
الدرس 2: تخطيط المشروع
في هذا الدرس، ستتعلم كيفية استخدام كتلة [Energize Electromagnet] لالتقاط الأقراص وإفلاتها في ملعب Disk Mover Playground. ستستخدم كتلة [Energize Electromagnet] مع كتل مجموعة نقل الحركة لالتقاط ونقل ثلاثة أقراص زرقاء إلى الهدف الأزرق في التحدي المصغر.
مخرجات التعلم
- حدد أن كتلة [تنشيط المغناطيس الكهربائي] لها وضعان مختلفان: التعزيز أو السقوط.
- حدد أن كتلة [تنشيط المغناطيس الكهربائي]، عند ضبطها على التعزيز، تجذب قرصًا إلى المغناطيس الكهربائي.
- حدد أن كتلة [تنشيط الكهرومغناطيس]، عند ضبطها على السقوط، تحرر القرص الذي يحمله الكهرومغناطيس.
- حدد أن كتلة [تنشيط المغناطيس الكهربائي] هي كتلة مكدسة يمكن استخدامها مع كتل مجموعة نقل الحركة لالتقاط الأقراص.
- صف تدفق البرنامج في مشروع يحتوي على روبوت الواقع الافتراضي الذي يلتقط قرصًا ويحمله ثم يسقطه.
كيفية استخدام الكهرومغناطيس
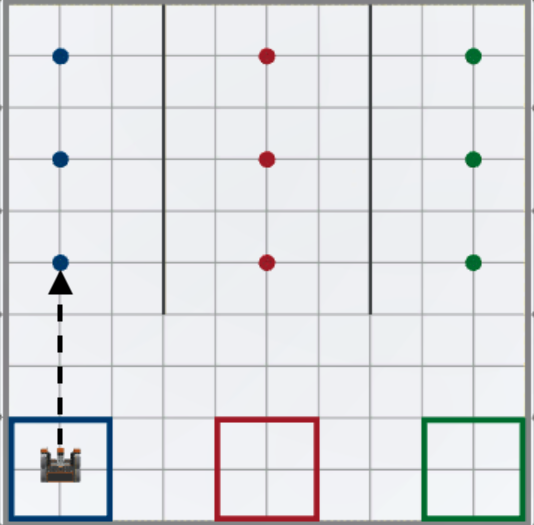
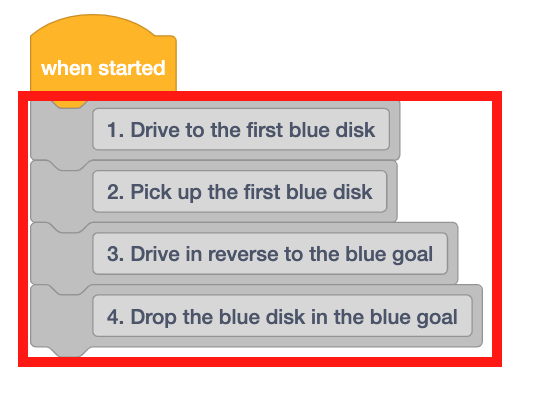
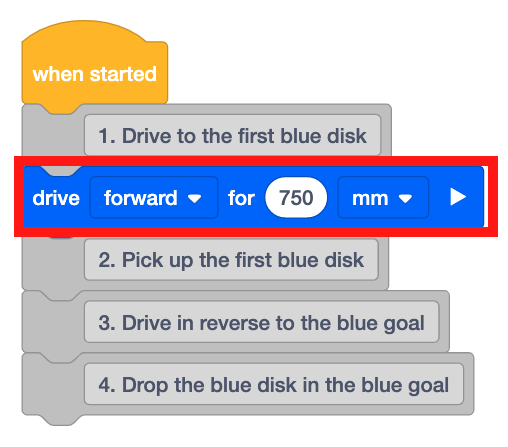
في هذا التحدي، سيكمل روبوت الواقع الافتراضي أربعة سلوكيات باستخدام كتل [Energize Electromagnet] و [Drive for] لوضع قرص أزرق في الهدف الأزرق. تنعكس هذه الخطوات أيضًا في تعليقات المشروع قيد الإنشاء.
-
أولاً: سيتقدم روبوت الواقع الافتراضي إلى القرص الأزرق الأول.
-
ثانيًا: يلتقط روبوت الواقع الافتراضي أول قرص أزرق.
-
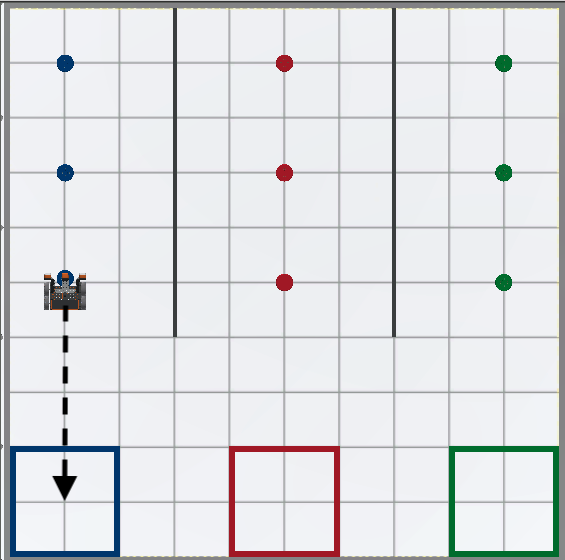
ثالثًا: سيقود روبوت الواقع الافتراضي في الاتجاه المعاكس إلى نقطة البداية في الهدف الأزرق.
-
أخيرًا: سيسقط روبوت الواقع الافتراضي القرص الأزرق في الهدف الأزرق.

