
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
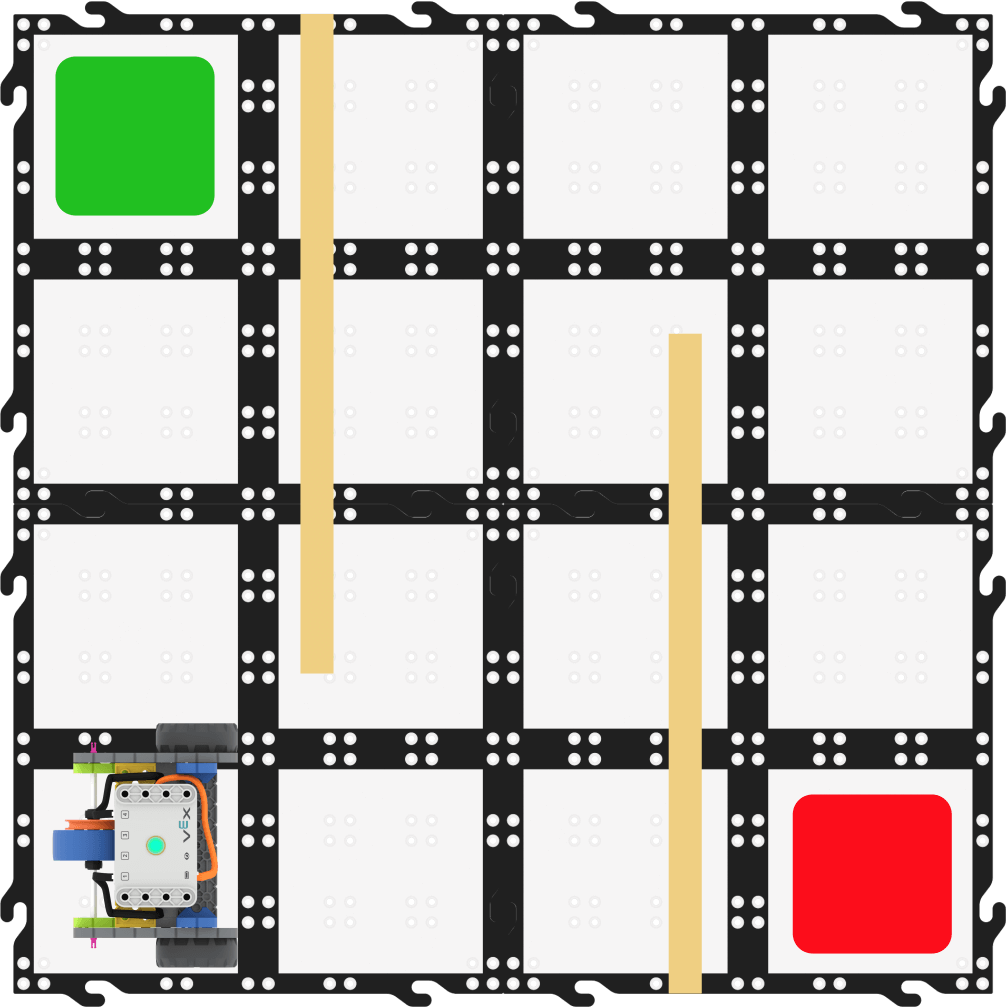
- คำสั่งสั่งให้ผู้เรียนใช้ VEXcode GO เพื่อนำทางหุ่นยนต์ของตนผ่านหลักสูตรท้าทาย 1
พวกเขาจะทำซ้ำในโครงการของตนเพื่อที่จะผ่านหลักสูตร Challenge Course ได้สำเร็จ
ชมวิดีโอด้านล่างเพื่อดูว่าหุ่นยนต์สามารถเคลื่อนที่ไปตามเส้นทางได้อย่างไร
ไฟล์วีดีโอ
- แบบจำลองที่แบบจำลองสำหรับให้นักเรียนสร้างหลักสูตรท้าทายตามรูปแบบใน Lab 1 Image
Slideshow
- เมื่อนักเรียนสร้างหลักสูตรท้าทายแล้ว ให้จำลองวิธีการเปิดใช้ VEXcode GO ให้กับนักเรียน, เชื่อมต่อสมองของพวกเขา, และ ตั้งชื่อและบันทึกโครงการ. สั่งให้ผู้เรียนตั้งชื่อโครงการของตนเอง หลักสูตร 1.
