
Học hỏi
Trước khi bạn có thể điều khiển TrainingBot trong Thử thách Figure Eight, trước tiên bạn cần học cách điều khiển TrainingBot bằng Bộ điều khiển.
Chương trình điều khiển trình điều khiển
Có một chương trình được tích hợp sẵn trong Brain cho phép bạn điều khiển TrainingBot bằng Bộ điều khiển mà không cần phải viết bất kỳ mã nào. Xem hình ảnh động bên dưới và làm theo để chạy chương trình Driver Control trên Não.
Cấu hình bộ điều khiển
Có bốn cấu hình khác nhau của chương trình Driver Control trên Brain: Lái xe trái, lái xe phải, lái xe chia đôi và lái xe kép. Thực hiện theo các bước trong hình ảnh động bên dưới để tìm hiểu về từng cấu hình trong bốn cấu hình và cách chọn chúng trên Brain.
Xem hình ảnh động để biết cách chọn cấu hình Bộ điều khiển cho chương trình Điều khiển trình điều khiển trên Não. Các bước bao gồm:
- Nhấn vào biểu tượng 'Drive' để chọn chương trình Drive.
- Chọn biểu tượng 'Điều khiển' để xem các tùy chọn cấu hình.
- Chọn 'Trái', 'Kép', 'Tách' hoặc 'Phải' để xem từng cấu hình Bộ điều khiển.
Mỗi tùy chọn điều khiển của trình điều khiển cho phép bạn điều khiển BaseBot bằng cần điều khiển theo những cách khác nhau.
| Cấu hình | Sự miêu tả | Điều khiển cần điều khiển |
|---|---|---|
 |
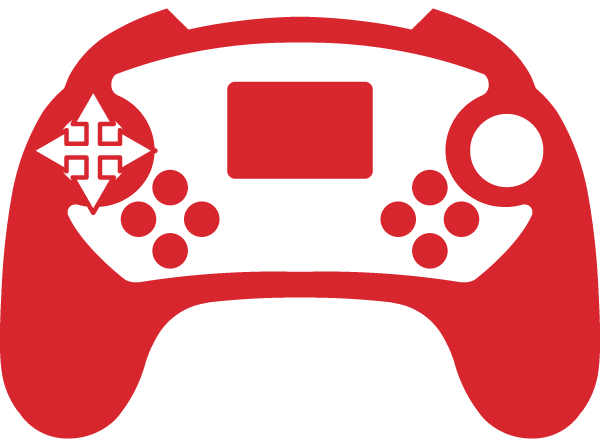
Bên trái Điều khiển robot tiến, lùi, trái, phải bằng cần điều khiển bên trái. |
 |
 |
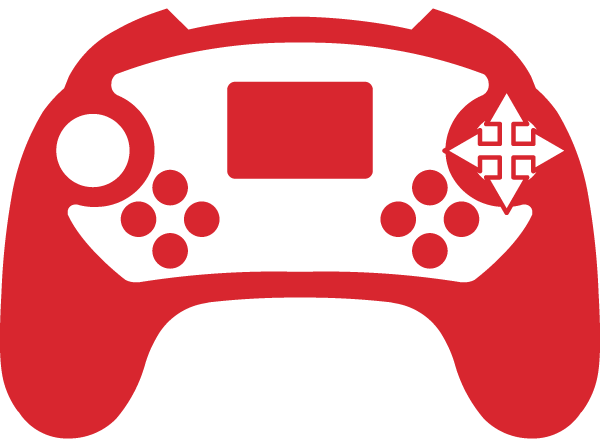
Phải Điều khiển robot tiến, lùi, trái, phải bằng cần điều khiển bên phải. |
 |
 |
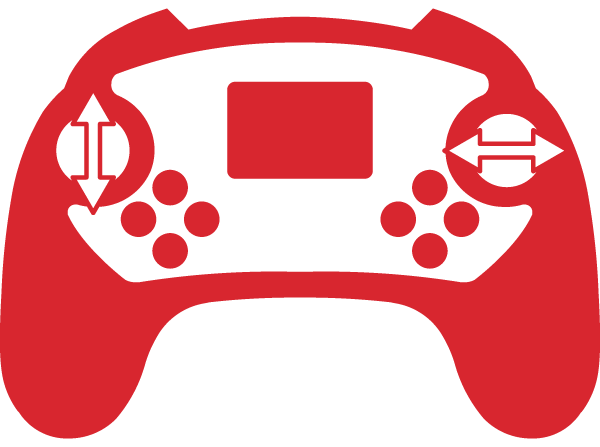
Tách ra Điều khiển robot sang trái và phải bằng cần điều khiển bên trái, tiến và lùi bằng cần điều khiển bên phải. |
 |
 |
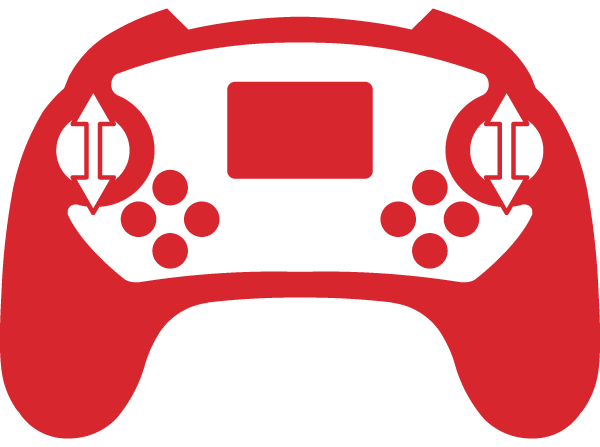
Hai Điều khiển động cơ bên trái của robot bằng cần điều khiển bên trái và điều khiển động cơ bên phải của robot bằng cần điều khiển bên phải. |
 |
Kiểm tra sự hiểu biết của bạn
Trước khi chuyển sang phần Thực hành, hãy đảm bảo rằng bạn hiểu các khái niệm được đề cập trên trang này bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn Google / .docx / .pdf
ChọnTiếp theo > để thực hành sử dụng chương trình điều khiển trình điều khiển với robot của bạn.