
الدرس 4: نقل القرص الأزرق
نقل قرص واحد من كل لون
في الدرس 3، قمت بإنشاء مشروع لجعل روبوت الواقع الافتراضي يلتقط ويسقط كل قرص من الأقراص الزرقاء الثلاثة في الهدف الأزرق في ملعب Disk Mover.
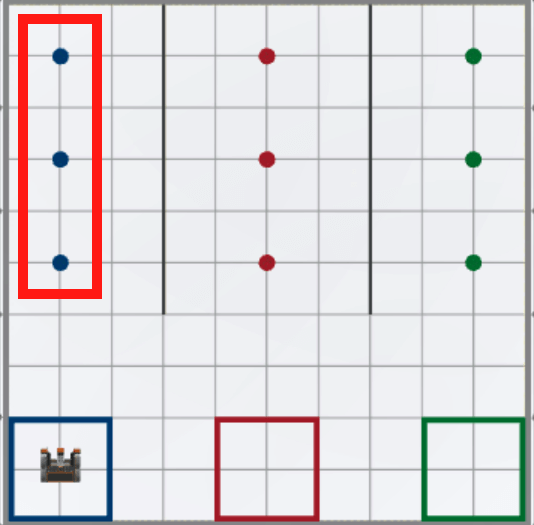
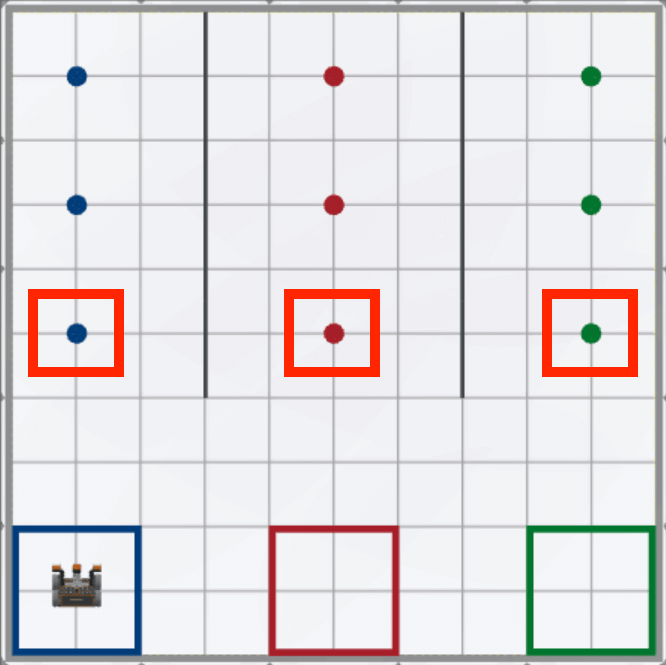
في هذا الدرس، ستقوم الآن بإنشاء مشروع لالتقاط ونقل قرص واحد من كل لون إلى هدفه الملون المقابل في ملعب Disk Mover!
- سيحتاج روبوت الواقع الافتراضي إلى تكرار سلوكيات القيادة إلى القرص، والتقاطه، والاستدارة، ثم العودة إلى
الهدف الملون مرة واحدة لكل لون. لكي يكرر روبوت الواقع الافتراضي إجراءات التقاط وإسقاط قرص واحد من كل
لون، سيحتاج روبوت الواقع الافتراضي إلى أداء السلوكيات التالية ثلاث مرات:
-
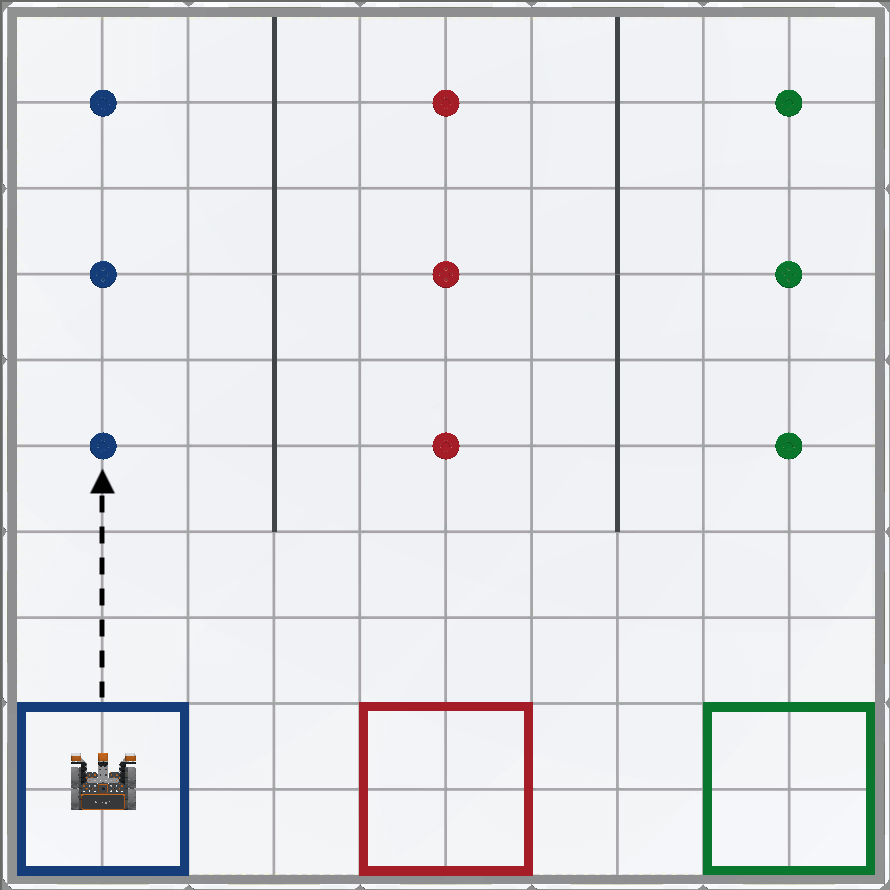
أولاً، توجه إلى القرص الأزرق الأول باستخدام مستشعر العين السفلية.
-
ثم التقط القرص الأزرق الأول.

