
ステップ 1: MAD Box のステップ 2: 12 歯および 36 歯のギア
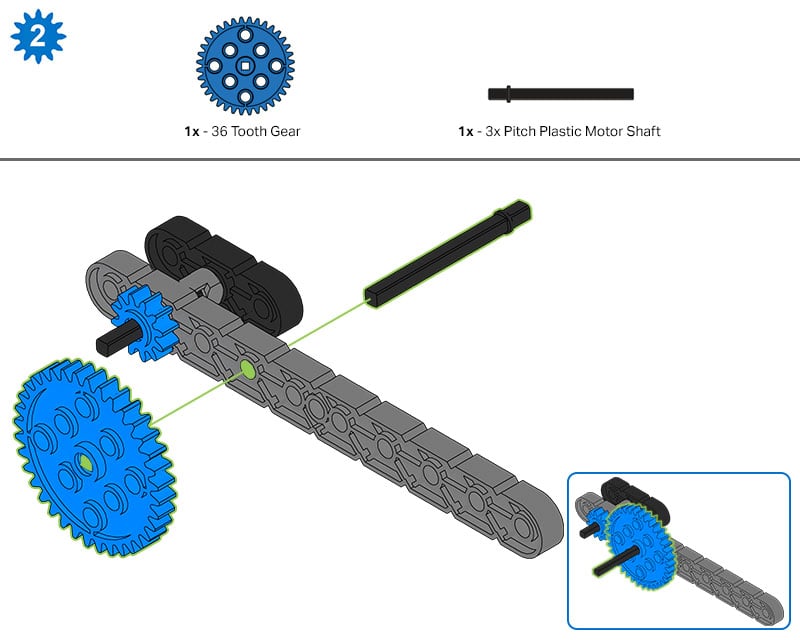
組み立て説明書のステップ 2 で、12 歯ギアはすでに MAD を接続するシャフト上にありました。 ビルドのその側にあるボックスのハンドル。
-
ビルド エキスパート、MAD のそっち側を見つけてください 箱に入れてチームメイトに見せましょう。 次に、ハンドルを回すとシャフトが 12 歯のギア (駆動ギア - 入力) を回転させ、それが次にビルドのこのステップで追加される 36 歯のギア (駆動ギア - 出力) を回転させることを示します。
-
この 2 つのギアのギア比は何ですか?
-
電卓、以下の方程式を計算し、レコーダーにチェックしてもらいます。

![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
グループ内の計算機とレコーダーは、計算が次のように完了する必要があることを認識する必要があります。
-
最初の分数は 36/12 である必要があります。
-
2 番目の分数は 3/1 である必要があります。
繰り返しますが、分子と分母の両方を同じ数で割って分数を減らす方法を生徒が理解できるようにします。
3:1 の比率は、36 歯のギアを 1 回転させるために、駆動する 12 歯のギアを 3 回転させる必要があることを示しています。
これにより、 トルクの機械的利点が生じます。 トルクとは何ですか?
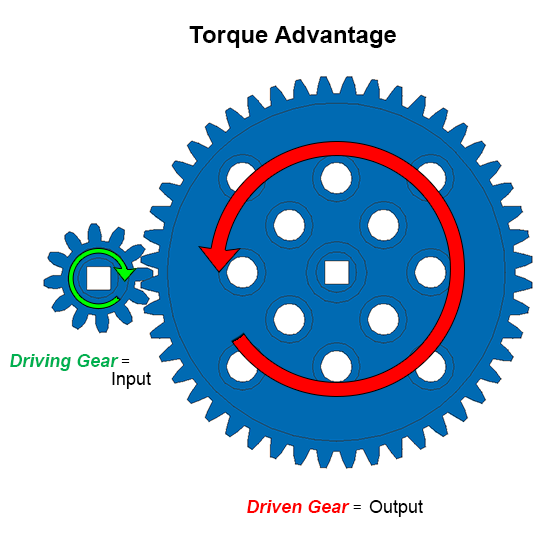
トルクは、被駆動ギアまたは機械の出力をより強力にする機械的な利点です。 この場合、MAD Box には出力の 3 倍の入力があり、より強力になりました。
-
記録者、MAD 内のトルクの機械的利点に関するメモをエンジニアリング ノートに必ず追加してください。 箱。
ステップ 2: MAD Box のステップ 10: 36 歯および 12 歯のギア
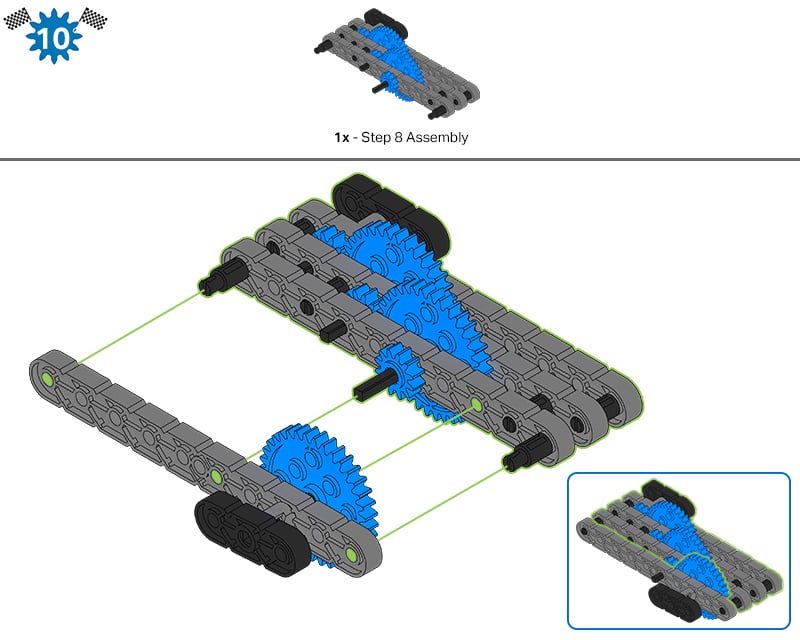