-
سيستخدم هذا المشروع كتل التعليقات للمساعدة في تخطيط سلوكيات روبوت الواقع الافتراضي من خلال تنظيمها في أقسام أصغر داخل المشروع. أثناء بناء المشروع، سيتم وضع الكتل المرتبطة بكل سلوك مرغوب فيه أسفل التعليق المطابق.

-
ابدأ مشروعًا جديدًا في VEXcode VR واسم المشروع Unit8Lesson2.

-
اسحب أربع كتل [تعليق] إلى مساحة العمل. أضف تعليقات لكل خطوة من الخطوات الموضحة أعلاه.
-
يقع القرص الأزرق الأول على بعد 750 ملليمتر (مم) من نقطة بداية روبوت الواقع الافتراضي في ملعب Disk Mover. اسحب كتلة [Drive for] أسفل التعليق الأول واضبط المعلمة على 750 ملليمتر (مم).
لمعلوماتك
تم تقدير المسافة بين نقطة بداية روبوت الواقع الافتراضي والقرص الأزرق الأول باستخدام أبعاد كل مربع شبكة. يبلغ حجم كل مربع شبكي في ساحة اللعب الخاصة بمحرك الأقراص 200 مليمتر (مم) في 200 مليمتر (مم).
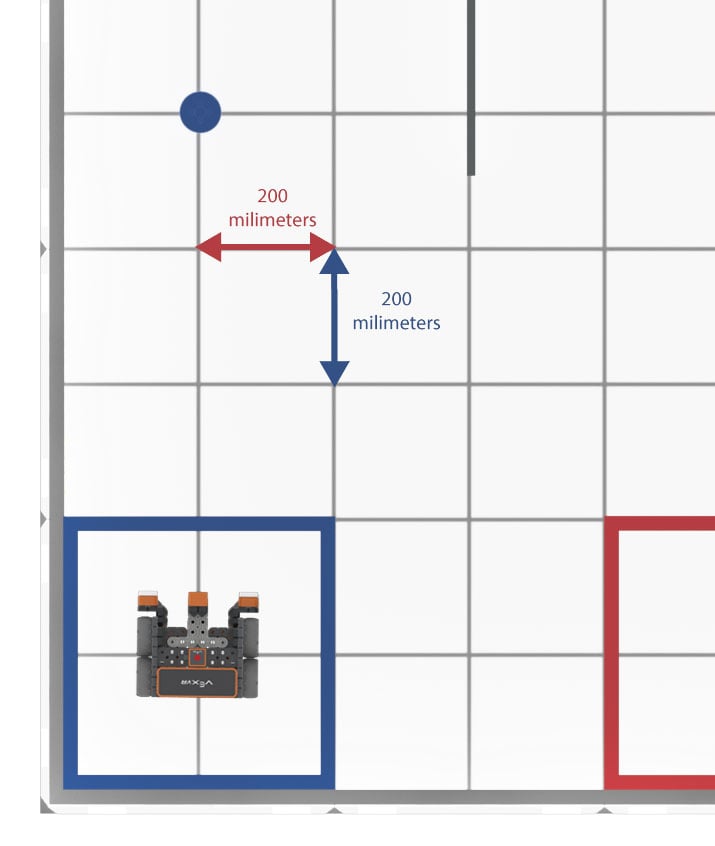
وباستخدام هذه المعلومات، يمكن تقدير أن القرص الأزرق الأول يقع على مسافة 800 مليمتر (مم) من مركز روبوت الواقع الافتراضي. نظرًا لأن المغناطيس الكهربائي موجود في مقدمة روبوت الواقع الافتراضي، فقد تكون المسافة بين المغناطيس الكهربائي والقرص الأزرق الأول أقصر قليلاً من 800 ملليمتر (مم).
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.