
M.A.D. Box's Gears
1단계: M.A.D. Box의 2단계: 12 및 36 톱니 기어
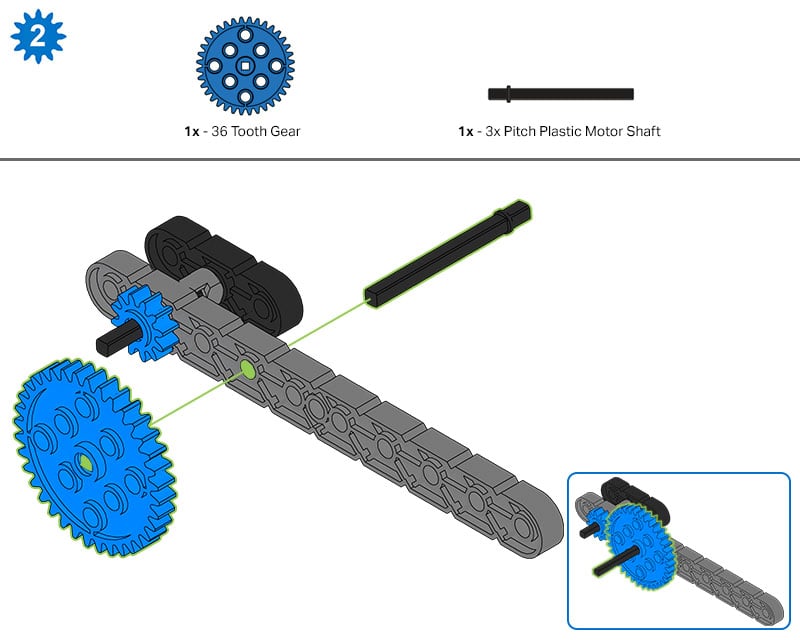
빌드 지침의 2단계에서 12 톱니 기어는 M.A.D. 를 연결하는 축에 이미 있었습니다. 빌드 저쪽에 있는 박스의 손잡이.
- 전문가를 구축하고 M.A.D. 의 해당 측면을 찾으십시오. 상자에 넣어 팀원들에게 보여주세요. 그런 다음 핸들을 돌리면 샤프트가 12 톱니 기어 (구동 기어 - 입력) 를 돌리고 빌드의 이 단계에서 추가되는 36 톱니 기어 (구동 기어 - 출력) 를 돌립니다.
- 이 두 기어의 기어 비율은 얼마입니까?
- 계산기, 아래의 방정식을 구하고 Recorder가 확인하도록 하십시오.

![]() 교사 도구 상자
-
솔루션
교사 도구 상자
-
솔루션
그룹의 Calculator 및 Recorder는 다음과 같이 계산을 완료해야 함을 인식해야 합니다.
-
첫 번째 분수는 36/12가 되어야 합니다.
-
두 번째 분수는 3/1이어야 합니다.
다시 한 번, 분자와 분모를 같은 숫자로 다이빙하여 분수를 줄이는 방법을 학생들이 이해하도록 하십시오.
3: 1 비율은 36 톱니 기어를 한 번 돌리기 위해 주행 12 톱니 기어가 세 번 회전해야 함을 나타냅니다.
이는 토크의 기계적 이점으로 이어집니다. 토크란 무엇인가요?
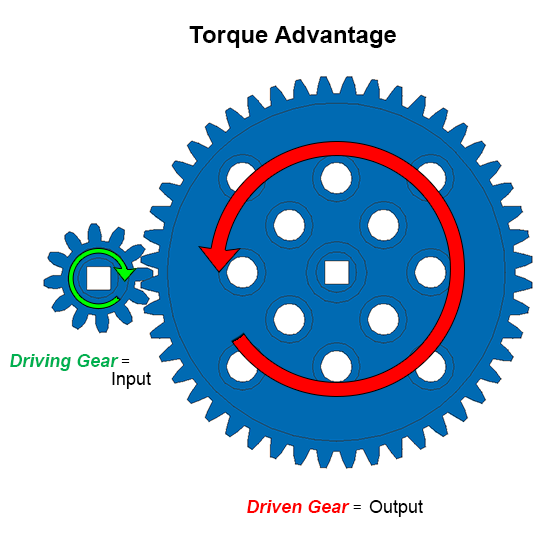
토크는 구동 기어 또는 기계의 출력을 더 강력하게 만드는 기계적 장점입니다. 이 경우 M.A.D. Box에는 출력의 3배에 달하는 입력이 있어 더 강력합니다.
