
पाठ 4: नीली डिस्क को स्थानांतरित करें
प्रत्येक रंग की एक डिस्क ले जाएँ
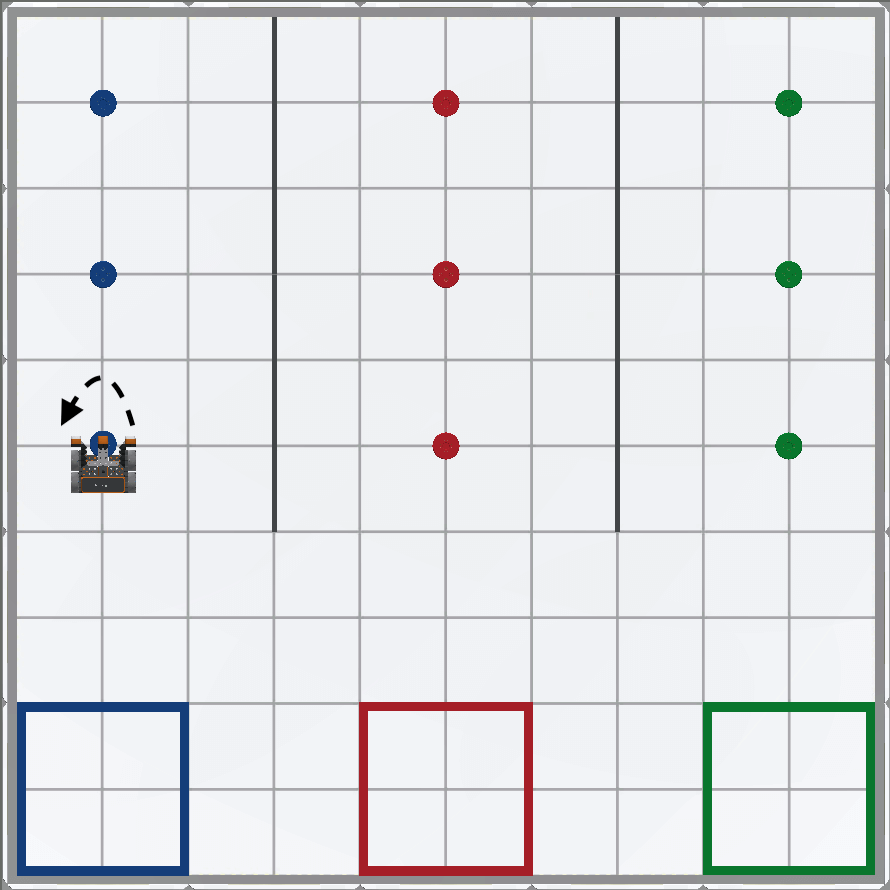
पाठ 3 में, आपने एक प्रोजेक्ट बनाया था जिसमें VR रोबोट को तीन नीली डिस्कों में से प्रत्येक को उठाकर डिस्क मूवर प्लेग्राउंडपर नीले गोल में छोड़ना था।
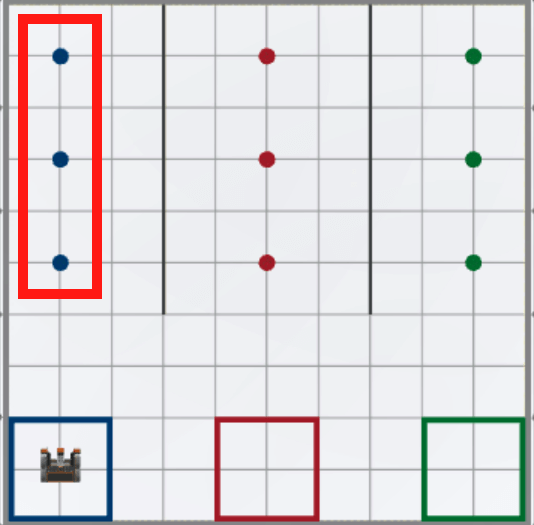
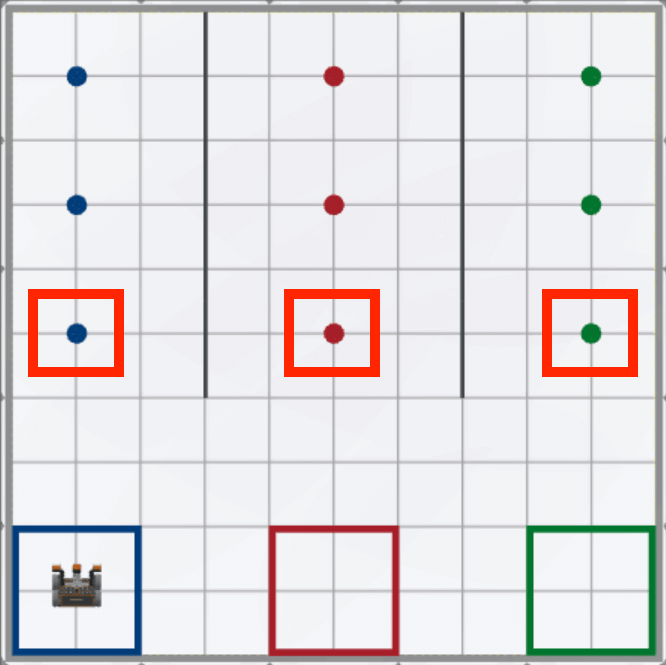
इस पाठ में, अब आप डिस्क मूवर प्लेग्राउंडमें प्रत्येक रंग की एक डिस्क को उठाकर उसके संगत रंगीन लक्ष्य में ले जाने के लिए एक प्रोजेक्ट बनाएंगे!
