
الدرس 2: استخدام الكهرومغناطيس
-
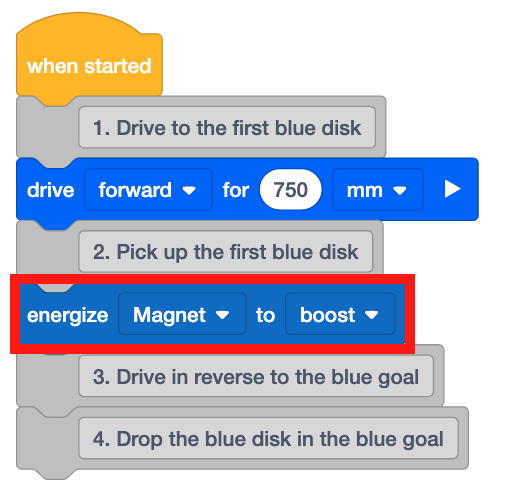
بمجرد وصول روبوت الواقع الافتراضي إلى القرص الأزرق الأول، يجب على روبوت الواقع الافتراضي تعزيز المغناطيس الكهربائي باستخدام كتلة [تنشيط المغناطيس الكهربائي]. اسحب كتلة [تنشيط المغناطيس الكهربائي] أسفل التعليق الثاني.
لمعلوماتك
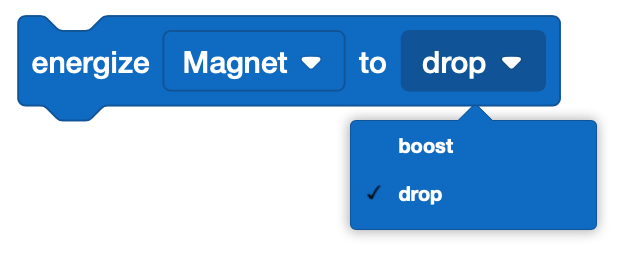
تحتوي كتلة [Energize Electromagnet] على وضعين مختلفين: "boost" و "drop". يقوم "التعزيز" بتشغيل المغناطيس الكهرومغناطيسي وإنشاء المجال الكهرومغناطيسي اللازم لجذب قرص إلى المغناطيس الكهرومغناطيسي.

يعكس "السقوط" تيار المغناطيس الكهربائي ويحرر أي أقراص يحملها المغناطيس الكهربائي.
استخدام كتل المفاتيح
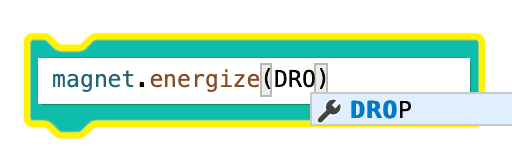
هذا هو كتلة Switch [Energize electromagnet].

يمكنك تغيير معلمة كتلة Switch [Energize electromagnet] عن طريق استبدال كلمة "BOOST" بكلمة "DROP" بين قوسين. تأكد من استخدام جميع الأحرف الكبيرة عند تغيير المعلمة.
-
بعد ذلك، سيعود روبوت الواقع الافتراضي إلى نقطة البداية مع القرص الأزرق. ضع كتلة [Drive for] أسفل التعليق الثالث. اضبط معلمات كتلة [Drive for] لعكس 750 ملليمتر (مم).

-
بمجرد دخول الهدف الأزرق، سيحتاج روبوت الواقع الافتراضي إلى تحرير القرص الأزرق. أضف كتلة [تنشيط المغناطيس الكهربائي] أسفل التعليق الرابع، واضبطها على "إسقاط".

-
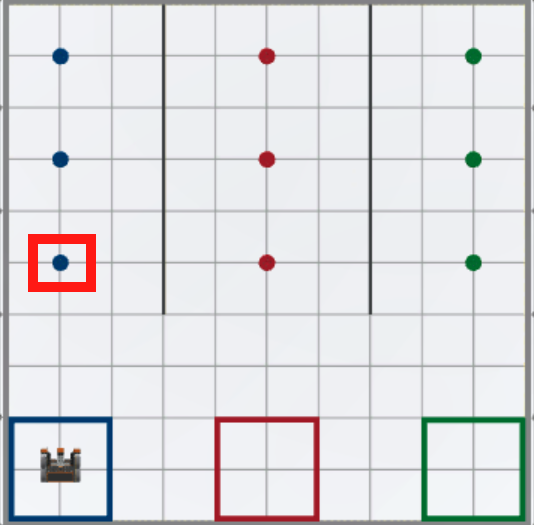
افتح Disk Mover Playground إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
-
يلتقط روبوت الواقع الافتراضي أول قرص أزرق عن طريق تنشيط الكهرومغناطيس، ثم يقود في الاتجاه المعاكس إلى الهدف الأزرق ويسقط القرص الأزرق.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.