- 레코더, M.A.D. 내에서 토크의 기계적 이점에 대한 메모를 엔지니어링 노트에 추가하십시오. Box.
2단계: M.A.D. Box의 10단계: 36 및 12 톱니 기어
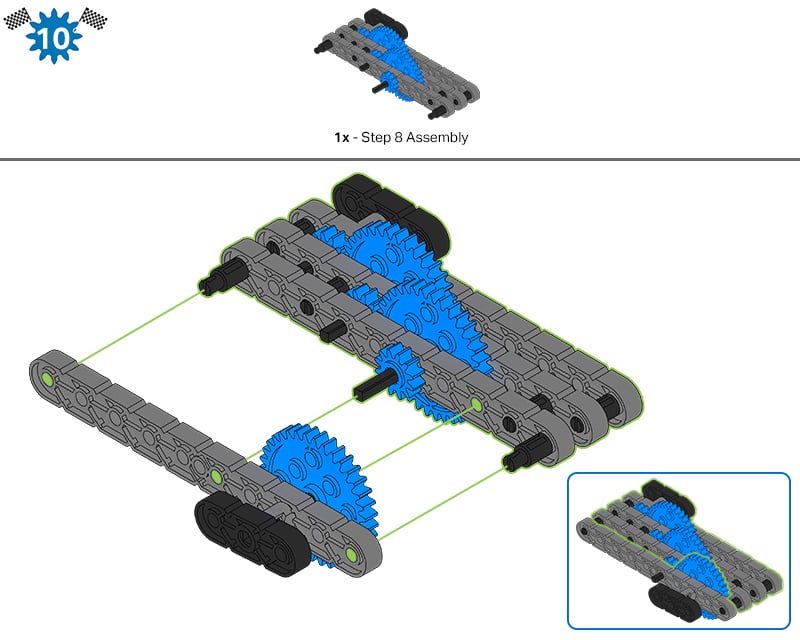
빌드 지침의 10단계에서 M.A.D. 의 반대편 Box가 연결되었습니다. 손잡이가 달린 36 톱니 기어가 샤프트에 있었습니다.
- 전문가를 구축하고 M.A.D. 의 해당 측면을 찾으십시오. 상자에 담아 그룹에게 보여주세요. 그런 다음 핸들을 돌리면 샤프트가 36 톱니 기어 (운전 기어 - 입력) 를 돌리고 12 톱니 기어 (구동 기어 - 출력) 를 돌립니다.
- 이 두 기어의 기어 비율은 얼마입니까?
- 계산기를 사용하여 아래의 방정식을 구한 다음 Recorder가 확인하도록 하십시오.

![]() 교사 도구 상자
-
솔루션
교사 도구 상자
-
솔루션
그룹의 Calculator 및 Recorder는 다음과 같이 계산을 완료해야 함을 인식해야 합니다.
-
첫 번째 분율은 12/36이어야 합니다.
-
두 번째 분수는 1/3이어야 합니다.
다시 한 번, 분자와 분모를 같은 숫자로 다이빙하여 분수를 줄이는 방법을 학생들이 이해하도록 하십시오.
1: 3 비율은 주행 36 톱니 기어가 12 톱니 기어를 세 번 돌리기 위해 한 번만 돌리면 된다는 것을 알려줍니다.
이는 속도의 기계적 이점으로 이어집니다.