- वी.आर. रोबोट को डिस्क तक जाने, उसे उठाने, घूमने, तथा फिर प्रत्येक रंग के लिए रंगीन लक्ष्य तक वापस जाने के व्यवहार को एक बार दोहराना होगा। वीआर रोबोट द्वारा प्रत्येक रंग की एक डिस्क को उठाने और छोड़ने की क्रिया को दोहराने के लिए, वीआर रोबोट को निम्नलिखित व्यवहार तीन बार करने की आवश्यकता होगी:
-
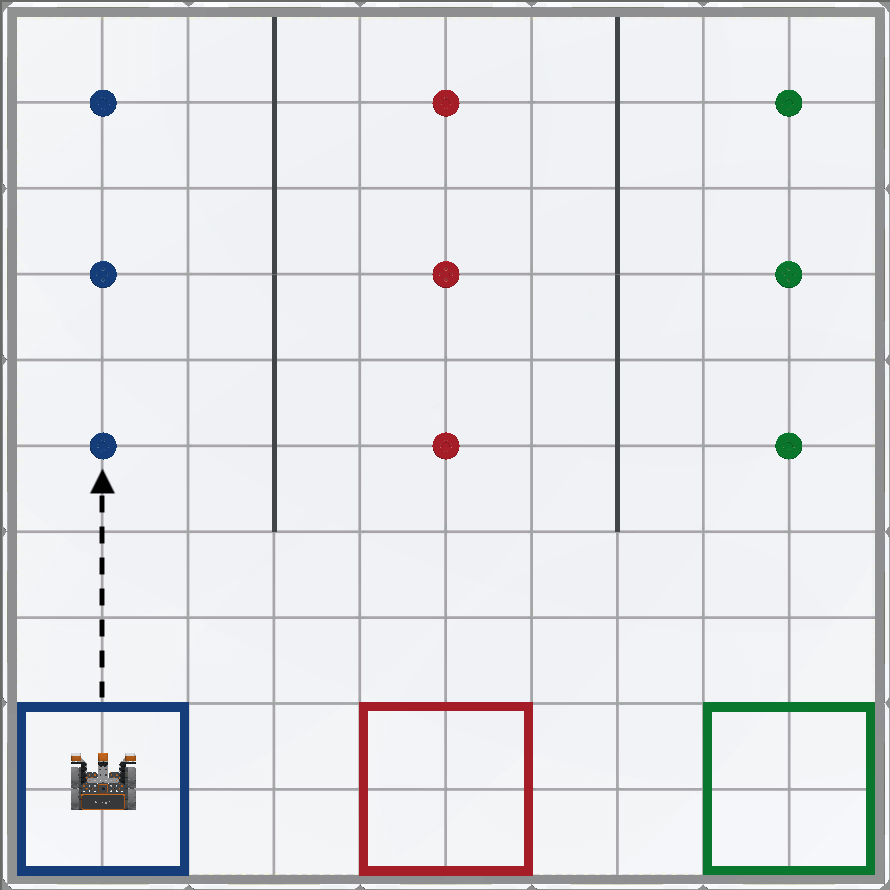
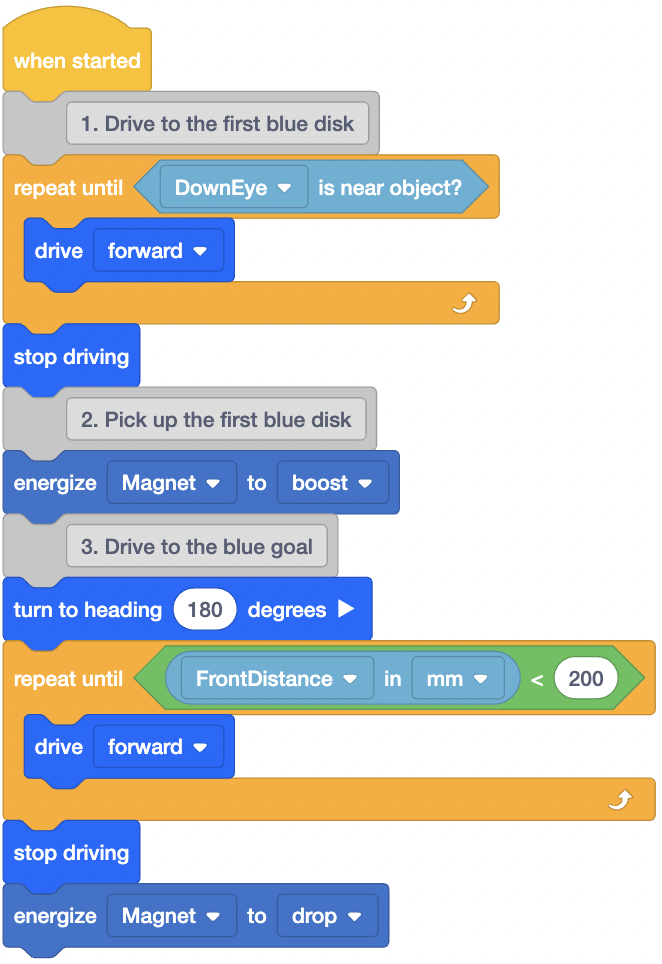
सबसे पहले, डाउन आई सेंसर का उपयोग करके पहली नीली डिस्क की ओर आगे बढ़ें।
-
फिर, पहली नीली डिस्क उठाएँ।
-
अब, घूमें।
-
फिर, दूरी सेंसर का उपयोग करके लक्ष्य तक वापस जाएं और डिस्क को छोड़ दें।

