
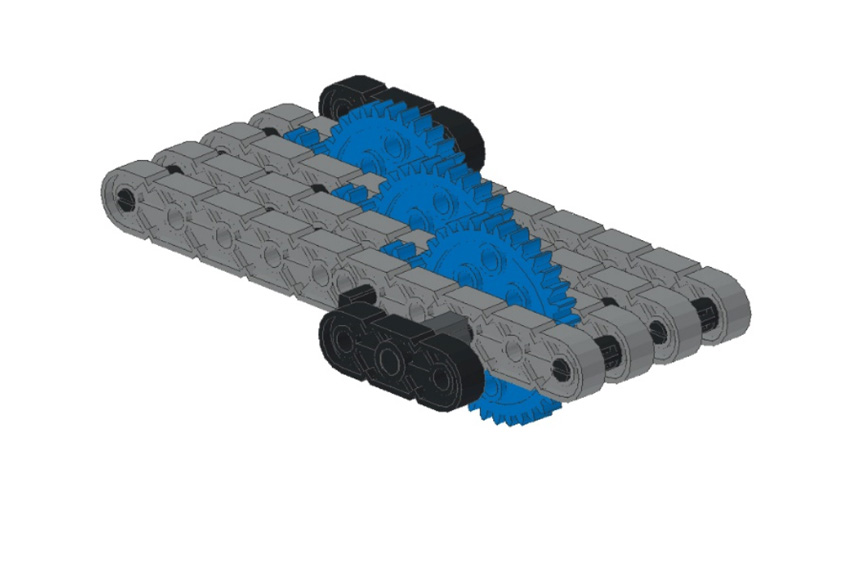
第一步:疯狂 盒子的步骤 2:12 和 36 齿齿轮
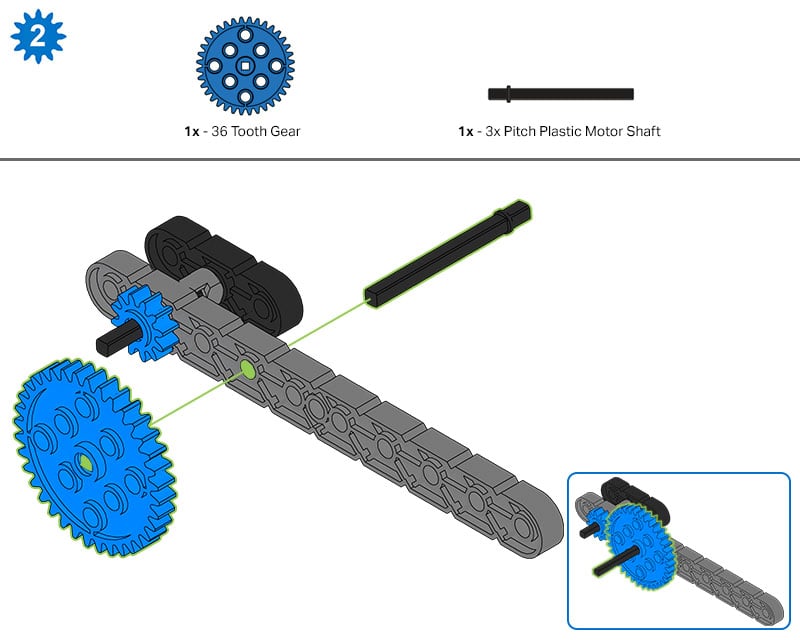
在构建说明的步骤 2 中,12 齿齿轮已经位于连接 MAD 的轴上 盒子的手柄位于构建的那一侧。
-
打造专家,找到MAD的那一面 装箱并向您的队友展示。 然后演示当转动手柄时,轴转动 12 齿齿轮(主动齿轮 - 输入),然后转动 36 齿齿轮(从动齿轮 - 输出),该齿轮在构建的此步骤中添加。
-
这两个齿轮的传动比是多少?