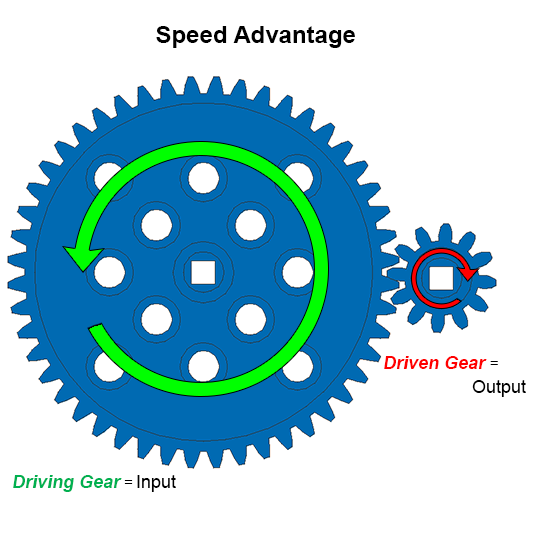
속도는 구동 기어 또는 기계의 출력을 더 빠르게 만드는 기계적 이점입니다. 이 경우 M.A.D. Box의 출력은 입력 회전의 3배로 빨라집니다.
- 레코더, M.A.D. 내에서 속도의 기계적 이점에 대한 메모를 엔지니어링 노트에 추가하십시오. Box.
3단계: M.A.D. 상자의 컴파운드 기어 비율
- 전문가를 만들고 36 톱니 기어에 연결된 손잡이를 천천히 돌리고 다른 손잡이가 얼마나 빨리 회전하는지 그룹이 지켜보도록 하십시오.
- 레코더, 아래 설명을 읽은 후 엔지니어링 노트에 있는 복합 기어비가 무엇인지 설명하십시오.
12 톱니 기어를 돌리는 36 톱니 기어의 기어 비율은 속도의 기계적 이점으로 1: 3이었다. 하지만 36 톱니 기어에 연결된 핸들을 한 번 돌리면 다른 핸들은 세 번 이상 회전합니다.
그 이유는 M.A.D. 상자는 복합 기어 비율을 사용합니다. M.A.D. BOX의 컴파운드 기어 비율은 36개의 톱니 기어와 12개의 톱니 기어가 동일한 샤프트를 공유함으로써 생성됩니다.
복합 기어비는 메커니즘 내에서 속도 또는 토크의 기계적 이점을 배가합니다.
![]() 교사 팁
교사 팁
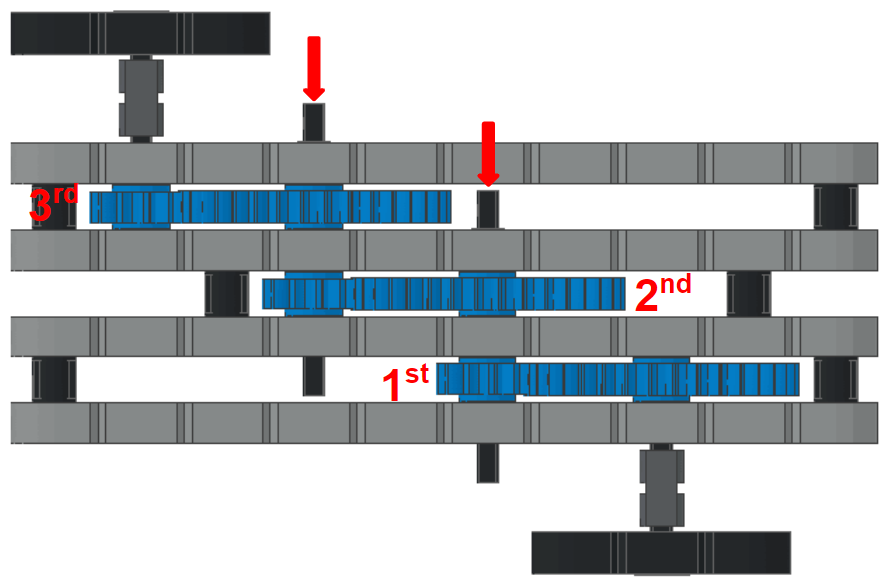
M.A.D. 이미지의 기어 비율에 대한 첫 번째, 두 번째 및 세 번째 라벨 위의 상자는 36 톱니 기어에 연결된 핸들을 돌리는 것을 기반으로 합니다. 이미지 하단의 핸들입니다.
