
소개
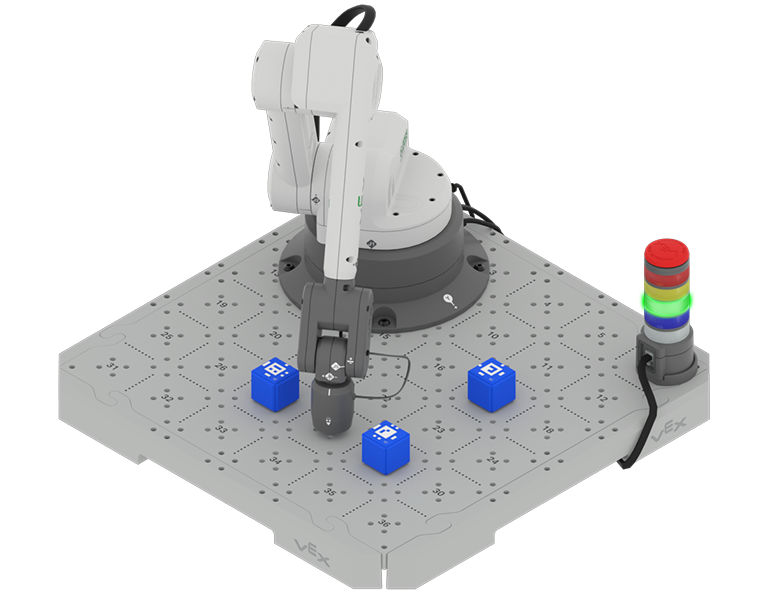
이 단원에서는 6축 암을 사용하여 블록 기반 코딩을 살펴보겠습니다. x, y, z축을 따라 움직이는 6축 팔을 코딩하는 방법을 배웁니다. 그런 다음 이러한 기술을 결합하여 6축 암을 3개 축 모두에서 움직여 큐브와 충돌하지 않고 특정 타일 위치에 닿도록 하는 프로젝트를 만듭니다.
이 단원에서 무엇을 배우고 할 것인지에 대한 개요를 알아보려면 아래의 소개 영상을 시청하세요.
공동 학습 목표 만들기
이제 비디오를 보았으므로 특정 타일 위치를 터치하기 위해 x, y 및 z 축을 따라 이동하도록 6축 암을 코딩하는 것을 알 수 있습니다. 먼저 코드를 수정하여 신호탑의 색상을 변경합니다. 그런 다음 x, y 및 z축을 따라 이동하도록 6축 암을 코딩합니다. 그런 다음 이 모든 것을 모아 Arm을 코딩하여 타일의 위치를 이동하고 터치합니다. 이러한 과제를 완수하기 위해 알아야 할 것과 배워야 할 것이 무엇인지 생각해 본다.
이러한 목표를 포착하기 위해 그룹 및 교사와 함께 학습 목표를 공동으로 생성하여 단원의 학습 목표에 대한 이해를 공유합니다. 교육 과정 전반에 걸쳐 학습 목표를 참조할 수 있도록 엔지니어링 노트에 학습 목표를 작성합니다.
학습 목표를 "나는 할 수 있다" 진술의 형태로 구문화하는 것이 도움이 됩니다. 이 단원의 학습 목표 예시에는 다음이 포함될 수 있습니다.
- 프로그래밍 언어와 로봇 동작을 정의할 수 있습니다.
- 6축 암을 코딩하여 x축의 여러 위치로 이동할 수 있습니다.
- 6축 암을 장애물 위로 이동하는 데 필요한 동작 순서를 기록할 수 있습니다.
학습 목표를 세우려면 먼저 위의 동영상에 표시된 활동을 완료하기 위해 알아야 할 사항을 브레인스토밍하세요. 엔지니어링 노트에 다음과 같이 알아야 할 것, 배워야 할 것, 해야 할 것 등의 목록을 작성합니다.
- 블록의 좌표를 변경하여 6축 암을 x축을 따라 이동합니다.
- 6축 암을 코딩하여 z축을 따라 이동하여 장애물을 통과하십시오.
- 내 엔지니어링 노트에 프로젝트의 동작을 기록합니다.
- 작업을 완료하는 데 필요한 행동을 식별합니다.
- 그룹과 협력하여 활동을 공동으로 완료하기 위해 행동 순서를 정합니다.
그런 다음 목록에 따라 학습 대상을 공동으로 만듭니다. '나는 할 수 있다' 라는 문구를 사용하여 나열한 각 항목을 학습 목표에 어떻게 적용할 수 있는지 생각해 보세요. 이 템플릿을 사용하여 엔지니어링 노트에 학습 목표를 작성할 수 있습니다. (Google Doc / .docx / .pdf)