-
计算器,算出下面的等式,并让记录器检查它。

![]() 教师工具箱
-
解决方案
教师工具箱
-
解决方案
小组中的计算器和记录员应认识到计算应按如下方式完成:
-
第一个分数应为 36/12。
-
第二个分数应为 3/1。
再次确保学生了解如何通过将分子和分母除以相同的数字来减少分数。
3:1 的比例告诉我们,驱动 12 齿齿轮需要转动三圈才能转动 36 齿齿轮一次。0
会带来 扭矩的机械优势。 什么是扭矩?
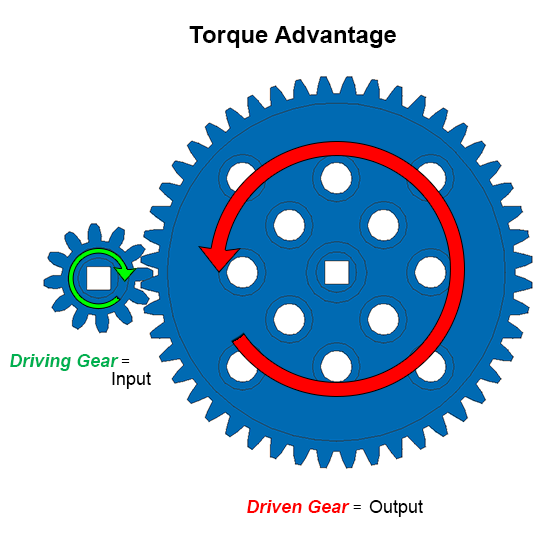
扭矩是一种机械优势,可以使从动齿轮或机器的输出更加强大。 在这种情况下,MAD Box 的输入量是输出量的三倍,这使得它更加强大。
-
记录员,请务必在工程笔记本中添加有关 MAD 中扭矩的机械优势的注释 盒子。
第 2 步:疯狂 盒子的步骤 10:36 和 12 齿齿轮
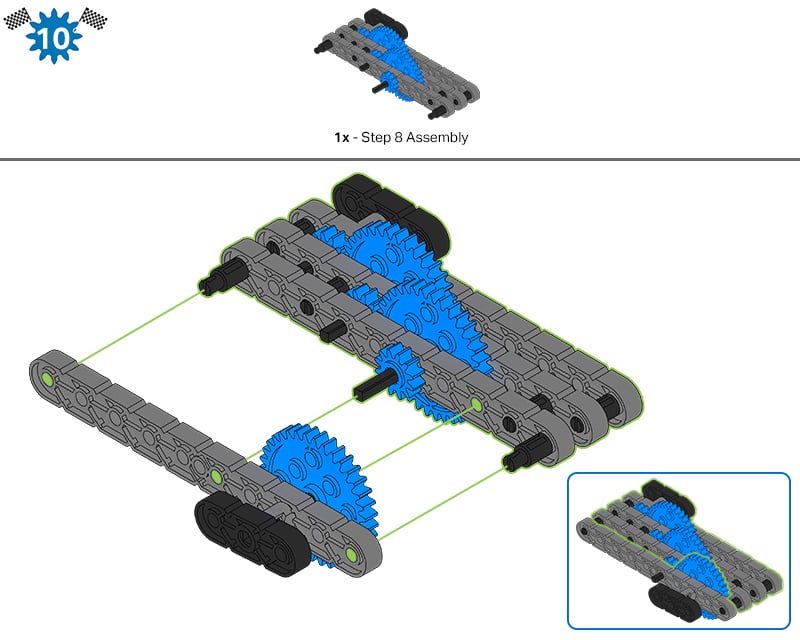
在构建说明的第 10 步中,MAD 的另一侧 盒子已连接。 它在带有手柄的轴上有一个 36 齿齿轮。
-
打造专家,找到MAD的那一面 装箱并向小组展示。 然后演示当转动手柄时,轴转动 36 齿齿轮(主动齿轮 - 输入),然后转动 12 齿齿轮(从动齿轮 - 输出)。
-
这两个齿轮的传动比是多少?