組み立て説明書のステップ 10 で、MAD の反対側 ボックスが接続されました。 ハンドル付きシャフトには36歯のギアがありました。
-
ビルド エキスパート、MAD のそっち側を見つけてください ボックスに入れてグループに見せます。 次に、ハンドルを回すとシャフトが 36 歯のギア (駆動ギア - 入力) を回転させ、それが次に 12 歯のギア (駆動ギア - 出力) を回転させることを示します。
-
この 2 つのギアのギア比は何ですか?
-
電卓は、以下の方程式を計算し、それをレコーダーにチェックさせます。

![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
グループ内の計算機とレコーダーは、計算が次のように完了する必要があることを認識する必要があります。
-
最初の部分は 12/36 である必要があります。
-
2 番目の端数は 1/3 である必要があります。
繰り返しますが、分子と分母の両方を同じ数で割って分数を減らす方法を生徒が理解できるようにします。
1:3 の比率は、駆動側の 36 歯ギアが 1 回転するだけで、12 歯ギアが 3 回転することを示しています。
これにより、速度 の機械的利点が得られます。
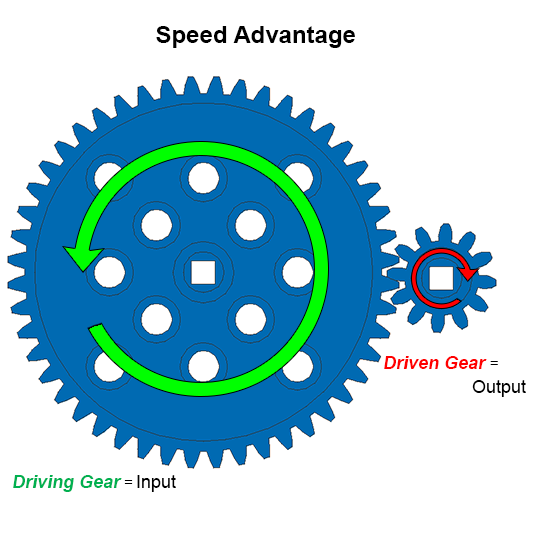
速度は、被駆動ギアまたは機械の出力を速くする機械的な利点です。 この場合、MAD Box は入力回転の 3 倍の出力を持ち、高速になります。
-
記録者、MAD 内での速度の機械的利点に関するメモをエンジニアリング ノートに必ず追加してください。 箱。
ステップ 3: MAD ボックスの複合ギア比
-
ビルド エキスパート、36 歯ギアに接続されているハンドルをゆっくりと回し、もう一方のハンドルがどのくらいの速さで回転するかをグループに観察させます。
-
記録者は、以下の説明を読んだ後、エンジニアリングノートで複合ギア比とは何かを説明してください。
12 歯ギアを回転させる 36 歯ギアのギア比は 1:3 で、速度の機械的利点が得られました。 しかし、36 歯ギアに接続されているハンドルを 1 回回すと、もう一方のハンドルは 3 回以上回転します。
