
പാഠം 2: പദ്ധതി ആസൂത്രണം ചെയ്യുക
ഈ പാഠത്തിൽ, ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ൽ ഡിസ്കുകൾ എടുക്കുന്നതിനും ഇടുന്നതിനും [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്ക് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും. മിനി ചലഞ്ചിൽ മൂന്ന് നീല ഡിസ്കുകൾ എടുത്ത് നീല ഗോളിലേക്ക് നീക്കാൻ നിങ്ങൾ ഡ്രൈവ്ട്രെയിൻ ബ്ലോക്കുകളുള്ള [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്ക് ഉപയോഗിക്കും.
പഠന ഫലങ്ങൾ
- [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്കിന് രണ്ട് വ്യത്യസ്ത മോഡുകൾ ഉണ്ടെന്ന് തിരിച്ചറിയുക: ബൂസ്റ്റ് അല്ലെങ്കിൽ ഡ്രോപ്പ്.
- [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്ക്, ബൂസ്റ്റ് ചെയ്യാൻ സജ്ജമാക്കുമ്പോൾ, ഇലക്ട്രോമാഗ്നറ്റിലേക്ക് ഒരു ഡിസ്കിനെ ആകർഷിക്കുന്നുവെന്ന് തിരിച്ചറിയുക.
- [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്ക്, ഡ്രോപ്പ് ചെയ്യാൻ സജ്ജമാക്കുമ്പോൾ, ഇലക്ട്രോമാഗ്നറ്റ് കൈവശം വച്ചിരിക്കുന്ന ഡിസ്ക് റിലീസ് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്ക് എന്നത് ഡ്രൈവ്ട്രെയിൻ ബ്ലോക്കുകൾക്കൊപ്പം ഡിസ്കുകൾ എടുക്കാൻ ഉപയോഗിക്കാവുന്ന ഒരു സ്റ്റാക്ക് ബ്ലോക്കാണെന്ന് തിരിച്ചറിയുക.
- VR റോബോട്ട് ഒരു ഡിസ്ക് എടുക്കുകയും, കൊണ്ടുപോകുകയും, പിന്നീട് ഉപേക്ഷിക്കുകയും ചെയ്യുന്ന ഒരു പ്രോജക്റ്റിലെ പ്രോഗ്രാം ഫ്ലോ വിവരിക്കുക.
വൈദ്യുതകാന്തികം എങ്ങനെ ഉപയോഗിക്കാം
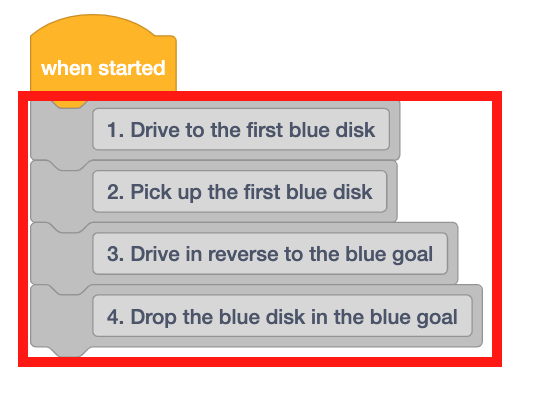
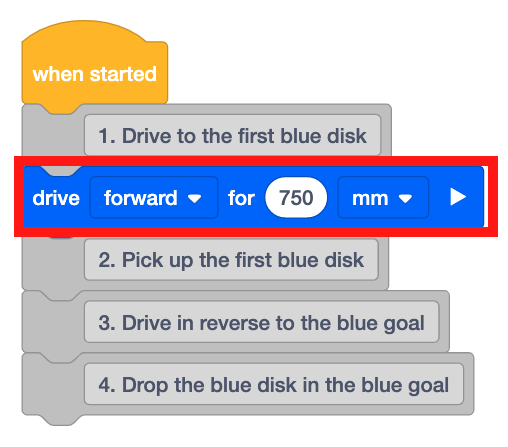
ഈ വെല്ലുവിളിയിൽ, [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്], [ഡ്രൈവ് ഫോർ] ബ്ലോക്കുകൾ എന്നിവ ഉപയോഗിച്ച് VR റോബോട്ട് നാല് പെരുമാറ്റങ്ങൾ പൂർത്തിയാക്കി നീല ഗോളിൽ ഒരു നീല ഡിസ്ക് സ്ഥാപിക്കും. നിർമ്മിക്കപ്പെടുന്ന പദ്ധതിയുടെ അഭിപ്രായങ്ങളിലും ഈ ഘട്ടങ്ങൾ പ്രതിഫലിക്കുന്നു.
