
관계를 맺다
Engage 섹션 시작
ACTS는 교사가 할 일이고, ASKS는 교사가 어떻게 진행할 것인가입니다.
| 행위 | 묻습니다 |
|---|---|
참고: 페이지 하단의 균열 크기에 대한 정보는 다음 실습에서 사용되므로 지금 학생들과 논의할 필요는 없습니다.
|
|
학생들이 건축을 준비하도록 하기
다리가 안전하지 않다는 주장이 사실인지 확인하기 위한 데이터를 수집하기 전에 코드 베이스를 빌드하고 눈 센서를 추가해야 하며, 눈 센서가 위를 향하고 있는지 확인해야 합니다.
교사 팁:학생들이 프로젝트를 만드는 동안, Play Part 1에서 프로젝트를 실행하는 데 사용될 학생 기기에인쇄 데이터프로젝트 로드합니다.
빌드를 용이하게 하다
-
지시
학생에게 코드 베이스를 사용하여 다리 바닥에 대한 데이터를 수집하여 다리에 위험한 균열이 있다는 주장을 테스트할 것이라고 지시합니다. 이를 위해서는 코드 베이스 - 눈을 아래로 향하게 한 다음, 눈 센서를 위쪽을 향하게 해야 합니다.
학생들에게 그룹에 가입하도록 지시하고 로봇 역할 & 루틴 시트를 완성하게 합니다. 학생들이 이 시트를 완성할 수 있도록 랩 이미지 슬라이드쇼의 제안된 역할 책임 슬라이드를 가이드로 활용하세요.
-
배포각 그룹에 빌드 지침을
합니다. 학생들은 먼저 빌드 지침에 따라 Code Base 2.0을 빌드합니다. 그런 다음 코드 베이스 2.0 - 눈 아래로 지침에 따라 로봇에 눈 센서를 추가합니다.
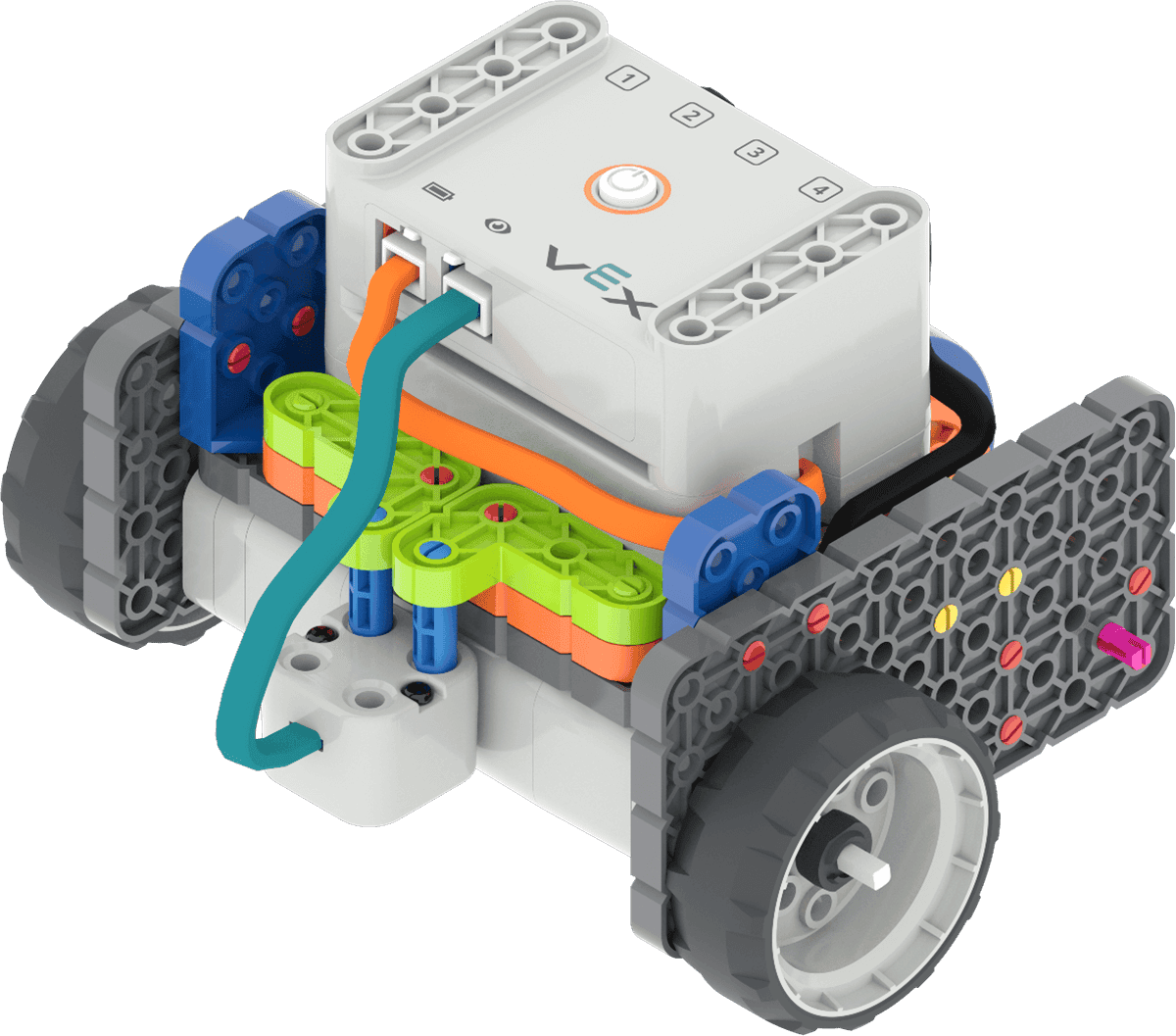
코드 베이스 2.0 - Eye Down 빌드 -
건물 건설 과정을 촉진합니다.