それはMADだからです ボックスは 複合ギア比を使用します。 MAD Box の複合ギア比は、36 歯ギアと 12 歯ギアが同じシャフトを共有することによって作成されます。
複合ギア比は、機構内の速度またはトルクの機械的利点を何倍にも高めます。
![]() 教師のヒント
教師のヒント
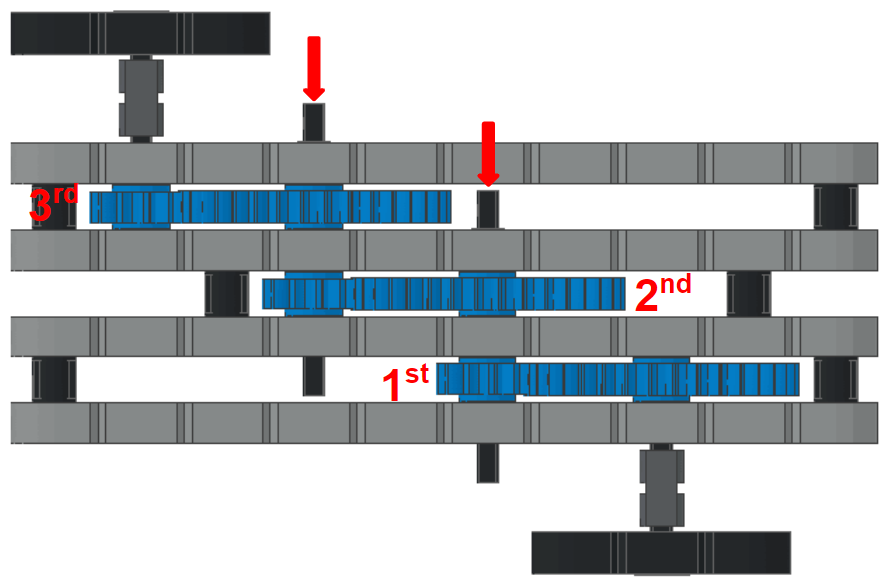
MAD の画像内のギア比のラベル 1st、2nd、3rd 上のボックスは、36 歯ギアに接続されたハンドルを回すことに基づいています。 画像の一番下にあるハンドルです。
上の画像の赤い矢印は、36 歯と 12 歯の両方のギアを備えたシャフトを示しています。 これらのシャフトは、1 速、2 速、3 速のギア比を相互に接続します。 シャフトが回転すると、シャフト上の 12 歯ギアと 36 歯ギアの両方が回転します。
これにより、各ギア比が複合ギア比に接続されるため、各ギア比によって生み出される機械的利点が倍増します。
MAD ボックスには 2 つの複合ギア比があり、どちらの側でも入力を与えることができるため、1 つはトルクの利点につながり、もう 1 つは速度の利点につながります。
MAD の片側の複合ギア比を計算するには ボックス、ビルド内の入力から出力までの 3 つのギア比を見つけて、それらを互いに乗算する必要があります。
-
ビルド エキスパート、MAD の側面を見つけてください 入力ハンドルが 36 歯の歯車を回すボックスを作成し、グループに見せます。 ヒント: 上の画像の下部にあるハンドルです。 ビルド内で 3 つのギア比がどこにあるかを確認するために指摘してください。
-
すべての駆動ギアは 36 歯のギアであり、すべての従動ギアは 12 歯のギアであることに注意してください。
-
電卓とレコーダー、以下の方程式を完成させて確認してください。

-
チーム全体が次の質問に答えるように努める必要があります: 1:27 の複合ギア比は何を意味しますか? 36歯ギアのハンドルを1回回すと、もう一方のハンドルは何回転すればよいでしょうか?