-
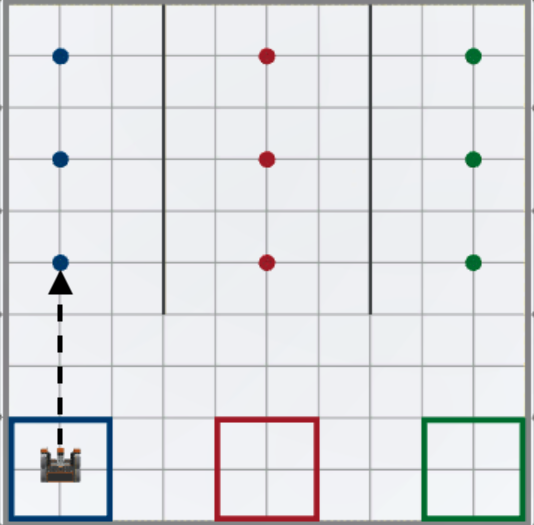
ആദ്യം: വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്കിലേക്ക് മുന്നോട്ട് പോകും.
-
രണ്ടാമത്തേത്: വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുക്കും.
-
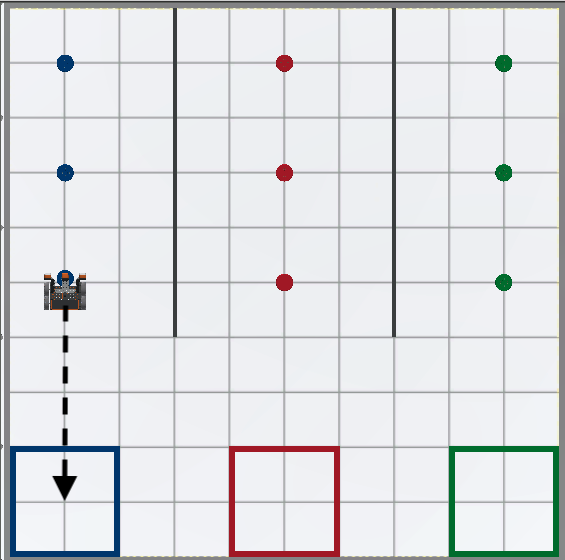
മൂന്നാമത്: വിആർ റോബോട്ട് നീല ഗോളിൽ ആരംഭ സ്ഥാനത്തേക്ക് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യും.
-
ഒടുവിൽ: വി.ആർ. റോബോട്ട് നീല ഡിസ്ക് നീല ഗോളിലേക്ക് ഇടും.

-
ഈ പ്രോജക്റ്റ്, VR റോബോട്ടിന്റെ പെരുമാറ്റരീതികൾ ആസൂത്രണം ചെയ്യാൻ സഹായിക്കുന്നതിന് കമന്റ് ബ്ലോക്കുകൾ ഉപയോഗിക്കും, അവയെ പ്രോജക്റ്റിനുള്ളിൽ ചെറിയ ഭാഗങ്ങളായി ക്രമീകരിക്കും. പ്രോജക്റ്റ് നിർമ്മിക്കുമ്പോൾ, ആവശ്യമുള്ള ഓരോ പെരുമാറ്റവുമായും ബന്ധപ്പെട്ട ബ്ലോക്കുകൾ പൊരുത്തപ്പെടുന്ന കമന്റിന് കീഴിൽ സ്ഥാപിക്കും.

-
VEXcode VR-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് പ്രോജക്റ്റിന് എന്ന് പേരിടുക Unit8Lesson2.