-
بعد ذلك، استدر.
-
بعد ذلك، ارجع إلى الهدف باستخدام مستشعر المسافة وأسقط القرص.

-
-
ابدأ مشروعًا جديدًا في VEXcode VR واسم المشروع Unit8Lesson4.

-
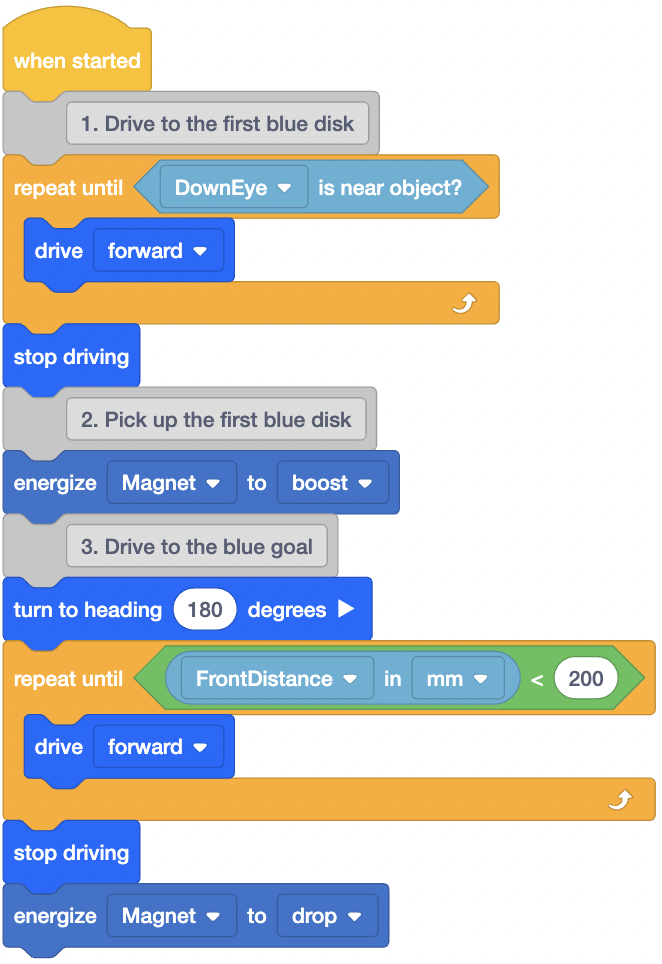
قم ببناء التعليمات البرمجية التالية التي توجه روبوت الواقع الافتراضي لإكمال السلوكيات الأربعة المذكورة أعلاه.
- افتح Disk Mover Playground وقم بتشغيل المشروع.
-
عند تشغيل هذا المشروع، سيقوم روبوت الواقع الافتراضي بقيادة القرص الأزرق الأول والتقاطه، والاستدارة، والقيادة إلى الهدف الأزرق، وإسقاط القرص.

