
Uczyć się
Zanim będziesz mógł prowadzić TrainingBota w wyzwaniu Ósemka, musisz najpierw nauczyć się prowadzić TrainingBota za pomocą kontrolera.
Program kontroli kierowców
W Brain jest już wbudowany program, który pozwala sterować TrainingBotem za pomocą Kontrolera, bez konieczności pisania jakiegokolwiek kodu. Obejrzyj animację poniżej i postępuj zgodnie z instrukcjami, aby uruchomić program Driver Control w Brain.
Konfiguracje kontrolera
Istnieją cztery różne konfiguracje programu Driver Control w Brain: lewy, prawy, dzielony i podwójny. Wykonaj poniższe kroki, aby dowiedzieć się, czym jest każda z czterech konfiguracji i jak je wybrać w Brain.
Obejrzyj animację, aby zobaczyć, jak wybrać konfigurację kontrolera dla programu Driver Control w Brain. Kroki obejmują:
- Naciśnij ikonę „Drive”, aby wybrać program Drive.
- Wybierz ikonę „Sterowanie”, aby wyświetlić opcje konfiguracji.
- Wybierz „Lewy”, „Podwójny”, „Podział” lub „Prawy”, aby wyświetlić każdą konfigurację kontrolera.
Każda z czterech opcji sterowania przez kierowcę umożliwia sterowanie BaseBotem za pomocą joysticków na różne sposoby.
| Konfiguracja | Opis |
Sterowanie joystickiem |
|---|---|---|
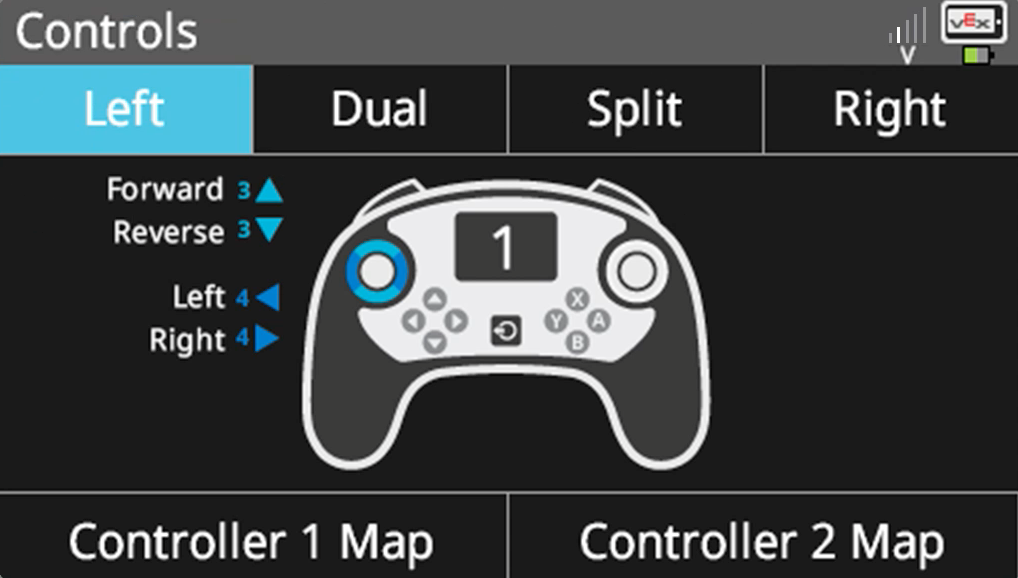 |
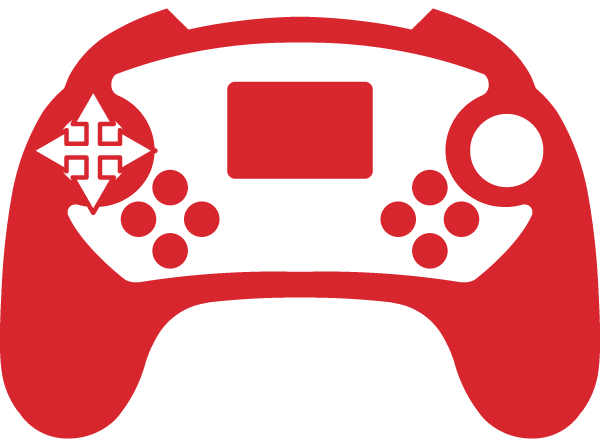
Lewy Prowadź robota do przodu, do tyłu, w lewo i w prawo, używając lewego joysticka. |
 |
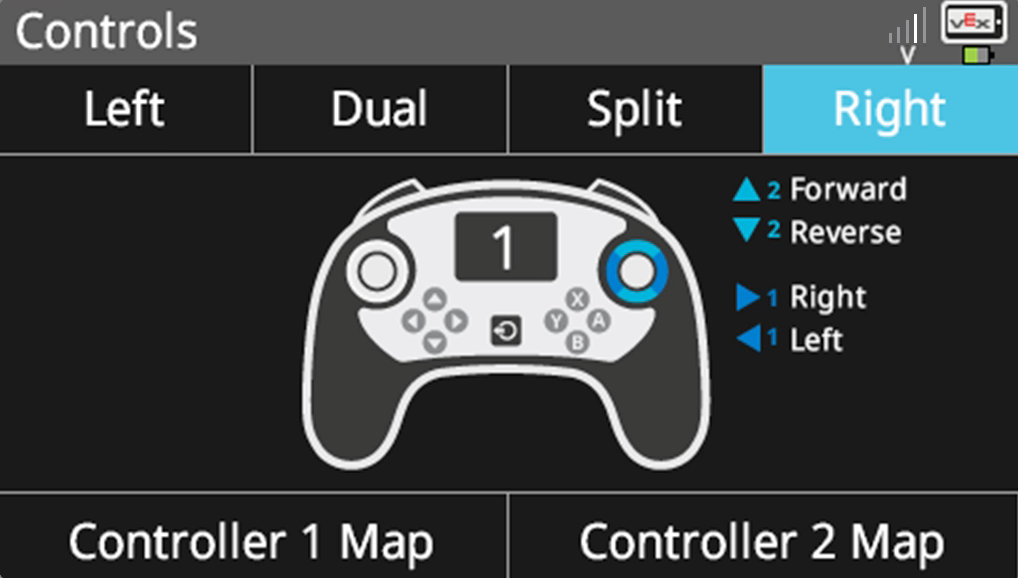 |
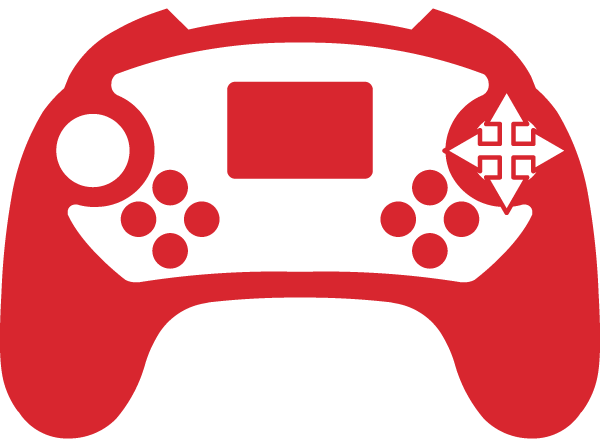
Prawidłowy Prowadź robota do przodu, do tyłu, w lewo i w prawo, używając prawego joysticka. |
 |