-
വർക്ക്സ്പെയ്സിലേക്ക് നാല് [അഭിപ്രായം] ബ്ലോക്കുകൾ വലിച്ചിടുക. മുകളിൽ വിവരിച്ച ഓരോ ഘട്ടത്തിനും അഭിപ്രായങ്ങൾ ചേർക്കുക.
-
ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ലെ VR റോബോട്ടിന്റെ ആരംഭ പോയിന്റിൽ നിന്ന് 750 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) അകലെയാണ് ആദ്യത്തെ നീല ഡിസ്ക്. ആദ്യത്തെ കമന്റിന് താഴെയുള്ള [Drive for] ബ്ലോക്ക് ഡ്രാഗ് ചെയ്ത് പാരാമീറ്റർ 750 മില്ലിമീറ്ററായി (mm) സജ്ജമാക്കുക.
നിങ്ങളുടെ അറിവിലേക്കായി
ഓരോ ഗ്രിഡ് സ്ക്വയറിന്റെയും അളവുകൾ ഉപയോഗിച്ച് VR റോബോട്ടിന്റെ ആരംഭ പോയിന്റും ആദ്യത്തെ നീല ഡിസ്കും തമ്മിലുള്ള ദൂരം കണക്കാക്കി. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് ലെ ഓരോ ഗ്രിഡ് സ്ക്വയറും 200 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) 200 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) ആണ്.
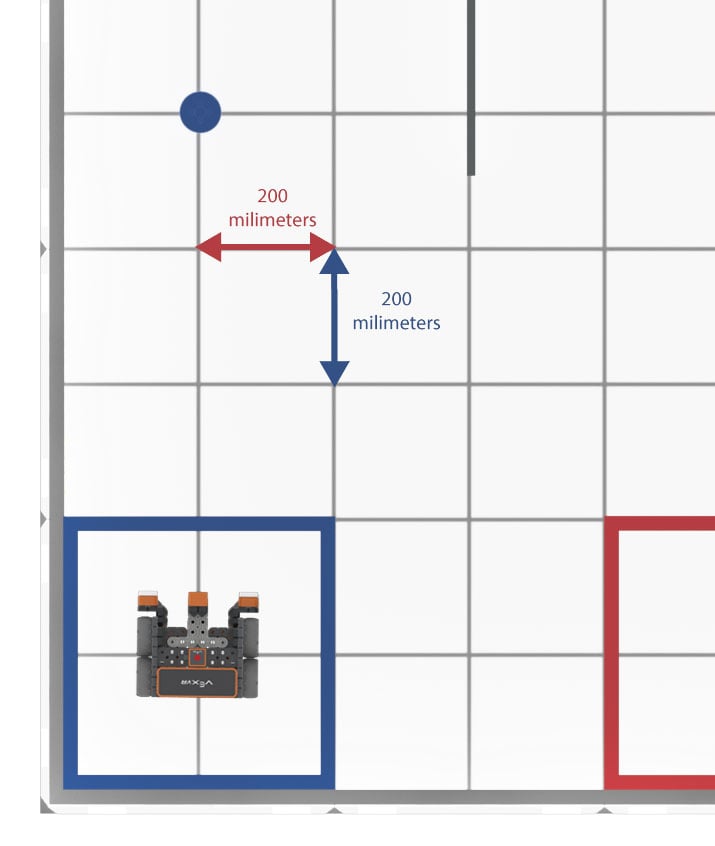
ഈ വിവരങ്ങൾ ഉപയോഗിച്ച്, ആദ്യത്തെ നീല ഡിസ്ക് VR റോബോട്ടിന്റെ നിന്ന് 800 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) അകലെയാണെന്ന് കണക്കാക്കാം. VR റോബോട്ടിന്റെ മുൻവശത്താണ് ഇലക്ട്രോമാഗ്നറ്റ് ഉള്ളതിനാൽ, ഇലക്ട്രോമാഗ്നറ്റും ആദ്യത്തെ നീല ഡിസ്കും തമ്മിലുള്ള ദൂരം 800 മില്ലിമീറ്ററിനേക്കാൾ (mm) അല്പം കുറവായിരിക്കാം.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.