위 이미지의 빨간색 화살표는 36개의 톱니와 12개의 톱니 기어가 있는 샤프트를 보여줍니다. 이러한 샤프트는 첫 번째, 두 번째 및 세 번째 기어비를 서로 연결합니다. 샤프트가 회전하면 샤프트에 있는 12개의 톱니와 36개의 톱니 기어가 모두 회전합니다.
이렇게 하면 각 기어비가 복합 기어비로 연결되기 때문에 기계적 이점이 배가됩니다.
M.A.D. 박스는 양쪽에 입력할 수 있기 때문에 두 개의 복합 기어 비율이 있습니다. 하나는 토크 이점으로 이어지고 다른 하나는 속도 이점으로 이어집니다. M.A.D. 의 한쪽에서 컴파운드 기어비를
계산하려면 상자에서 입력에서 출력까지 빌드에서 세 개의 기어 비율을 찾은 다음 서로 곱해야 합니다.
- 전문가를 구축하고 M.A.D. 의 측면을 찾으십시오. 입력 핸들이 36 톱니 기어를 돌리고 그룹에 표시하는 상자. 힌트: 위 이미지 하단의 손잡이입니다. 빌드에서 세 개의 기어비가 어디에 있는지 검토합니다.
- 모든 구동 기어는 36개의 톱니 기어이고 모든 구동 기어는 12개의 톱니 기어입니다.
- 계산기 및 레코더, 아래 방정식을 완료하고 확인하십시오:

- 팀 전체가 다음 질문에 답해야 합니다. 1:27 복합 기어 비율은 무엇을 의미하나요? 36 톱니 기어가 있는 손잡이를 한 번 돌리면 다른 손잡이는 몇 번 돌려야 합니까?
- 레코더는 팀의 최선의 답변을 정리하고 엔지니어링 노트에 작성해야 합니다.
![]() 교사 도구 상자
-
솔루션
교사 도구 상자
-
솔루션
그룹의 Calculator 및 Recorder는 다음과 같이 계산을 완료해야 함을 인식해야 합니다.
-
첫 번째 기어 비율에서 누락된 비율은 1/3입니다.
-
세컨드 기어 비율에서 누락된 분수는 12/36 및 1/3입니다.
-
세 번째 기어 비율에서 누락된 비율은 12/36입니다.
Compound Gear Ratio 계산을 위한 방정식은 학생들이 처음으로 완성된 것을 보았기 때문에 제공되었다.
1:27 비율은 처음 36개의 톱니 기어가 한 번의 전체 회전을 완료할 때마다 마지막 12개의 톱니 기어 (출력 핸들에 가장 가까운 것) 가 27번 회전한다는 것을 의미합니다. 이는 속도의 기계적 이점이 있음을 나타냅니다.
36 톱니 기어로 핸들을 합리적인 속도로 돌리고 출력 핸들이 얼마나 빨리 회전하는지 확인하도록 요청하여 학생들에게 속도의 기계적 이점을 강조하십시오. 수학적으로 출력 핸들은 입력 핸들보다 27배 빠르게 회전합니다!
4단계: M.A.D. 토크에 대한 상자의 컴파운드 기어 비율
- 전문가를 구축하고 M.A.D. 의 측면을 찾으십시오. 입력 핸들이 12 톱니 기어를 돌리고 그룹에 표시하는 상자. 힌트: M.A.D. 의 반대면입니다. 위에서 사용하던 상자. 이 입력 핸들을 사용할 때 모든 구동 기어는 12 톱니 기어이고 모든 구동 기어는 36 톱니 기어입니다.
