रोजेक्ट समाप्त होने के बाद, विद्यार्थियों को टूलबार में 'स्टॉप' बटन चुनने के लिए याद दिलाएं।
स्टॉप चुनें- यहां तीन नमूनों को एकत्रित करने और दफनाने के संभावित समाधानों में से एक है।

संभावित खेल भाग 1 समाधान - जो समूह अपना प्रोजेक्ट जल्दी पूरा कर लेते हैं, उन्हें कोड बेस का पथ बदलने की चुनौती दें ताकि वे भिन्न क्रम में नमूने एकत्र कर सकें। यह नया प्रोजेक्ट उनके मूल कोड से किस प्रकार तुलना करता है? क्या समान या भिन्न है?
- सुविधा प्रदान करनाजब छात्र चुनौती को पूरा करने के लिए काम कर रहे हों तो उनके साथ बातचीत को सुविधाजनक बनाएं।
- तीसरे नमूने को एकत्रित करने और दफनाने के लिए कोड बेस को किस प्रकार आगे बढ़ना होगा? मुझे अपने हाथों से दिखाओ.
- क्या तीसरे नमूने को एकत्रित करने के लिए कोड बनाना पहले दो नमूनों को एकत्रित करने की तुलना में आसान है या कठिन? क्यों?
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for additional information on the LED Bumper.
- याद दिलाएंविद्यार्थियों को याद दिलाएं कि उन्हें फ़ील्ड को अन्य समूहों के साथ साझा करने की आवश्यकता हो सकती है। अपनी परियोजनाओं का परीक्षण करने के बाद, उन्हें अपने रोबोट को मैदान से हटाना होगा ताकि अन्य छात्र परीक्षण कर सकें।
- सफल परियोजना बनाने के लिए समूहों को अपने कोड का कई बार परीक्षण करना होगा। उन्हें अपने ब्लॉकों के क्रम और प्रत्येक ब्लॉक के मापदंडों की जांच करने के लिए याद दिलाएं ताकि यह सुनिश्चित हो सके कि कोड बेस सही दूरी तक चल रहा है और घूम रहा है और एलईडी बम्पर सही समय तक चमक रहा है।
-
क्या आपको बारी-बारी से बोलने में कोई समस्या है? प्रत्येक समूह को छोटे रंगीन झंडे या रंगीन कागज के टुकड़े दें, जिन्हें वे अपने कम्प्यूटर के साथ अपनी डेस्क पर रखें। जब वे कोडिंग कर रहे हों तो उन्हें पीला झंडा लगाना चाहिए। जब वे परीक्षण के लिए तैयार होंगे तो वे अपनी हरी झंडी दिखा सकते हैं। जैसे ही आप देखें कि समूह अपनी हरी झंडियाँ उठा रहे हैं, उन्हें परीक्षण के लिए फ़ील्ड आवंटित करें। जब उन्हें लगता है कि उनका प्रोजेक्ट पूरा हो गया है और सही है, तो वे उस पर एक सितारा वाला झंडा लगा सकते हैं!
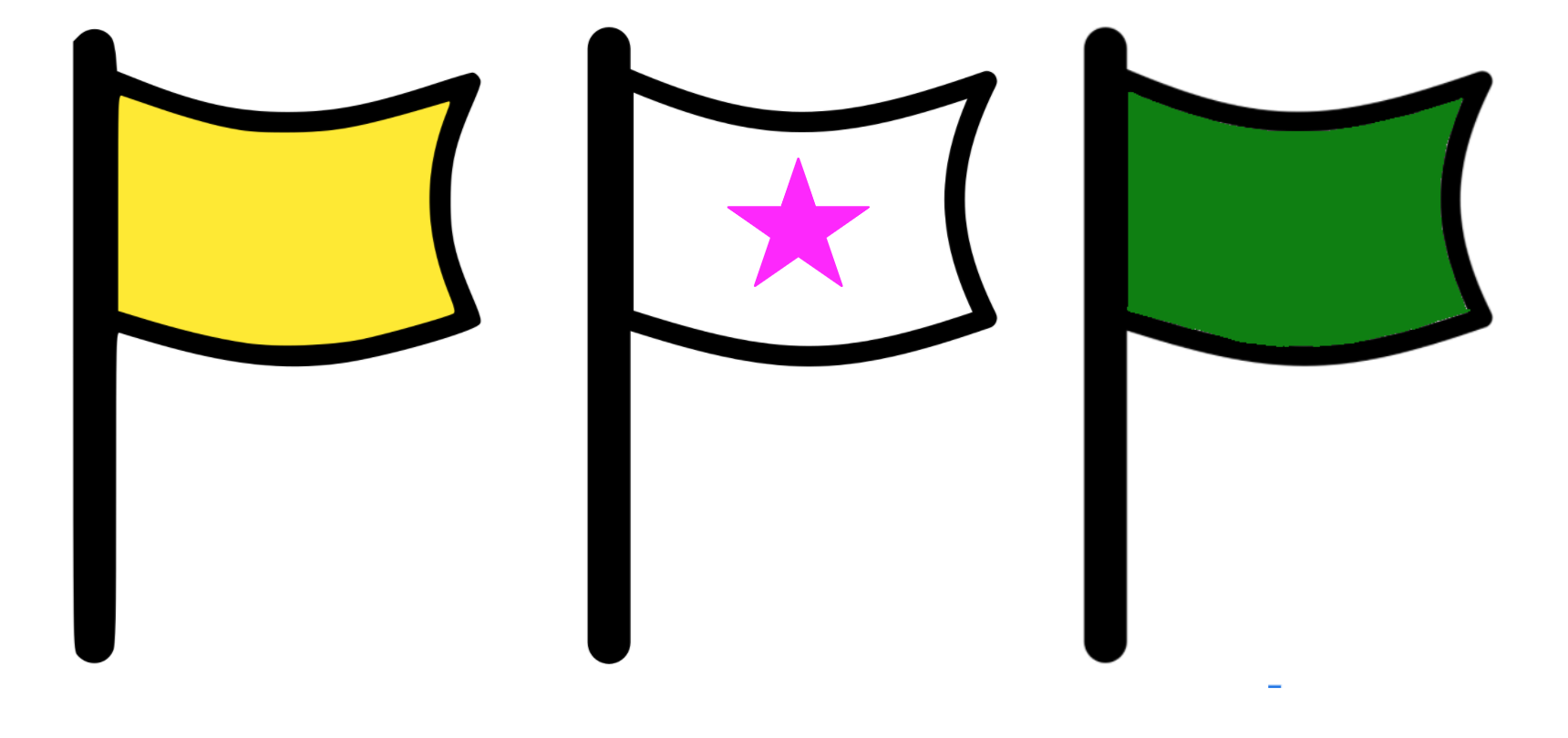
परीक्षण के लिए तैयार!
- पूछेंछात्रों से मंगल ग्रह के रोवर्स के बारे में पूछें ताकि उनकी परियोजनाएं वास्तविक रोवर्स से जुड़ सकें। उनके अनुसार रोवर्स में कौन से उपकरण हैं, जिनसे वे नमूने दफना सकते हैं? उनका क्या विचार है कि भविष्य के रोवर इस रोवर द्वारा दफनाए गए नमूनों को कैसे खोज पाएंगे और उजागर कर पाएंगे?