-
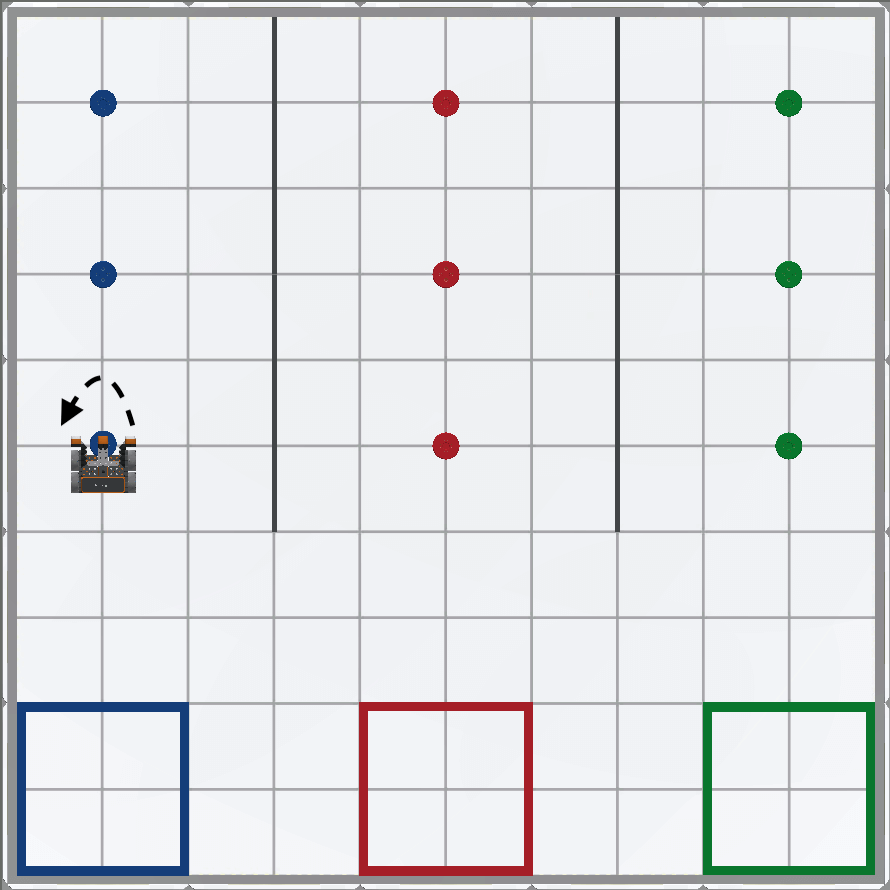
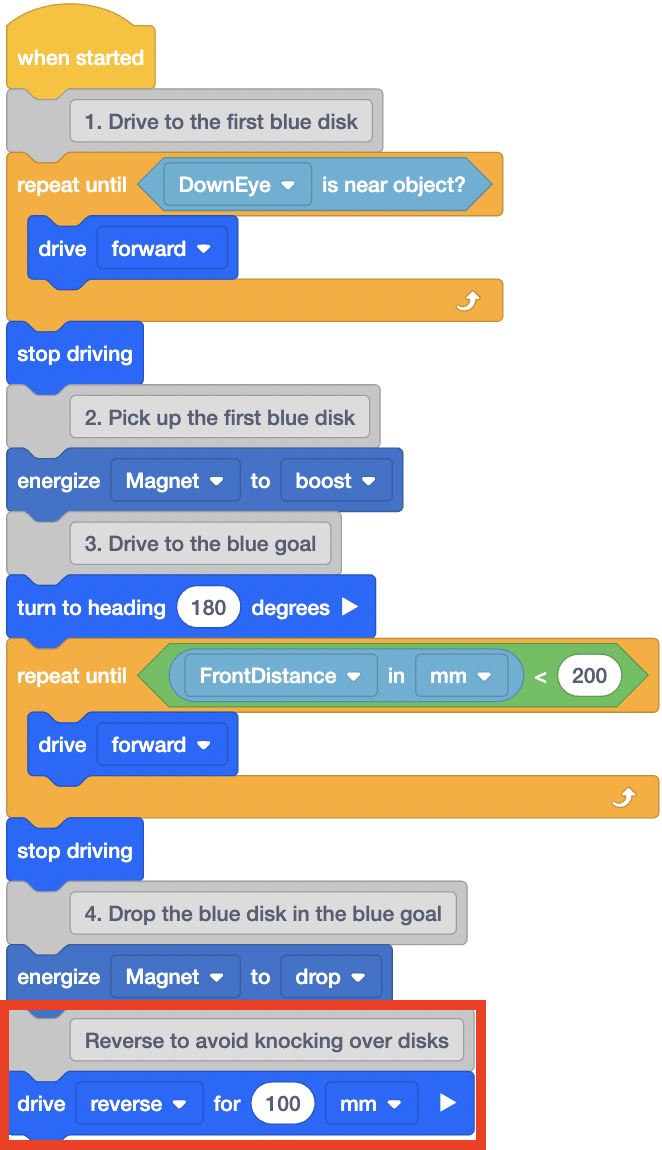
من أجل جمع القرص الملون التالي، سيحتاج روبوت الواقع الافتراضي إلى القيادة نحو الهدف الملون التالي. ومع ذلك، من أجل منع الاصطدام بالقرص الأزرق، سيحتاج روبوت الواقع الافتراضي الآن إلى الابتعاد عن طريق القرص. للقيام بذلك، سيحتاج روبوت الواقع الافتراضي إلى عكس 100 ملليمتر (مم)، أو نصف طول مربع الشبكة على الملعب.

-
أضف كتلة [Drive for] إلى التعليمة البرمجية واضبط المعلمة على "الرجوع للخلف" لـ 100 ملليمتر (مم).
-
سيحتاج روبوت الواقع الافتراضي الآن إلى الانعطاف يسارًا لمواجهة الهدف الملون التالي.

-
أضف كتلة [Turn to heading] إلى التعليمة البرمجية واضبط المعلمة على 90 درجة حتى يواجه روبوت الواقع الافتراضي الهدف التالي.

قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.