- 계산기 및 레코더, 아래 방정식을 완료하고 확인하십시오:

- 팀 전체가 다음 질문에 답해야 합니다. 복합 기어 비율은 무엇이며 어떤 의미인가요? 다른 핸들을 한 번 돌리기 위해 12 톱니 기어로 핸들을 몇 번이나 돌리십니까?
- 레코더는 팀의 최선의 답변을 정리하고 엔지니어링 노트에 작성해야 합니다.
![]() 교사 도구 상자
-
솔루션
교사 도구 상자
-
솔루션
그룹의 Calculator 및 Recorder는 다음과 같이 계산을 완료해야 함을 인식해야 합니다.
-
첫 번째 기어 비율에서 누락된 비율은 3/1입니다.
-
세컨드 기어 비율에서 누락된 분수는 36/12 및 3/1입니다.
-
세 번째 기어 비율에서 누락된 비율은 36/12입니다.
화합물 기어 비율 계산에 대한 방정식은 3/1 및 3/1이 누락되어 27/1이 되고 화합물 기어 비율은 27: 1이 됩니다.
27: 1 비율은 마지막 36개의 톱니 기어 (출력 핸들에 가장 가까운 톱니 기어) 가 하나의 전체 회전을 회전하려면 처음 12개의 톱니 기어가 27개의 전체 회전을 완료해야 함을 의미합니다. 이는 토크의 기계적 이점이 있음을 나타냅니다.
12 톱니 기어로 핸들을 합리적인 속도로 돌리고 회전할 때 출력 핸들의 힘을 느껴보라고 요청하여 학생들에게 토크의 기계적 장점을 강조하십시오. 수학적으로, 출력 핸들은 입력 핸들의 27 턴의 힘으로 회전합니다!
