
पाठ 2: परियोजना की योजना बनाएँ
इस पाठ में, आप सीखेंगे कि डिस्क मूवर प्लेग्राउंडपर डिस्क को उठाने और छोड़ने के लिए [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक का उपयोग कैसे करें। आप मिनी चैलेंज में तीन नीली डिस्क को नीले लक्ष्य में ले जाने के लिए ड्राइवट्रेन ब्लॉक के साथ [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक का उपयोग करेंगे।
सीखने के परिणाम
- पहचानें कि [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक के दो अलग-अलग मोड हैं: बूस्ट या ड्रॉप।
- पहचानें कि [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक, जब बूस्ट पर सेट किया जाता है, तो इलेक्ट्रोमैग्नेट की ओर एक डिस्क को आकर्षित करता है।
- पहचानें कि [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक, जब ड्रॉप करने के लिए सेट किया जाता है, तो इलेक्ट्रोमैग्नेट द्वारा पकड़ी गई डिस्क को छोड़ देता है।
- पहचानें कि [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक एक स्टैक ब्लॉक है जिसका उपयोग डिस्क लेने के लिए ड्राइवट्रेन ब्लॉक के साथ किया जा सकता है।
- उस प्रोजेक्ट में प्रोग्राम प्रवाह का वर्णन करें जिसमें VR रोबोट एक डिस्क उठाता है, ले जाता है, फिर उसे छोड़ देता है।
विद्युत चुम्बक का उपयोग कैसे करें
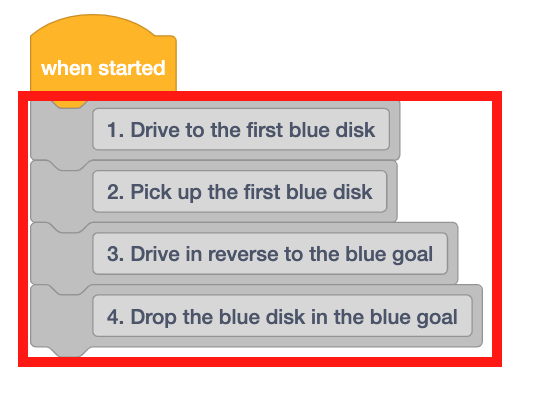
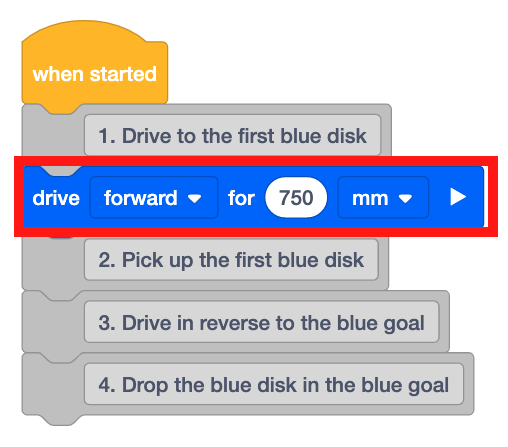
इस चुनौती में, वीआर रोबोट नीले लक्ष्य में एक नीली डिस्क रखने के लिए [एनर्जाइज़ इलेक्ट्रोमैग्नेट] और [ड्राइव फॉर] ब्लॉक का उपयोग करके चार व्यवहारों को पूरा करेगा। ये कदम निर्माणाधीन परियोजना की टिप्पणियों में भी प्रतिबिंबित होते हैं।
-
पहला: वी.आर. रोबोट पहली नीली डिस्क की ओर आगे बढ़ेगा।
-
दूसरा: वी.आर. रोबोट पहली नीली डिस्क उठाएगा।
-
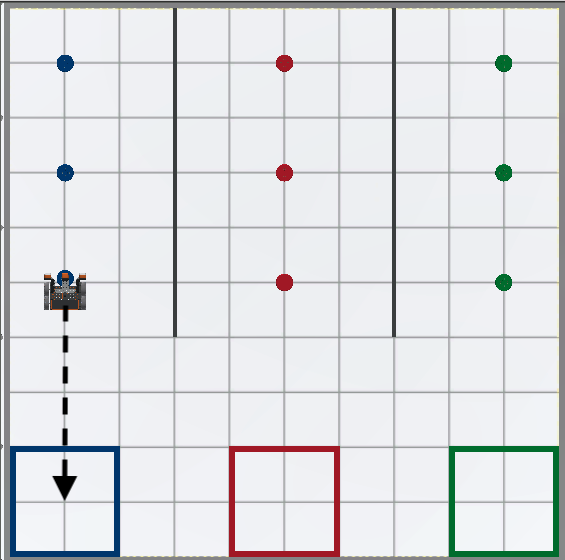
तीसरा: वीआर रोबोट नीले गोल में प्रारंभिक स्थिति की ओर उल्टी दिशा में चलेगा।
-
अंत में: वीआर रोबोट नीली डिस्क को नीले गोल में गिरा देगा।