หมายเหตุ: เมื่อคุณเชื่อมต่อ Code Base กับอุปกรณ์เป็นครั้งแรก Gyro ที่ติดตั้งอยู่ใน Brain อาจปรับเทียบ ทำให้ Code Base เคลื่อนที่เองชั่วขณะ นี่คือพฤติกรรมที่คาดไว้ อย่าสัมผัส Code Base ขณะกำลังปรับเทียบ

ตั้งชื่อโครงการ - หลังจากตั้งชื่อโครงการแล้ว นักเรียนจะต้องกำหนดค่าโค้ดฐาน จำลองขั้นตอนใน การกำหนดค่าฐานรหัส VEX GO บทความถ้านักเรียน ต้องการความช่วยเหลือใด ๆ.
- เพิ่มบล็อก [ไดรฟ์สำหรับ] ลงในเวิร์กสเปซและเชื่อมต่อกับบล็อก {When started} ถามนักเรียนว่าต้องขับเคลื่อน Code Base ไปข้างหน้าไกลแค่ไหน นักเรียนจะตอบคำถามที่อาจถูกต้องหรือไม่ถูกต้องก็ได้ แต่ให้พวกเขารู้ว่าวิธีเดียวที่จะรู้ได้แน่ชัดคือการวัด
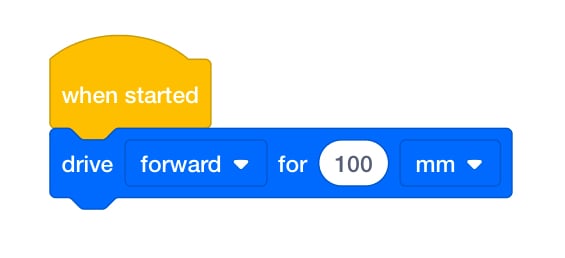
[ไดรฟ์สำหรับ] เชื่อมต่อกับ {When started} - สร้างแบบจำลองโดยใช้ไม้บรรทัดเพื่อวัดระยะทางที่ฐานโค้ดต้องขับเคลื่อนไปข้างหน้า จากนั้นป้อนตัวเลขนั้นลงในบล็อก [ขับเคลื่อนสำหรับ] เตือนนักเรียนว่าบล็อก [ขับเคลื่อนสำหรับ] สามารถตั้งค่าเป็นมิลลิเมตร (มม.) หรือนิ้วได้

การเปลี่ยนแปลงพารามิเตอร์ - สั่งให้นักเรียนวัดต่อไปและใช้บล็อก [Drive for] และ [Turn for] เพื่อสร้างโครงการของพวกเขา ตามที่พวกเขา สร้างโครงการของพวกเขา มีพวกเขา เริ่ม และทดสอบโปรเจ็กต์ของตนเพื่อให้สามารถระบุจุดที่ต้องแก้ไขได้ จะทำ.
- อำนวยความสะดวกอำนวยความสะดวกในการอภิปรายกับนักเรียนโดยถามคำถามต่อไปนี้:
- หุ่นยนต์ของคุณต้องเคลื่อนที่ไปในทิศทางไหนก่อน?
- หุ่นยนต์ของคุณต้องเคลื่อนที่ไปไกลแค่ไหน?
- หุ่นยนต์ของคุณจำเป็นต้องหมุนตัวบ้างไหม? หากเป็นเช่นนั้นจะไปในทิศทางใด?
- คุณสามารถใช้มือของคุณอธิบายได้ไหมว่าหุ่นยนต์ต้องเคลื่อนที่ไปตามเส้นทางอย่างไร
- คุณสามารถอธิบายได้ไหมว่าแต่ละคำสั่งในโปรเจ็กต์ของคุณทำหน้าที่อะไร
- หุ่นยนต์ Code Base ของคุณกำลังเคลื่อนไหวในลักษณะที่คุณไม่คาดคิดหรือไม่?