-
计算器,算出下面的等式,然后让记录器检查它。

![]() 教师工具箱
-
解决方案
教师工具箱
-
解决方案
小组中的计算器和记录员应认识到计算应按如下方式完成:
-
第一个分数应为 12/36。
-
第二个分数应该是 1/3。
再次确保学生了解如何通过将分子和分母除以相同的数字来减少分数。
1:3 的比例告诉我们,驱动 36 齿齿轮只需转动一次,即可使 12 齿齿轮转动三次。0
带来了 速度的机械优势。
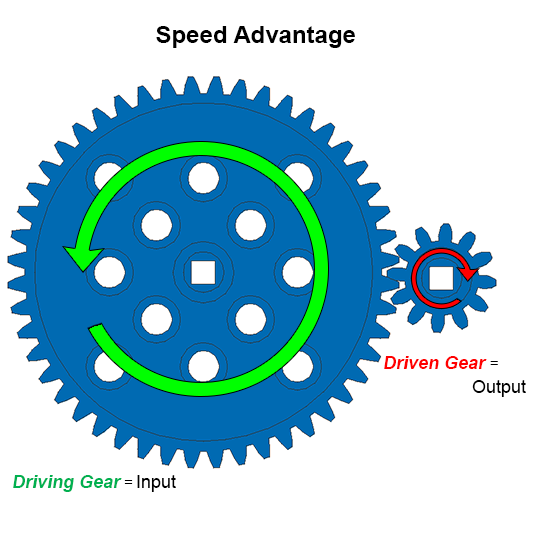
速度是一种机械优势,可以使从动齿轮或机器的输出更快。 在这种情况下,MAD Box 的输出是输入旋转的三倍,这使得它更快。
-
记录员,请务必在工程笔记本中添加有关 MAD 中速度的机械优势的注释 盒子。
第三步:疯狂 Box 的复合齿轮比
-
构建专家,缓慢转动连接到 36 齿齿轮的手柄,让小组观察另一个手柄转动的速度。
-
记录员,读完下面的描述后,在工程笔记本上解释一下什么是复合齿轮比。
36齿齿轮转动12齿齿轮的传动比为1:3,具有速度的机械优势。 但当你转动连接到36齿齿轮的手柄一次时,另一个手柄转动了三倍以上。
那是因为MAD 变速箱采用 复合齿轮比。 疯子 Box 的复合齿轮比是通过 36 个齿轮和 12 个齿轮共享同一轴而产生的。
复合齿轮比使机构内的速度或扭矩的机械优势倍增。
![]() 教师提示
教师提示
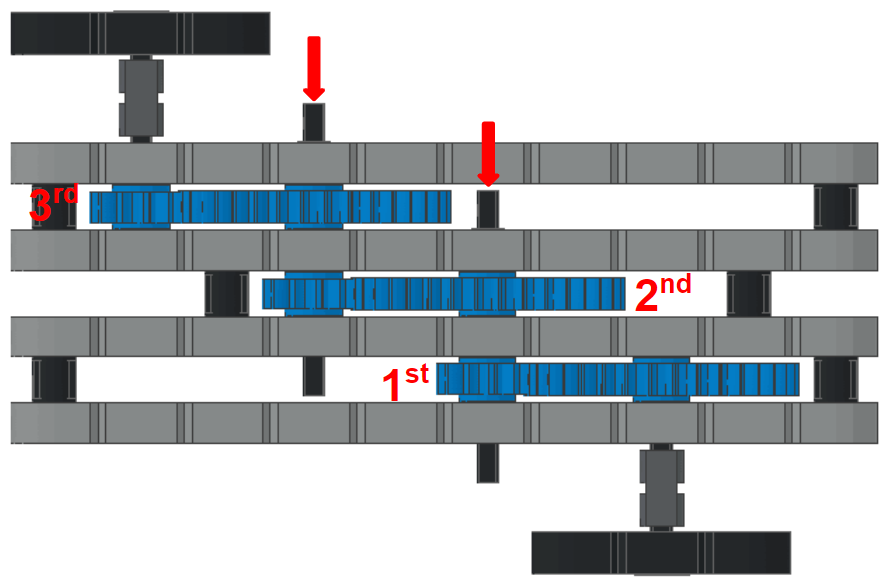
MAD 图像中齿轮比的标签 1st、2nd 和 3rd 上面的盒子是基于转动连接到 36 齿齿轮的手柄。 那是图像底部的手柄。
上图中的红色箭头显示了轴上同时有 36 齿和 12 齿齿轮。 这些轴将第一、第二和第三传动比相互连接。 当轴转动时,轴上的12齿和36齿齿轮都转动。
这使得每个齿轮比产生的机械优势成倍增加,因为它们连接成复合齿轮比。
疯子 Box 有两个复合齿轮比,因为您可以在任一侧为其输入 - 一个导致扭矩优势,另一个导致速度优势。
计算 MAD 一侧的复合齿轮比 Box,我们需要找到从输入到输出的构建中的三个齿轮比,然后将它们相互相乘。
-
打造专家,找到MAD的一面 输入手柄可转动 36 个齿轮并将其展示给小组的方框。 提示:它是上图底部的手柄。 在构建中指出以查看三个齿轮比的位置。
-
请记住,所有主动齿轮都是 36 齿齿轮,所有从动齿轮都是 12 齿齿轮。