-
記録者はチームの最良の回答を整理し、エンジニアリング ノートに書き込む必要があります。
![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
グループ内の計算機とレコーダーは、計算が次のように完了する必要があることを認識する必要があります。
-
1 速ギア比の不足分数は 1/3 です。
-
セカンド ギア比で不足している端数は 12/36 と 1/3 です。
-
3 速ギア比で不足している分数は 12/36 です。
複合ギア比の計算式は、生徒たちが完成したものを見るのが初めてだったので提供されました。
1:27 の比率は、最初の 36 歯のギアが 1 回転するたびに、最後の 12 歯のギア (出力ハンドルに最も近いギア) が 27 回回転することを意味します。 これは、速度に関して機械的な利点があることを示しています。
学生に 36 歯ギアのハンドルを適切なペースで回してもらい、出力ハンドルがどれだけ早く回転するかに注目してもらい、速度による機械的利点を強調します。 数学的には、出力ハンドルは入力ハンドルの 27 倍の速さで回転します。
ステップ 4: MAD ボックスのトルクのための複合ギア比
-
ビルド エキスパート、MAD の側面を見つけてください 入力ハンドルが 12 歯の歯車を回転させるボックスを作成し、グループに見せます。 ヒント: MAD の反対側です 上で使用したのと同じボックス。 この入力ハンドルを使用する場合、駆動ギアはすべて 12 歯ギアであり、従動ギアはすべて 36 歯ギアであることに注意してください。
-
電卓とレコーダー、以下の方程式を完成させて確認してください。

-
チーム全体で次の質問に答える必要があります: 複合ギア比とは何ですか? それは何を意味しますか? 12 歯のギアのハンドルを 1 回回すには、もう一方のハンドルを何回回す必要がありますか?
-
記録者はチームの最良の回答を整理し、エンジニアリング ノートに書き込む必要があります。
![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
グループ内の計算機とレコーダーは、計算が次のように完了する必要があることを認識する必要があります。
-
第 1 ギア比で不足している分数は 3/1 です。
-
セカンド ギア比で不足している端数は 36/12 と 3/1 です。
-
3 速ギア比で不足している部分は 36/12 です。
複合ギア比の計算式には 3/1 と 3/1 が欠落しており、結果は 27/1 となり、複合ギア比は 27:1 となります。
27:1 の比率は、最後の 36 歯ギア (出力ハンドルに最も近い歯車) が 1 回転するためには、最初の 12 歯ギアが 27 回転する必要があることを意味します。 これは、トルクに機械的な利点があることを示しています。
生徒に、12 歯ギアを使用してハンドルを適度なペースで回し、出力ハンドルが回転するときの力を感じてもらい、トルクの機械的利点を強調します。 数学的には、出力ハンドルは入力ハンドルの 27 回転の力で回転します。
ステップ 5: MAD について考える ボックスのデザイン
なぜMADではないのか ボックスの 6 つのギアはすべて 1 列に並んでいますか?
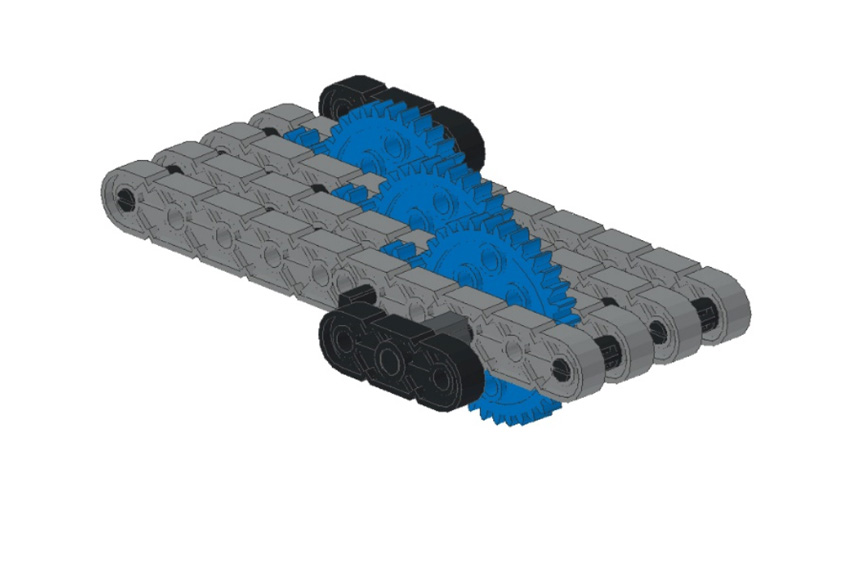
すべての歯車が一列に噛み合う設計は、 歯車列と呼ばれます。 上の画像は MAD を示しています 歯車列としてのボックスの歯車。
このようなギアトレインにはギア比が 1 つしかなく、複合ギア比は ではなく です。 最初のギアが駆動ギアであるか最後のギアが駆動ギアであるかに応じて、比率は 1:3 または 3:1 になります。 この歯車列の最初と最後の歯車のサイズのみが歯車比に関係します。
最初のギアと最後のギアの間にあるギアは、 アイドラーギアと呼ばれます。 パワーやスピードは向上しません。 アイドラギアは回転方向を変えるだけです。
なぜMADではなかったのか 小さなギアと 27 倍の歯数のギアの 2 つのギアだけで設計されたボックス?