5단계: M.A.D. 에 대해 생각하기 Box의 디자인
M.A.D. 는 왜 안되나요? 박스의 6개의 기어가 모두 한 줄로 되어 있나요?
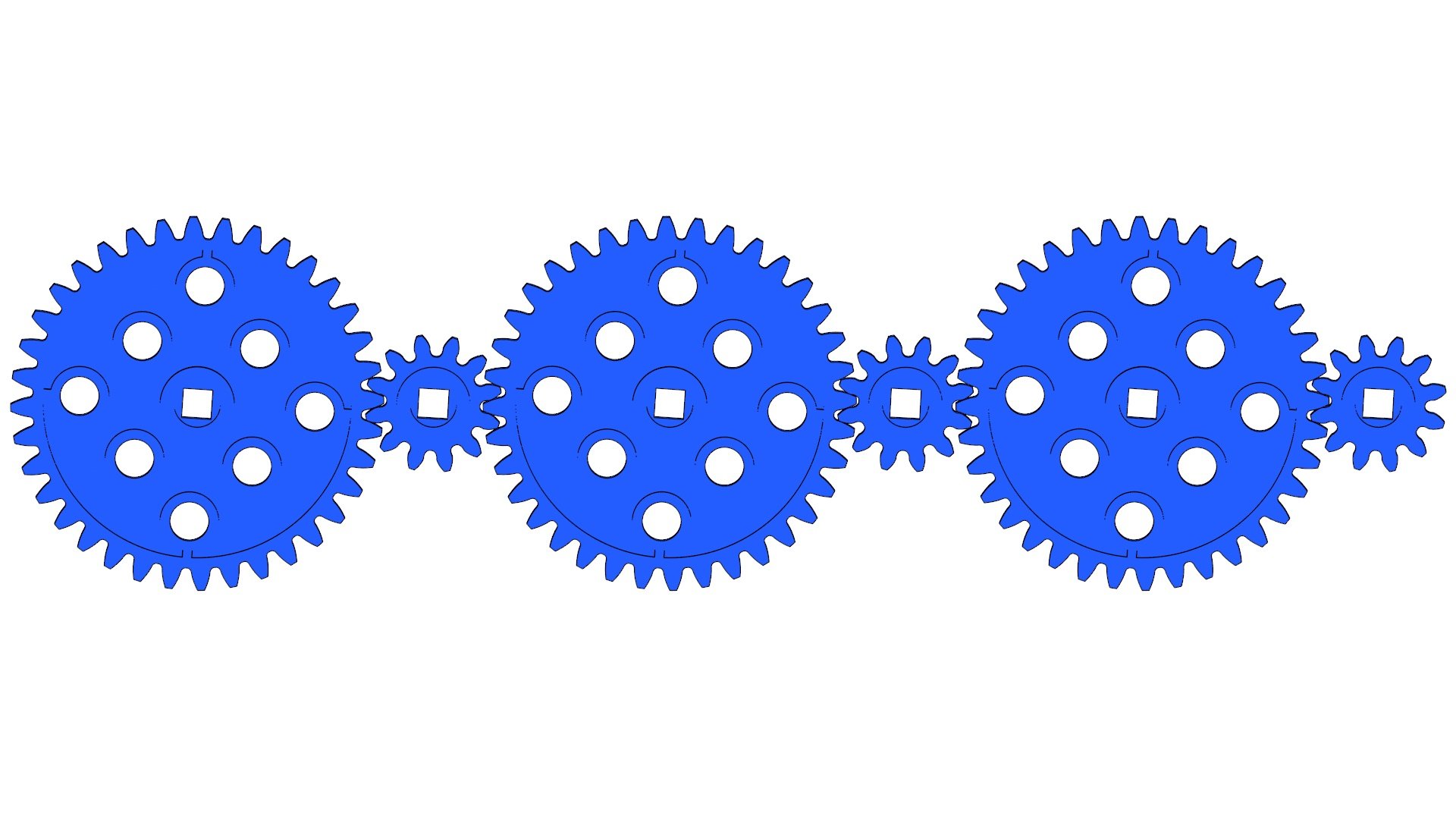
모든 기어가 일직선으로 맞물리는 디자인을 기어 트레인이라고 합니다. 위의 이미지는 M.A.D. 를 보여줍니다. 박스의 기어를 기어 트레인으로 사용하세요.
이와 같은 기어 열차는 하나의 기어 비율만 가지고 있으며 복합 기어 비율이 아닙니다. 비율은 첫 번째 또는 마지막 기어가 운전 기어인지 여부에 따라 1: 3 또는 3: 1입니다. 이 기어 트레인의 첫 번째 기어와 마지막 기어의 크기만 기어 비율에 따라 달라집니다. 첫
번째 기어와 마지막 기어 사이의 기어를 아이들러 기어라고합니다. 그들은 힘이나 속도를 증가시키지 않습니다. 아이들러 기어는 회전 방향만 변경합니다.
왜 M.A.D. 가 아니었을까요? 작은 기어와 27배 더 많은 톱니가 있는 기어라는 두 개의 기어로만 설계된 상자?
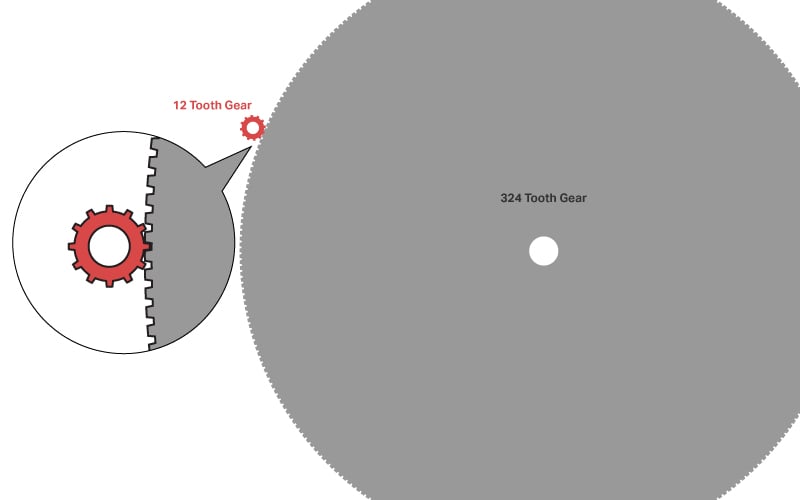
M.A.D. 의 컴파운드 기어 비율 Box는 1:27 또는 27: 1입니다. 왜 12 톱니 기어와 324 톱니 기어라는 두 개의 기어로만 설계되지 않았는지 궁금하실 것입니다. 그러면 1:27 또는 27: 1의 기어비가 됩니다.