-
计算器和记录器,完成并检查以下方程:

-
整个团队应该尝试回答以下问题: 1:27 复合齿轮比是什么意思? 当带有36齿齿轮的手柄转动一圈时,另一个手柄应转动多少圈?
-
记录员应该组织团队的最佳答案并将其写在工程笔记本中。
![]() 教师工具箱
-
解决方案
教师工具箱
-
解决方案
小组中的计算器和记录员应认识到计算应按如下方式完成:
-
一档传动比中缺失的分数是 1/3。
-
第二传动比中缺少的分数是 12/36 和 1/3。
-
第三传动比中缺失的分数是 12/36。
提供了复合齿轮比计算公式,因为这是学生第一次看到它完成。
1:27的比率意味着前36齿齿轮每完成一整圈,最后12齿齿轮(最靠近输出手柄的齿轮)旋转27圈。 这表明速度具有机械优势。
要求学生以合理的速度转动 36 齿齿轮的手柄,并注意输出手柄转动的速度,从而突出强调速度的机械优势。 从数学上讲,输出手柄的转动速度是输入手柄的 27 倍!
第四步:疯狂 Box 的扭矩复合齿轮比
-
打造专家,找到MAD的一面 输入手柄可转动 12 齿齿轮并将其展示给小组的方框。 提示:它是 MAD 的对面 您在上面使用的盒子。 需要指出的是,使用该输入手柄时,所有主动齿轮均为12齿,所有从动齿轮均为36齿。
-
计算器和记录器,完成并检查以下方程:

-
整个团队应尝试回答以下问题:复合齿轮比是什么?它意味着什么? 您需要转动带有 12 齿齿轮的手柄多少次才能转动另一个手柄一次?
-
记录员应该组织团队的最佳答案并将其写在工程笔记本中。
![]() 教师工具箱
-
解决方案
教师工具箱
-
解决方案
小组中的计算器和记录员应认识到计算应按如下方式完成:
-
一档传动比中缺失的分数是 3/1。
-
第二传动比中缺少的分数是 36/12 和 3/1。
-
第三传动比中缺失的分数是 36/12。
复合齿轮比计算公式缺少 3/1 和 3/1,结果为 27/1,复合齿轮比为 27:1。
27:1 的比率意味着前 12 个齿轮需要完成 27 个完整旋转,才能使最后一个 36 个齿轮(最靠近输出手柄的齿轮)旋转一整圈。 这表明扭矩具有机械优势。
通过要求学生以合理的速度转动带有 12 齿齿轮的手柄,并感受输出手柄转动时的力,向学生强调扭矩的机械优势。 从数学上讲,输出手柄转动的力相当于输入手柄转动 27 圈的力!
第五步:思考 MAD 盒子的设计
为什么MAD不 Box 的六个齿轮排成一排?