건설 과정을 촉진합니다.
- 건설업자와 언론인은 랩 2 이미지 슬라이드쇼에 표시된 것과 같이 자신의 역할과 책임에 따라 건설을 시작해야 합니다. 로봇 역할 및 루틴 시트 학생들이 로봇을 제작하기 위한 역할을 구성하는 데 도움이 될 수 있습니다.
- 교실을 돌아다니며 학생들이 건물을 짓거나 필요한 경우 건물 지침을 활용할 수 있도록 돕습니다. 모든 학생이 건축 과정에 참여할 수 있도록 건물이 어떻게 건설되는지에 대한 질문을 하고, 도움이 필요한 경우 학생들에게 역할 책임을 따르도록 상기시킵니다.
-
학생들이 조립을 완료하면 눈 센서를 위쪽으로 향하게 옮겨야 합니다. 이렇게 하면 센서가 다리 바닥을 효과적으로 스캔할 수 있습니다. 학생들은 여기에 표시된 대로 눈 센서를 고정하는 주황색 스탠드오프를 분리하여 녹색 각도 빔의 맨 위로 옮겨야 합니다. 그룹이 코드 베이스 - Eye Forward 빌드를 완료하는 동안 체크인한 다음, Eye Sensor를 올바른 방향으로 옮기는 방법을 보여주세요.
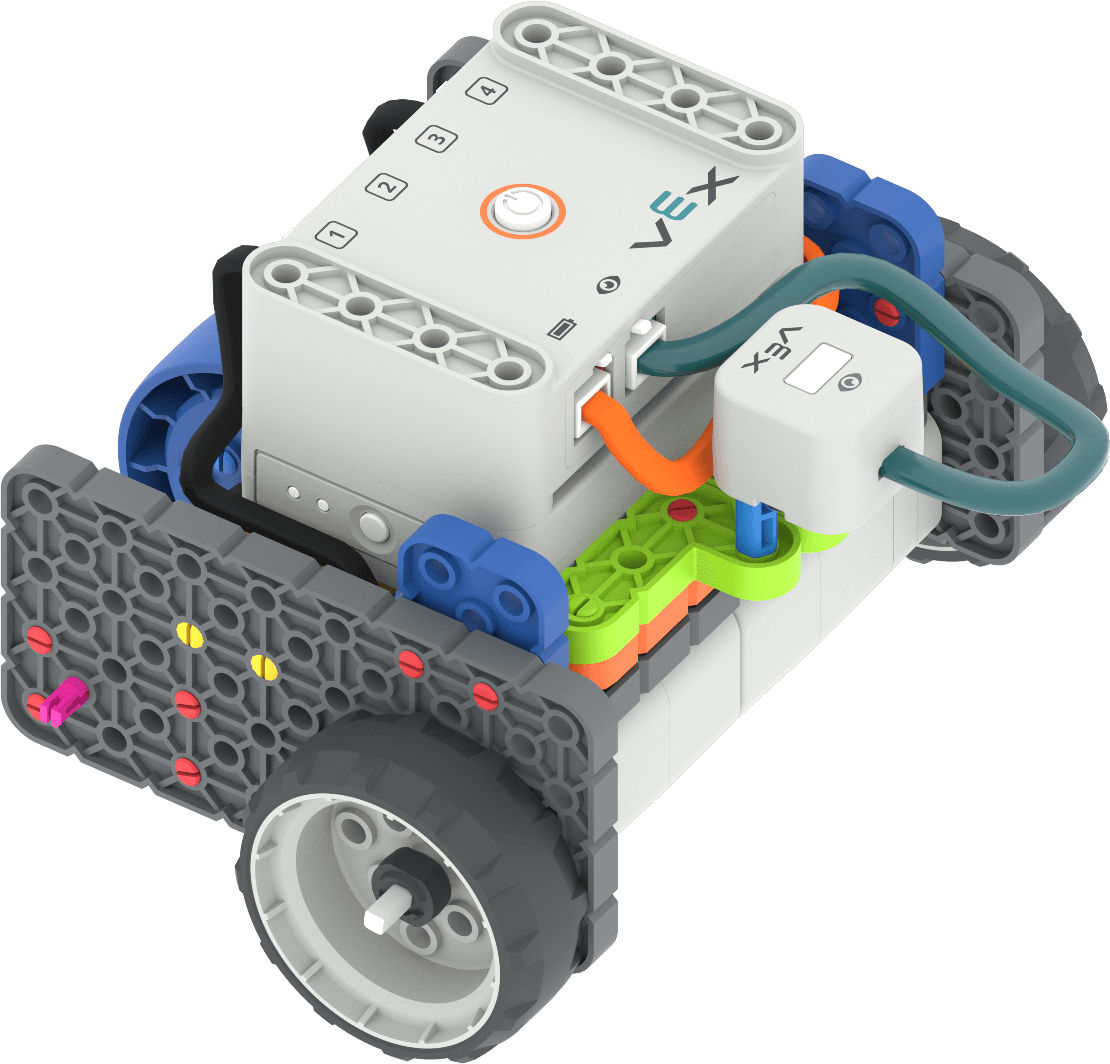
눈 센서를 이동
- 제안제안 제안하고 그룹이 함께 구성하면서 긍정적인 교대근무, 의사소통, 문제 해결 전략을 기록하세요.

교사 문제 해결
- 다리를 설치할 때, 각 지지대마다 GO Kit Box를 3개씩 사용하거나 책을 같은 높이로 쌓아 사용하세요. 두 지지대의 높이가 같아야 다리 표면이 지면과 평행을 이루기 때문에 중요합니다. 위쪽을 향한 눈 센서가 있는 코드 베이스가 다리 아래에 맞고 쉽게 통과할 수 있는지 확인하세요.
- 단원 개요에 있는 배경 정보를 꼭 읽어보세요. 센서가 예상치 못한 데이터를 반환할 경우 학생들이 문제를 쉽게 해결할 수 있도록 도울 수 있습니다.
촉진 전략