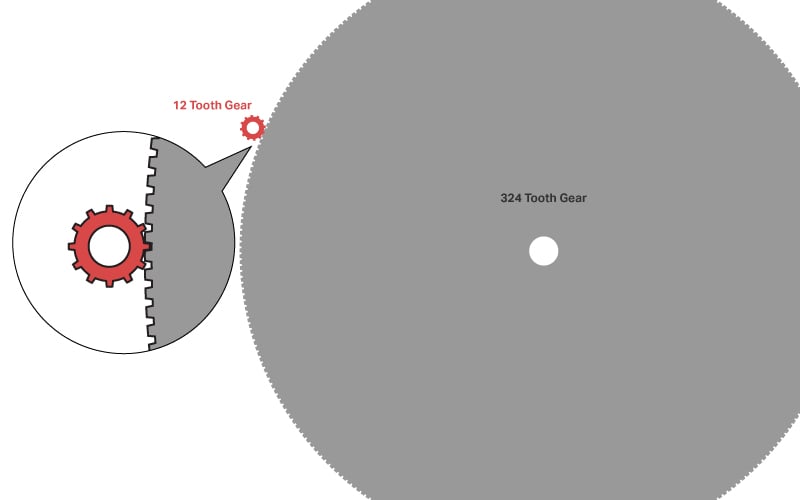
MADの複合ギア比 ボックスは 1:27 または 27:1 です。 なぜ 12 歯ギアと 324 歯ギアの 2 つのギアだけを使用して設計しなかったのか疑問に思われるかもしれません。 そうすれば、ギア比は 1:27 または 27:1 になります。

MAD が発生する理由は 2 つあります。 ボックスは 324 歯のギアを使用して設計されていませんでした。
第一の理由は、VEX プラスチック 324 歯ギアが存在しないことです。 キット内の最大のギアは 60 歯ギアです。 エンジニアがビルドを設計するときは、利用可能な材料を考慮する必要がありますが、324 歯のギアは利用できませんでした。
2 番目の理由は、324 歯のギアが利用可能であれば、非常に大きくなるということです。 そのサイズのギアを使用すると、ビルドの扱いが難しくなります。 複合ギア比は、ハンドヘルド デバイスの設計に適しています。 エンジニアがビルドを設計するときは、消費者がデバイスをどのように使用するかを考慮する必要があります。
![]() 議論を促す
-
まとめ
議論を促す
-
まとめ
学生は、ロボットの設計にとってギア比がどのように重要であるかを理解して、この STEM ラボを終了する必要があります。 つまり、特定のギア比は、動力を伝達したり、ロボットの部品にトルクや速度の機械的利点を生み出すために使用されます。 まずは次のディスカッションから始めてください。
質問: 速度の機械的利点を得るには、駆動ギアと従動ギアのどちらが大きいですか?
回答: 速度を生み出すとき、駆動ギアは従動ギアよりも大きくなります。
質問: ロボットの速度を上げたいのはなぜですか?
回答: そうすれば、ロボットは可能な限り速く移動して動作することができます。
質問: ロボットのトルクを増加させたいのはなぜでしょうか? ヒント:
可動部分を考慮してください。
A: ロボットは重いか、重い物を移動する必要がある可能性があります。 ドライブトレイン
(ホイールベース) のトルクが増加すると、動きやすくなります。 爪やアームのトルクが増加し、重い物体を持ち上げるのに役立ちます。
質問: 歯数の差が大きい 2
つのギアを使用する代わりに、複合ギア比を使用するのはなぜですか?
回答: ギア比が非常に大きいため、ビルドにそのサイズのギアを含めることができません。
そのギア比を生み出すために必要なサイズのギアさえ存在しない可能性があります。
したがって、複合ギア比は、エンジニアが必要なスペースを最小限に抑えながら、より大きな機械的利点を生み出すのに役立ちます。
質問: ビルドにギアトレインを含める理由は何ですか?
トルクや速度は増加しますか?
A: ギアトレインは動力の伝達に役立ちますが、トレインの最後の駆動ギアと従動ギアの比率以上にトルクや速度は増加しません。
学生は、トルクまたは速度を考慮した競技用ロボットの設計に関する応用セクションのページでこれについて再び考えます。 さらに詳しい情報については、 シンプルなギア比の使用方法に関する VEX ライブラリの記事があります。 この記事は VEX V5 ロボットのコンテキスト内で書かれていますが、その概念は VEX IQ ロボットの設計にも当てはまります。