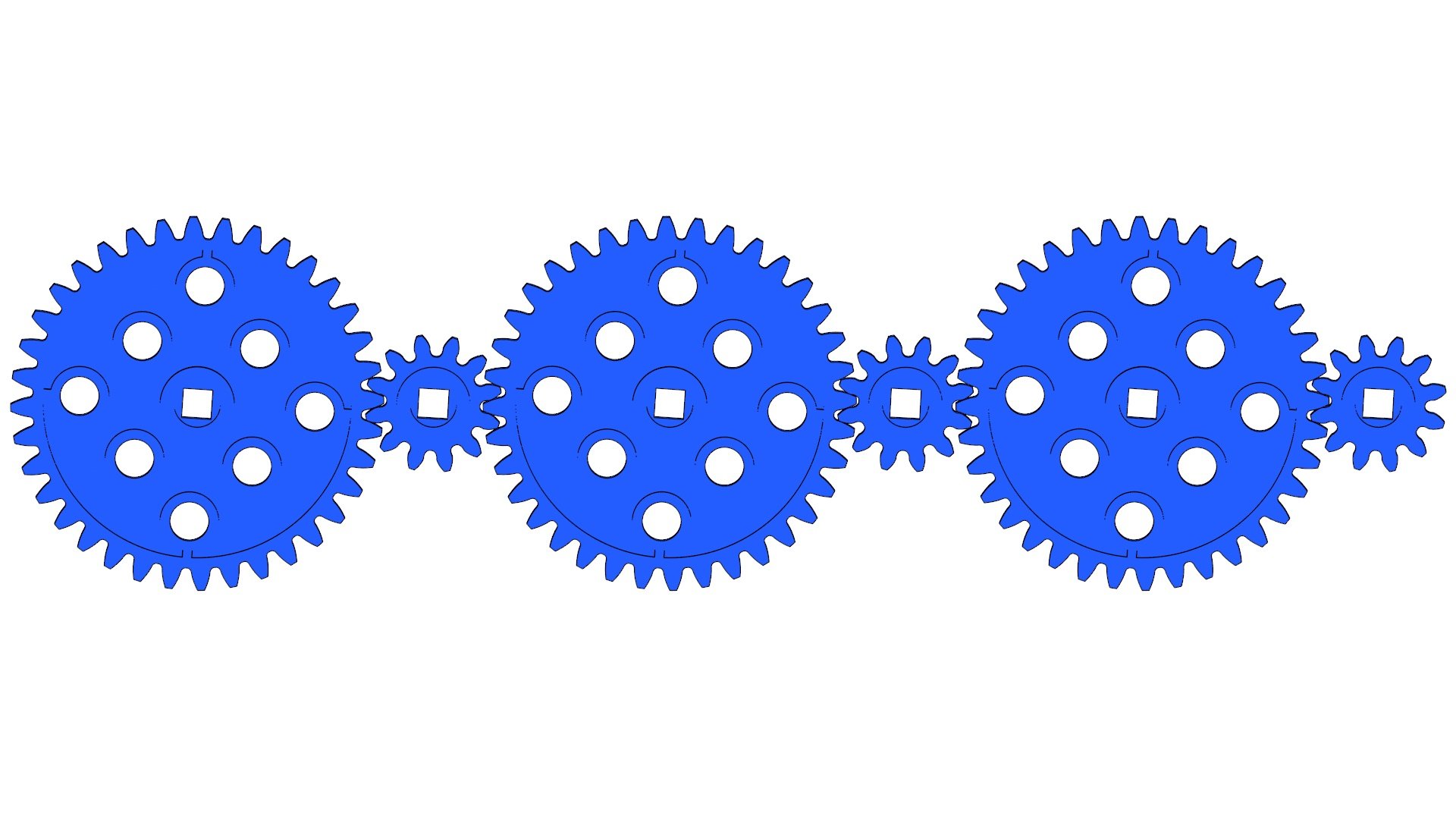
所有齿轮都啮合在一条线上的设计称为 齿轮系。 上图显示了 MAD Box 的齿轮作为齿轮系。
像这样的齿轮系只有一个齿轮比,并且它是 而不是 复合齿轮比。 该比率为 1:3 或 3:1,具体取决于第一个齿轮还是最后一个齿轮是驱动齿轮。 只有该齿轮系中第一个和最后一个齿轮的尺寸与齿轮比有关。
第一个齿轮和最后一个齿轮之间的齿轮称为 惰轮。 它们不会增加功率或速度。 惰轮仅改变旋转方向。
为什么不是MAD 盒子只设计了两个齿轮:一个小齿轮和一个齿数多 27 倍的齿轮?