- 이 연구실은 데이터를 연구하고 그래프로 표현하는 데 중점을 둡니다. 재생 섹션의 목표는 학생들이 브리지 검사 보고서에서 인쇄 콘솔에 인쇄된 데이터를 보고 사용할 수 있도록 하는 것입니다. 학생들 랩 활동을 완료하기 모든 코딩 개념알거나필요없습니다 프로젝트 자체를 구축하는 것보다는 프로젝트에서 생성된 데이터에 주의를 기울여야 합니다.
- 이 랩에서는 랩의 플레이 섹션을 시작하기 전에 학생 기기에 다운로드해야 하는 VEXcode GO 프로젝트를 사용합니다. 학생들이 인쇄 데이터프로젝트에 어떻게 접근할지 결정하세요.
- 수업 전이나 학생들이 로봇을 만드는 동안 학생 기기에 다운로드할 수 있습니다.
- 학생들이 LMS나 다른 수단을 통해 파일에 접근하는 데 익숙하다면, 재생 섹션을 시작하기 전에 해당 방법을 사용하도록 지도하세요.
- 다운로드한 프로젝트를 로드하고 여는 방법에 대한 자세한 내용은 다음 장치별 VEX 라이브러리 문서를 참조하세요.
- VEXcode GO 설정에 대한 자세한 내용은 이 문서를 참조하세요.
- 인쇄 데이터프로젝트를 학생 기기에 다운로드할 수 없는 경우, 데모로 Play Part 1을 구현해 보세요. 프로젝트를 대 기기에 다운로드하고, 학생들이 설정 주변에 모여 로봇이 프로젝트를 실행하는 모습을 지켜보면서 Play Part 1의 단계를 따르세요. 전체 학급은 인쇄 콘솔에 인쇄된 동일한 데이터 세트를 사용할 수 있습니다.
- 전체 학급이 인쇄 콘솔에서 데이터를 쉽게 볼 수 있도록 VEXcode GO를 투사할 수도 있습니다. 이렇게 하면 각 그룹이 각자의 속도에 맞춰 데이터를 그래프로 표현할 수 있습니다.
- 수업 전에 각 그룹에 필요한 자료를 모으세요. 이 실험에서는 두 명의 학생으로 구성된 각 그룹에 GO 키트, 조립 설명서, VEXcode GO에 접속할 수 있는 컴퓨터나 태블릿, 미리 조립된 교량 설치 및 교량 검사 보고서가 필요합니다. 학생들은 교량 검사 보고서를 작성하기 위해 연필도 필요합니다.