-
यह परियोजना वीआर रोबोट के व्यवहार की योजना बनाने में मदद के लिए टिप्पणी ब्लॉकों का उपयोग करेगी, तथा उन्हें परियोजना के भीतर छोटे-छोटे खंडों में व्यवस्थित करेगी। प्रोजेक्ट बनाते समय, प्रत्येक वांछित व्यवहार से जुड़े ब्लॉक को मिलान वाली टिप्पणी के नीचे रखा जाएगा।

-
VEXcode VR में एक नया प्रोजेक्ट शुरू करें और प्रोजेक्ट का नाम Unit8Lesson2रखें।

-
चार [टिप्पणी] ब्लॉकों को कार्यक्षेत्र में खींचें. ऊपर बताए गए प्रत्येक चरण के लिए टिप्पणियाँ जोड़ें।
-
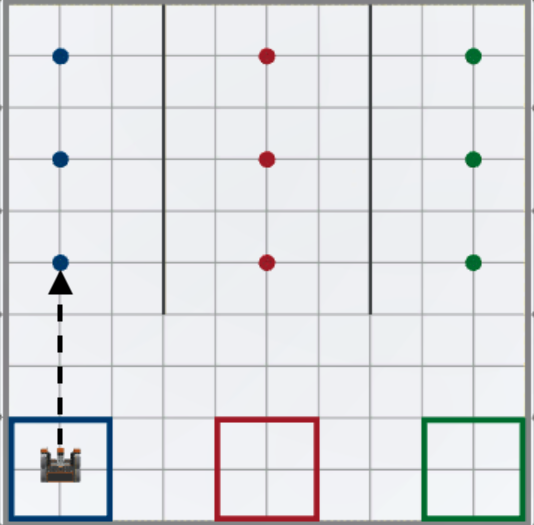
पहली नीली डिस्क डिस्क मूवर प्लेग्राउंडपर वीआर रोबोट के शुरुआती बिंदु से 750 मिलीमीटर (मिमी) दूर है। पहली टिप्पणी के नीचे [Drive for] ब्लॉक खींचें और पैरामीटर को 750 मिलीमीटर (मिमी) पर सेट करें।
आपकी जानकारी के लिए
वी.आर. रोबोट के प्रारंभिक बिंदु और पहली नीली डिस्क के बीच की दूरी का अनुमान प्रत्येक ग्रिड वर्ग के आयामों का उपयोग करके लगाया गया था। डिस्क मूवर प्लेग्राउंड पर प्रत्येक ग्रिड वर्ग 200 मिलीमीटर (मिमी) x 200 मिलीमीटर (मिमी) है।
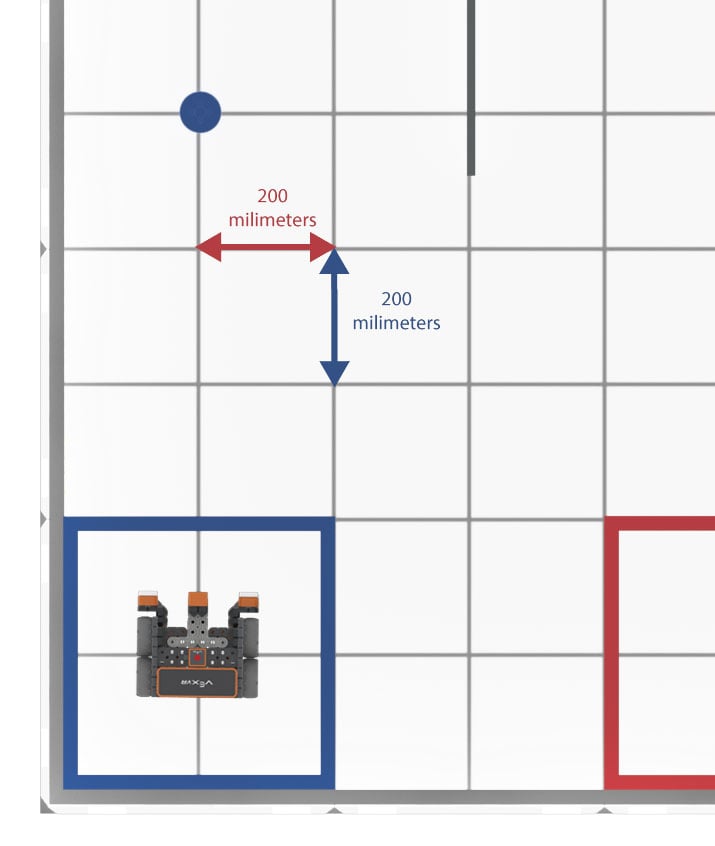
इस जानकारी का उपयोग करके, यह अनुमान लगाया जा सकता है कि पहली नीली डिस्क वीआर रोबोट के केंद्र से 800 मिलीमीटर (मिमी) दूर है। चूंकि इलेक्ट्रोमैग्नेट वीआर रोबोट के सामने की ओर है, इसलिए इलेक्ट्रोमैग्नेट और पहली नीली डिस्क के बीच की दूरी 800 मिलीमीटर (मिमी) से थोड़ी कम हो सकती है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।