นักศึกษาช่วยกันใช้แท็บเล็ต (เพื่อเขียนโปรแกรม Code Base) - เตือนใจเตือนใจนักเรียนให้พยายามต่อไปแม้ว่าในตอนแรกพวกเขาจะล้มเหลวก็ตาม นักเรียนจะต้องทำโครงการของตนซ้ำหลายครั้ง
- ถามถามนักเรียนว่าพวกเขาเคยต้องลองบางสิ่งบางอย่างหลายครั้งเพื่อให้ได้มันถูกต้องหรือไม่ ถามนักเรียนว่าพวกเขารู้สึกว่าการลองทำบางสิ่งบางอย่างหลายๆ ครั้งเป็นทักษะที่มีค่าสำหรับงานในอนาคตหรือไม่ พูดคุยถึงความสำคัญของการสามารถทำงานแบบวนซ้ำได้ในอนาคต
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
เมื่อกลุ่ม แต่ละกลุ่มทำการทดสอบเสร็จเรียบร้อยแล้ว ให้มารวมตัวกันเพื่อพูดคุยสั้นๆ
- เกิดอะไรขึ้นระหว่างการทดสอบของคุณ? หุ่นยนต์ของคุณเคลื่อนไหวตามที่คาดหวังหรือไม่?
- คุณแก้ไข/เปลี่ยนแปลงโครงการของคุณอย่างไร?
- คุณทำงานร่วมกันเป็นกลุ่มเพื่อสร้างการเปลี่ยนแปลงอย่างไร?
ตอนที่ 2 - ทีละขั้นตอน
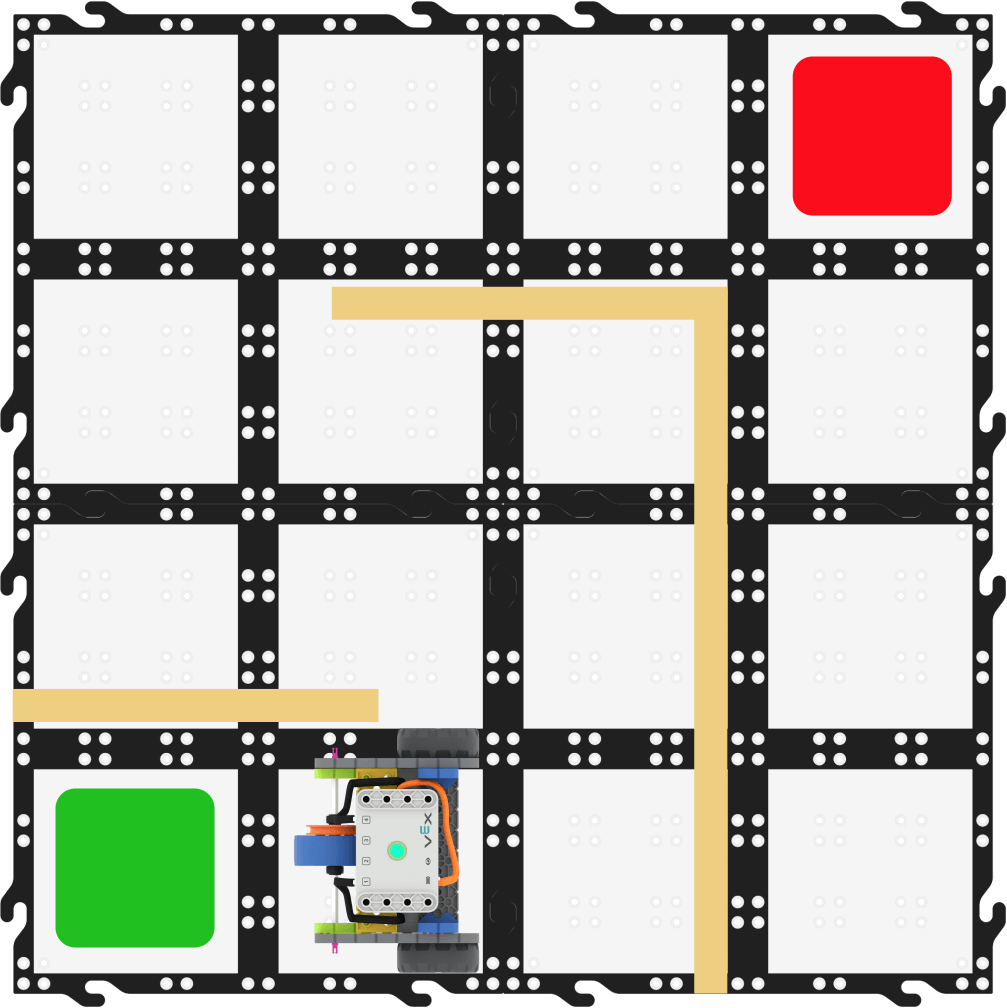
- สั่งให้สั่งให้นักเรียนทราบว่าพวกเขาจะตั้งค่า Challenge Course 2 และสร้างโปรเจ็กต์
VEXcode GO โดยที่ Code Base ของพวกเขาจะย้ายจากจุดเริ่มต้นไปยังจุดสิ้นสุดของหลักสูตร
ชมวิดีโอด้านล่างเพื่อดูว่าหุ่นยนต์เคลื่อนไหวได้อย่างไรในหลักสูตรนี้
ไฟล์วีดีโอ
- แบบจำลองแบบจำลองสำหรับให้นักเรียนสร้างหลักสูตรท้าทายที่ 2 โดยใช้เทป โดยทำตามเค้าโครงใน
Lab 1 ภาพสไลด์โชว์
- เมื่อนักเรียนสร้างหลักสูตรท้าทายที่สองแล้ว ตรวจสอบให้แน่ใจว่านักเรียนยังคงมี VEXcode GO เปิด, สมองเชื่อมต่อกัน, และ กำหนดค่าฐานรหัสแล้ว. มีนักเรียน บันทึกโครงการของพวกเขา และตั้งชื่อโครงการใหม่ คอร์ส 2.