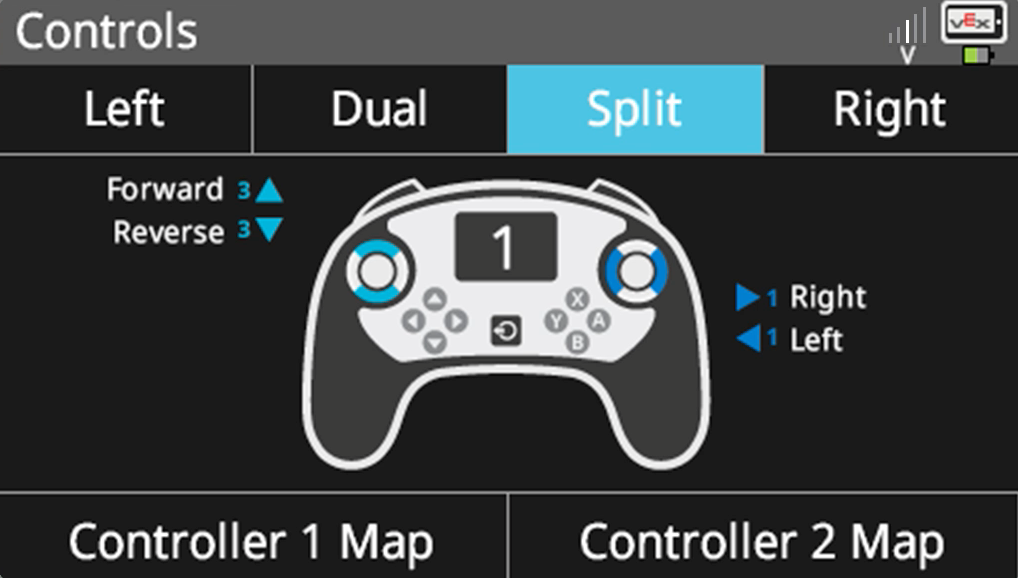 |
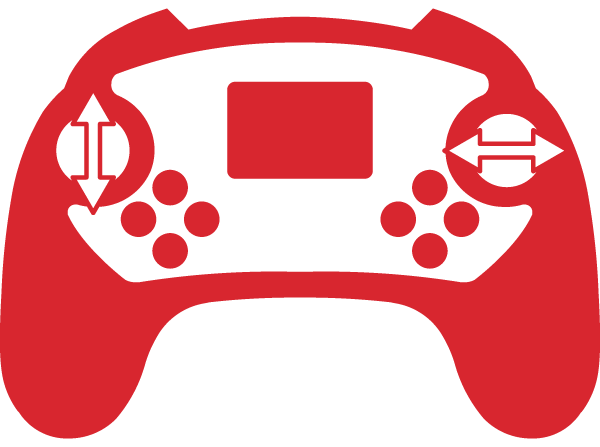
Podział Prowadź robota w lewo i w prawo za pomocą lewego joysticka, a do przodu i do tyłu za pomocą prawego joysticka. |
 |
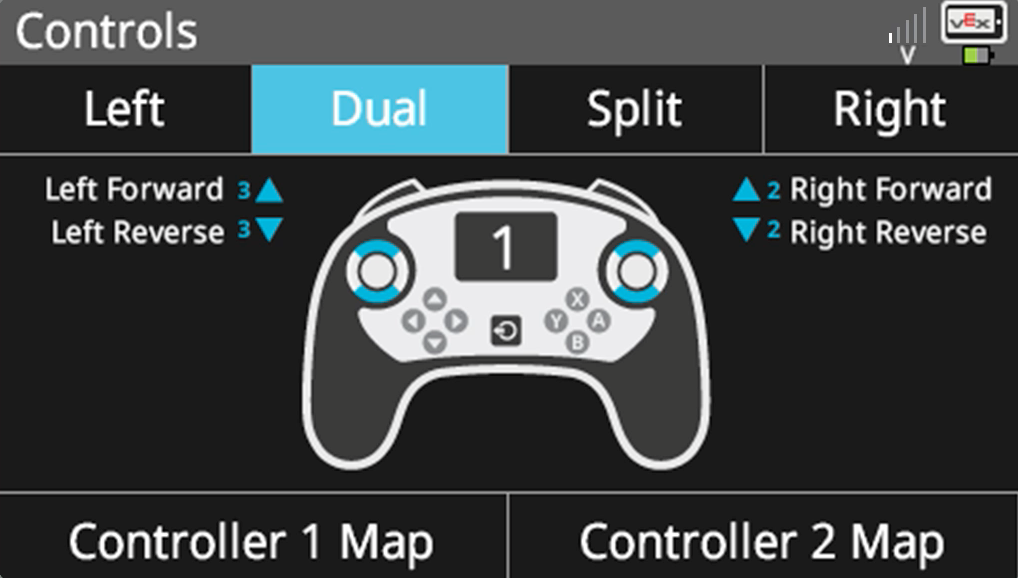 |
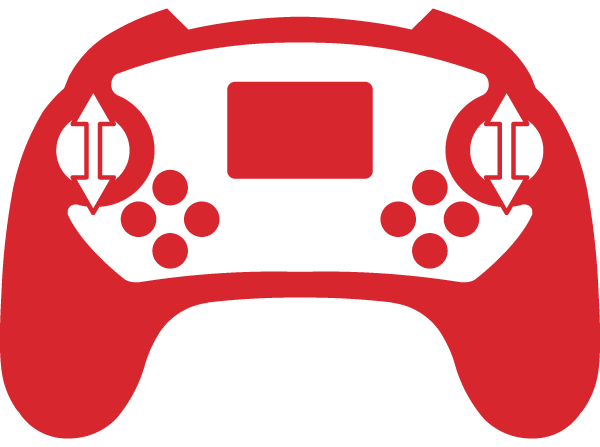
Podwójny Napędzaj lewy silnik robota za pomocą lewego joysticka, a prawy silnik robota za pomocą prawego joysticka. |
 |
Sprawdź czy dobrze zrozumiałeś
Zanim przejdziesz do sekcji Praktyka, upewnij się, że rozumiesz pojęcia omówione na tej stronie, odpowiadając na pytania w poniższym dokumencie w swoim notatniku inżynierskim.
Sprawdź, czy rozumiesz pytania Google / .docx / .pdf
Wybierz Dalej > , aby przećwiczyć korzystanie z programu sterującego sterownikiem w swoim robocie.