예를 들어, "블록의 좌표를 변경하여 6축 암을 x축을 따라 이동" 목록 항목은 6축 암을 코딩하여 x축의 여러 위치로 이동할 수 있는 학습 대상으로 이동할 수 있습니다.
다음 표는 엔지니어링 노트의 Learning Target Organizer를 작성하는 방법에 대한 예를 보여줍니다.
| 학습 목표 카테고리 | 학습 목표 |
|---|---|
|
지식 목표 유닛에서 성공하려면 무엇을 알고 이해해야 합니까? |
|
|
스킬 목표 유닛에서 성공하는 데 필요한 개념과 기술을 이해한다는 것을 보여주기 위해 무엇을 보여줄 수 있습니까? |
|
|
제품 타겟 유닛에서 성공하기 위한 개념과 기술에 대한 지식을 입증하고 확장하기 위해 엔지니어링 노트에 무엇을 기록할 수 있습니까? |
|
학습 목표를 교사와 공유하세요. 여러분과 여러분의 그룹, 그리고 여러분의 교사가 모두 동의할 수 있도록 필요에 따라 조정한다.
어휘
이 단원에서는 6축 암의 움직임을 제어하는 방법으로 블록 기반 코딩을 소개합니다. 이 어휘 목록은 여러분이 접할 수 있는 새로운 용어에 대한 참조를 제공하기 위해 여기에 있습니다. 이 어휘를 엔지니어링 노트에 기록하십시오. 이 목록을 참조로 사용하여 단원을 살펴보고 익숙하지 않은 단어를 만나십시오.
- 행동
- 로봇에 의해 수행되고 프로그래밍 언어에 의해 정의된 작업.
- 프로그래밍 언어
- 기호가 행동을 나타내는 일련의 규칙. VEXcode는 6축 ARM의 프로그래밍 언어입니다.
- 명령
- 로봇 팔의 동작을 변경하는 프로그래밍 블록.
- 제어 정지
- 사고나 손상을 방지하기 위해 제어된 방식으로 6축 암의 움직임을 즉시 중지할 수 있는 안전 기능입니다.
| 수량 | 필요한 재료 |
|---|---|
| 그룹당 1개 |
CTE 워크셀 키트 |
| 그룹당 1개 |
컴퓨터 |
| 그룹당 1개 |
VEXcode EXP |
| 학생당 1명 |
엔지니어링 노트 |
| 그룹당 3개 |
큐브 |
프로젝트 로드, 이름 지정 및 저장
VEXcode를 사용하여 6축 암을 코딩하기 전에 프로젝트를 열고, 이름을 지정하고, 저장하는 방법을 배워야 합니다. 프로젝트를 로드, 이름 지정 및 저장할 때 아래 단계를 참조로 사용합니다.
- 기존 프로젝트를 로드하려면 파일 메뉴에서 열기 를 선택합니다.

2. 다음으로, 장치의 파일을 탐색하여 확장자가 .cteblocks 인 프로젝트를 찾아 엽니다.

3. 프로젝트를 저장하려면 먼저 프로젝트 이름 필드를 선택하십시오. 프로젝트 이름을 지정할 수 있는 대화 상자가 열립니다. 나중에 쉽게 참조할 수 있도록 프로젝트 이름을 지정하고 저장 을 선택합니다.

다음 을 > 선택하여 프로젝트 다운로드 및 실행에 대해 알아보세요.