M.A.D. 에는 두 가지 이유가 있습니다. 상자는 324 톱니 기어로 설계되지 않았습니다. 첫
번째 이유는 VEX 플라스틱 324 톱니 기어가 존재하지 않기 때문입니다. 키트에서 가장 큰 기어는 60 톱니 기어입니다. 엔지니어가 빌드를 설계할 때 사용할 수 있는 재료를 고려해야 하며 324 톱니 기어를 사용할 수 없었습니다. 두
번째 이유는 사용 가능한 경우 324 톱니 기어가 매우 크기 때문입니다. 그 크기의 기어는 빌드를 다루기 어렵게 만듭니다. 컴파운드 기어비는 핸드헬드 장치를 설계하는 데 더 적합합니다. 엔지니어가 빌드를 설계할 때 소비자가 장치를 어떻게 사용할지 고려해야 합니다.
![]() 토론 동기 부여
-
요약
토론 동기 부여
-
요약
학생들은 기어비가 로봇 설계에 어떻게 중요한지 이해하면서 이 STEM 실험실을 완료해야 합니다. 요컨대, 주어진 기어비는 전달력 또는 로봇 부품의 토크 또는 속도 기계적 이점을 창출하는 데 사용됩니다. 이 토론으로 시작하세요.
질문: 속도의 기계적 이점을 얻기 위해 구동 기어 또는 구동 기어 중 더 큰 것은 무엇입니까?
A : 속도를 낼 때 구동 기어가 구동 기어보다 큽니다.
질문: 로봇의 속도를 높이고 싶은 이유는 무엇인가요?
A: 그러면 로봇이 최대한 빨리 움직이고 작동할 수 있습니다.
질문: 로봇의 토크를 높이고 싶은 이유는 무엇인가요? 힌트: 움직이는 부분을 고려하십시오.
답변: 로봇이 무겁거나 무거운 물체를 움직여야 할 수 있습니다. 구동계 (휠베이스) 의 토크가 증가하면 움직이는 데 도움이 됩니다. 발톱이나 팔의 토크가 증가하면 무거운 물체를 들어 올리는 데 도움이 될 수 있습니다.
Q: 톱니 수의 차이가 큰 두 개의 기어를 사용하는 대신 복합 기어비를 사용하는 이유는 무엇입니까?
답변: 일부 기어 비율이 너무 커서 빌드에 해당 크기의 기어가 있을 수 없습니다. 기어비를 만드는 데 필요한 크기의 기어가 없을 수도 있습니다. 따라서 복합 기어비는 엔지니어가 필요한 공간을 최소화하면서 더 큰 기계적 이점을 창출하는 데 도움이 됩니다.
질문: 빌드에 기어 트레인을 포함해야 하는 이유는 무엇인가요? 토크가 증가하나요? 아니면 속도가 증가하나요?
A: 기어 트레인은 동력을 전달하는 데 도움이 되지만 열차의 엔딩 드라이빙과 구동 기어 사이의 비율보다 더 큰 토크나 속도를 증가시키지 않습니다.
학생들은 토크 또는 속도를 위한 경쟁 로봇 설계에 대한 적용 섹션의 페이지에서 이에 대해 다시 생각하게 됩니다. 자세한 내용은 간단한 장비 비율 사용 방법에 대한 VEX 라이브러리 기사를 참조하십시오. 이 기사는 VEX V5 로봇의 맥락에서 작성되었지만 개념은 VEX IQ 로봇 디자인에도 적용됩니다.