ตั้งชื่อโครงการ - นักเรียนจะทำตามขั้นตอนเดียวกันกับ Play Part 1 เพื่อสร้างโปรเจ็กต์ที่นำ Code Base ผ่านหลักสูตรความท้าทาย หากจำเป็น ให้สร้างแบบจำลองอีกครั้งว่าจะใช้ไม้บรรทัดวัดระยะทางที่ฐานโค้ดต้องขับเคลื่อนไปข้างหน้าอย่างไร แล้วป้อนตัวเลขนั้นลงในบล็อก [ขับเคลื่อนเพื่อ]
- สั่งให้นักเรียนวัดต่อไปและใช้บล็อก [Drive for] และ [Turn for] เพื่อสร้างโครงการของพวกเขา ตามที่พวกเขา สร้างโครงการของพวกเขา มีพวกเขา เริ่ม และทดสอบโปรเจ็กต์ของตนเพื่อให้สามารถระบุจุดที่ต้องแก้ไขได้ จะทำ.
- อำนวยความสะดวกอำนวยความสะดวกในการอภิปรายกับนักเรียนโดยถามคำถามต่อไปนี้:
- เมื่อเสร็จสิ้น Challenge Course 2 แล้ว หุ่นยนต์ Code Base จะหันหน้าไปในทิศทางใด?
- หากหุ่นยนต์ Code Base สามารถเลี้ยวซ้ายได้เท่านั้น มันจะสามารถทำภารกิจนี้สำเร็จได้หรือไม่? หากเป็นเช่นนั้นจะทำอย่างไร?
- คุณสามารถใช้มือของคุณอธิบายได้ไหมว่าหุ่นยนต์ต้องเคลื่อนที่ไปตามเส้นทางอย่างไร
- คุณสามารถอธิบายได้ไหมว่าแต่ละคำสั่งในโปรเจ็กต์ของคุณทำหน้าที่อะไร
- หุ่นยนต์ Code Base ของคุณกำลังเคลื่อนไหวในลักษณะที่คุณไม่คาดคิดหรือไม่?
นักศึกษาช่วยกันใช้แท็บเล็ต (เพื่อเขียนโปรแกรม Code Base) - เตือนใจเตือนใจนักเรียนให้พยายามต่อไปแม้ว่าในตอนแรกจะล้มเหลวก็ตาม นักเรียนจะต้องทำโครงการของตนซ้ำหลายครั้ง
- ถามขอให้เด็กนักเรียนที่เรียนจบหลักสูตร Challenge ทั้งสองหลักสูตรทำแบบทดสอบเลือกคำตอบ