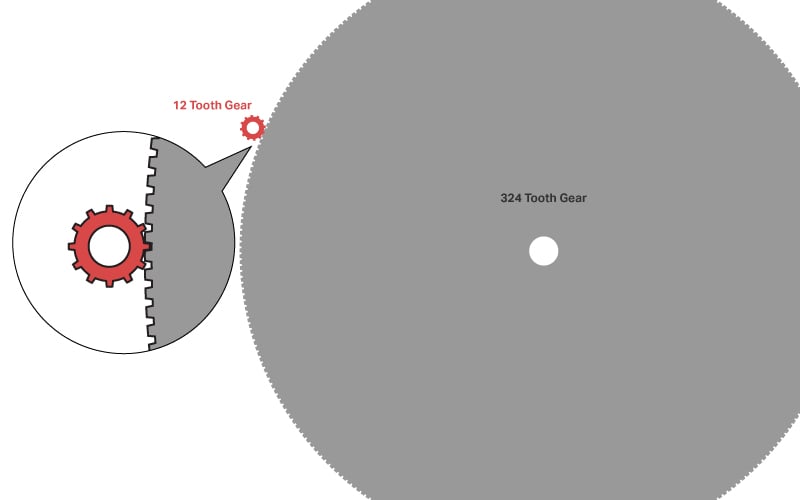
MAD 的复合齿轮比 方框为 1:27 或 27:1。 您可能想知道为什么它不设计为只有两个齿轮:12 齿齿轮和 324 齿齿轮。 这将导致齿轮比为 1:27 或 27:1。

MAD 有两个原因 Box 未设计有 324 齿齿轮。
第一个原因是 VEX 塑料 324 齿轮不存在。 套件中最大的齿轮是 60 齿齿轮。 当工程师设计建造时,他们需要考虑哪些材料可用,而 324 齿齿轮不可用。
第二个原因是 324 齿齿轮(如果可用)将非常大。 如此尺寸的齿轮会使构建变得难以处理。 复合齿轮比对于设计手持设备更有意义。 当工程师设计构建时,他们需要考虑消费者将如何使用该设备。
![]() 激发讨论
-
总结
激发讨论
-
总结
完成本 STEM 实验室后,学生应了解齿轮比对于机器人设计的重要性。 简而言之,给定的齿轮比用于传递动力或为机器人部件创造扭矩或速度机械优势。 从这个讨论开始:
问: 要获得速度这个机械优势,主动齿轮和从动齿轮哪个更大?
答: 在产生速度时,主动齿轮比从动齿轮大。
问: 为什么你可能想要提高机器人的速度?
答: 这样机器人就能尽可能快地移动和操作。
问: 为什么可能想要增加机器人的扭矩? 提示:考虑它
或需要移动重物。 传动系统(轴距)扭矩的增加将有助于其移动。 其爪子或手臂扭矩的增加可以帮助举起重物。
问: 为什么使用复合齿轮比,而不是使用齿数差别较大的两个齿轮?
答: 有些齿轮比太大,以至于建筑物无法容纳这种尺寸的齿轮。 甚至可能没有达到产生该齿轮比所需尺寸的齿轮。 因此,复合齿轮比可帮助工程师创造更大的机械优势,同时最大限度地减少所需的空间。
问: 为什么要在构建中包含齿轮系? 它会增加扭矩或速度吗?
A: 齿轮系有助于传输动力,但不会增加扭矩或速度,不超过齿轮系上末端驱动齿轮和从动齿轮之间的比率。
学生将在“应用”部分的“设计扭矩或速度竞赛机器人”页面中重新思考这一点。 如需进一步阅读,请参阅一篇有关 如何使用简单齿轮比的 VEX 库文章。 本文是在 VEX V5 机器人的背景下编写的,但这些概念也适用于 VEX IQ 机器人设计。