- 수업 전에 다리를 미리 만들어 두세요. 이 실험에서는 2명의 학생으로 구성된 각 그룹에 색깔 있는 빔이 부착된 GO 타일이 필요합니다.
-
노란색, 녹색, 파란색 빔을 추가하여 다리 패턴을 구성하면 다음과 같습니다.

브릿지 설정 -
학생들은 실험 활동에 참여하기 전에 들보의 패턴을 보지 않아야 하므로 타일은이 오기 전에 다리 지지대에 설치하고 사용할 준비가 되어 있어야 합니다. 이것은 다리를 설치하는 방법의 한 예입니다. 브리지 타일을 시작 부분에 배치할 때 코드 베이스나 아이 센서에 닿지 않도록 주의하세요. (이 이미지에서는 로봇이 다리의 '시작' 부분에 표시되어 있습니다.)
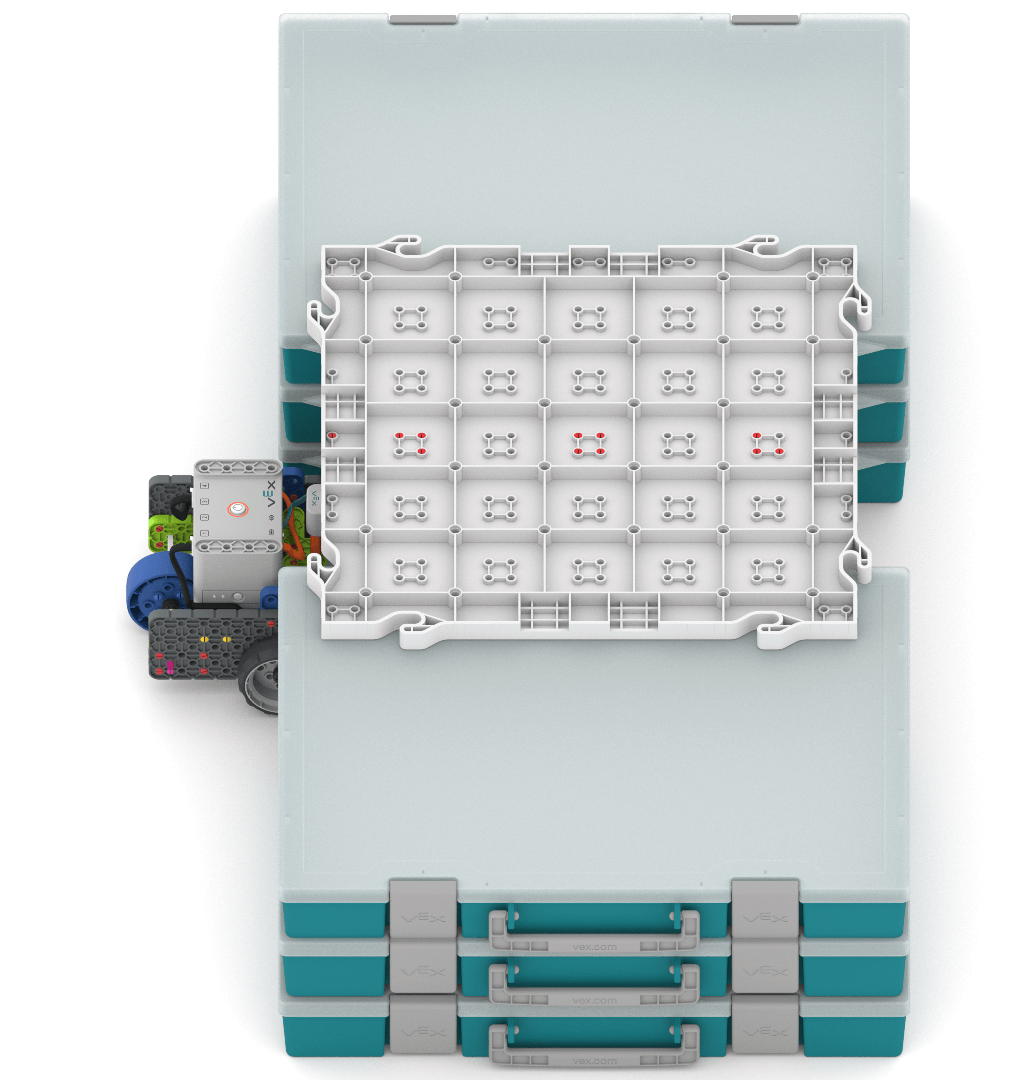
랩 2 브릿지 설정
-