-
-
VEXcode VR में एक नया प्रोजेक्ट शुरू करें और प्रोजेक्ट का नाम Unit8Lesson4रखें।

-
निम्नलिखित कोड बनाएं जो VR रोबोट को ऊपर सूचीबद्ध चार व्यवहारों को पूरा करने का निर्देश देता है।
- डिस्क मूवर प्लेग्राउंड खोलें और प्रोजेक्ट चलाएं।
-
जब यह परियोजना चलाई जाएगी, तो वीआर रोबोट गाड़ी चलाएगा और पहली नीली डिस्क उठाएगा, घूमेगा, नीले लक्ष्य तक जाएगा, और डिस्क को नीचे गिरा देगा।

-
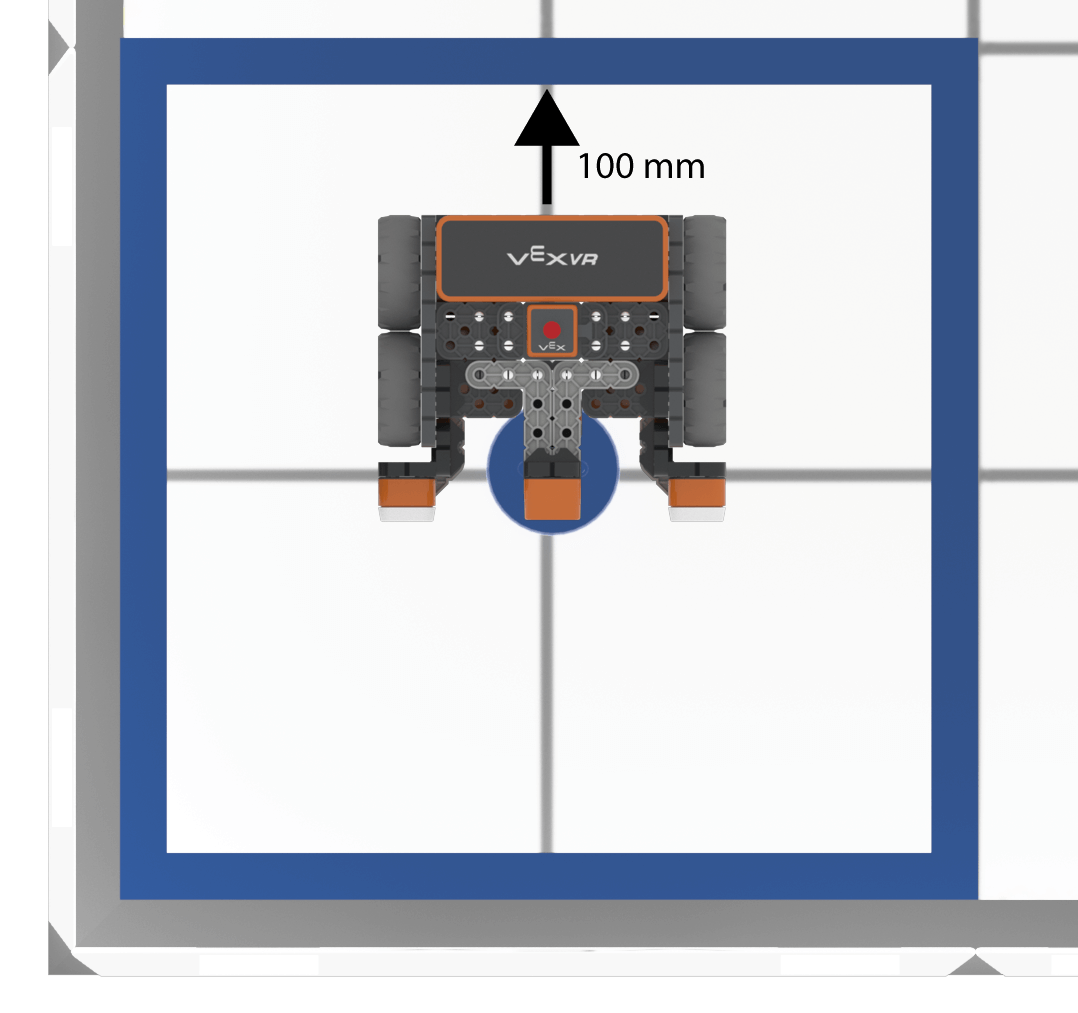
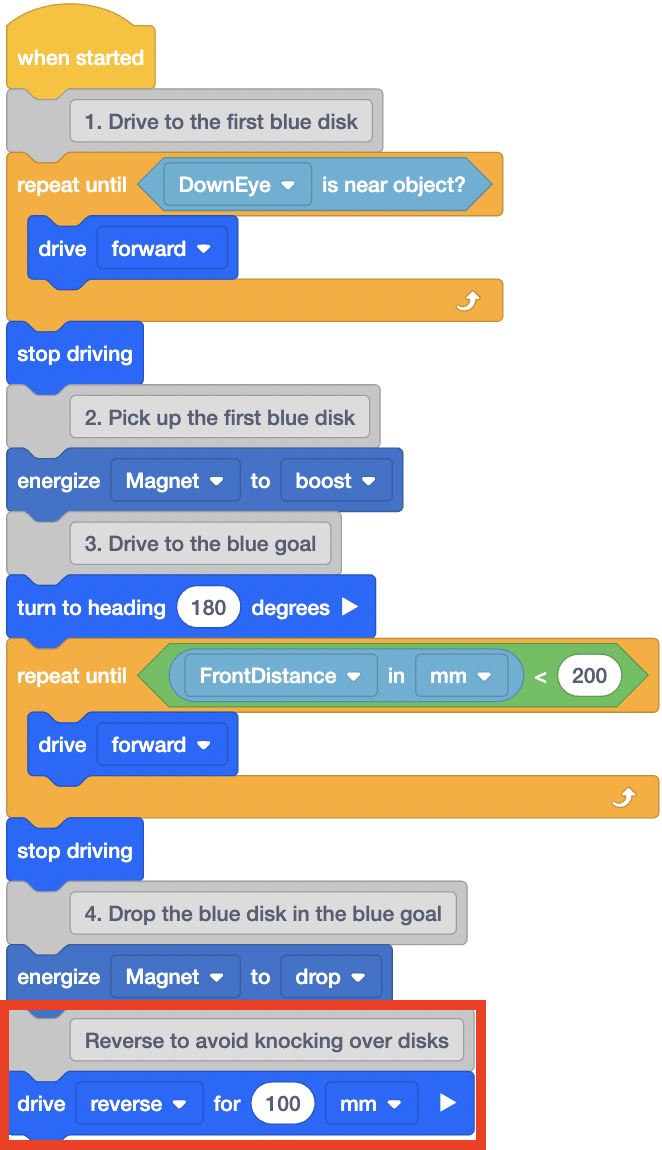
अगली रंगीन डिस्क एकत्र करने के लिए, वीआर रोबोट को अगले रंगीन लक्ष्य की ओर बढ़ना होगा। हालाँकि, नीली डिस्क से टकराने से बचने के लिए, वीआर रोबोट को अब डिस्क के रास्ते से हटना होगा। ऐसा करने के लिए, वीआर रोबोट को खेल के मैदान पर 100 मिलीमीटर (मिमी) या ग्रिड वर्ग की आधी लंबाई को उलटना होगा।
-
कोड में [ड्राइव फॉर] ब्लॉक जोड़ें और पैरामीटर को 100 मिलीमीटर (मिमी) के लिए “रिवर्स” पर सेट करें।
-
वीआर रोबोट को अब अगले रंगीन लक्ष्य का सामना करने के लिए बाईं ओर मुड़ना होगा।

-
कोड में [Turn to heading] ब्लॉक जोड़ें और वीआर रोबोट को अगले लक्ष्य का सामना करने के लिए पैरामीटर को 90 डिग्री पर सेट करें।

इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।