
Leçon 2 : Utilisation de l'électroaimant
-
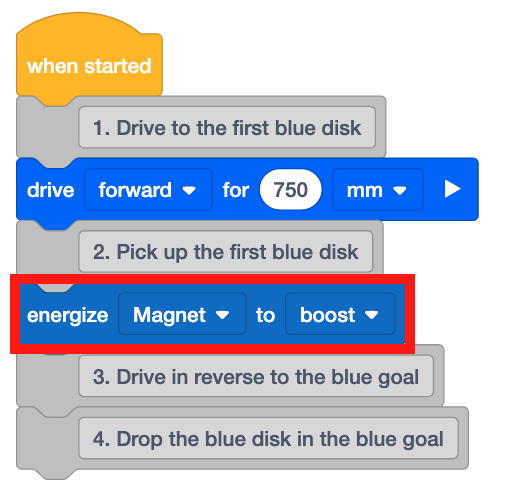
Une fois que le robot VR atteint le premier disque bleu, le robot VR doit booster l'électro-aimant à l'aide du bloc [Énergiser l'électro-aimant]. Faites glisser le bloc [Énergiser l'électro-aimant] sous le deuxième commentaire.
Pour votre information
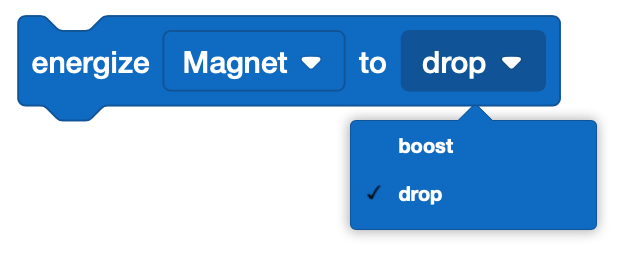
Le bloc [Energize Electromagnet] a deux modes différents : « boost » et « drop ». « Boost » allume l'électroaimant et crée le champ électromagnétique nécessaire pour attirer un disque vers l'électroaimant.

‘Drop’ inverse le courant de l'électroaimant et libère tous les disques maintenus par l'électroaimant.
Utilisation des blocs de commutation
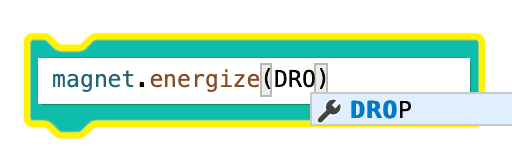
Il s'agit du bloc Switch [Energize electroagnet].

Vous pouvez modifier le paramètre du bloc Switch [Energize electroagnet] en remplaçant « BOOST » par le mot « DROP » entre parenthèses. Assurez-vous d'utiliser toutes les lettres majuscules lorsque vous modifiez le paramètre.
-
Ensuite, le robot VR retournera en marche arrière au point de départ avec le disque bleu. Placez un bloc [Drive for] sous le troisième commentaire. Réglez les paramètres du bloc [Drive for] pour inverser 750 millimètres (mm).

-
Une fois à l'intérieur de l'objectif bleu, le robot VR devra libérer le disque bleu. Ajoutez un bloc [Energize Electromagnet] sous le quatrième commentaire et définissez sur « Drop ».

-
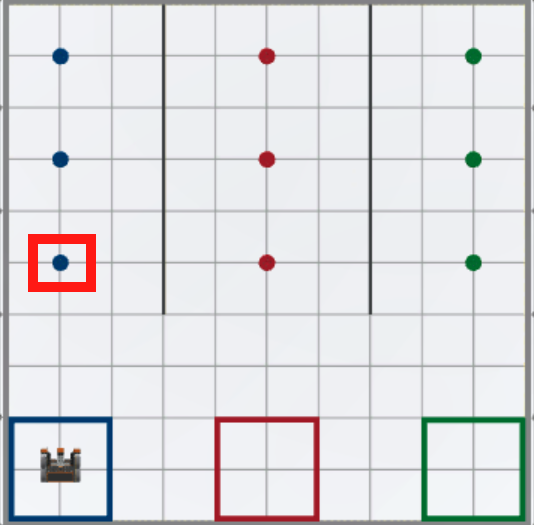
Ouvrez le Disk Mover Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Le robot VR prend le premier disque bleu en activant l'électro-aimant, puis retourne en marche arrière vers le but bleu et laisse tomber le disque bleu.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.