
Lição 4: Mova um disco azul
Mover um disco de cada cor
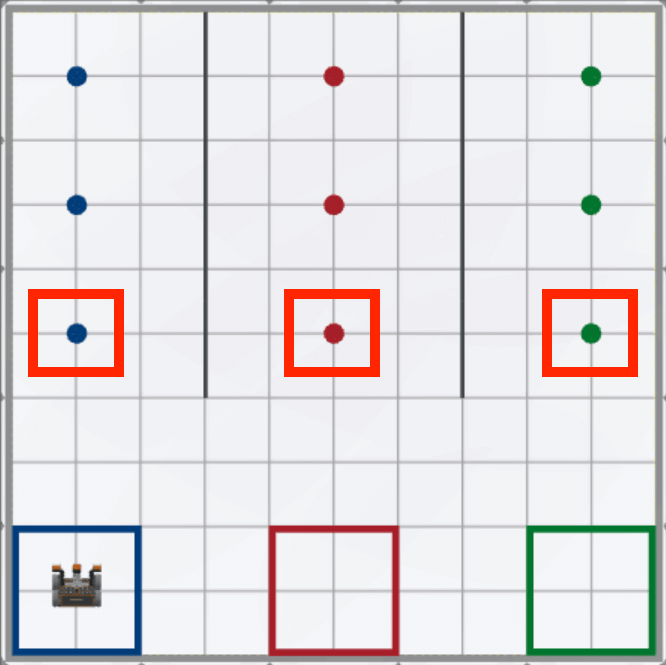
Na Lição 3, você criou um projeto para que o Robô VR pegasse e soltasse cada um dos três discos azuis na meta azul no Disk Mover Playground.

Nesta lição, agora você criará um projeto para pegar e mover um disco de cada cor para a meta colorida correspondente no Playground do Disk Mover!
- O Robô VR precisará repetir os comportamentos de dirigir até o disco, pegá-lo, virar e depois voltar para a meta colorida uma vez para cada cor. Para que o Robô VR repita as ações de pegar e soltar um disco de cada cor, o Robô VR precisará executar os seguintes comportamentos três vezes:
-
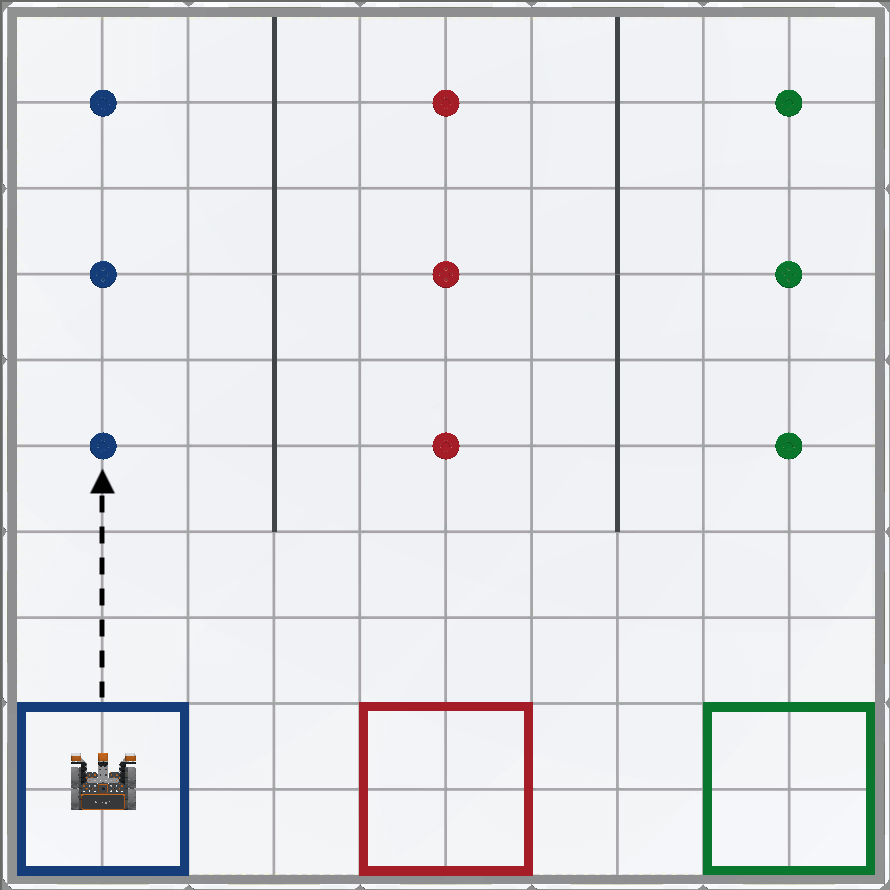
Primeiro, dirija-se para o primeiro disco azul usando o Down Eye Sensor.
-
Em seguida, pegue o primeiro disco azul.

-
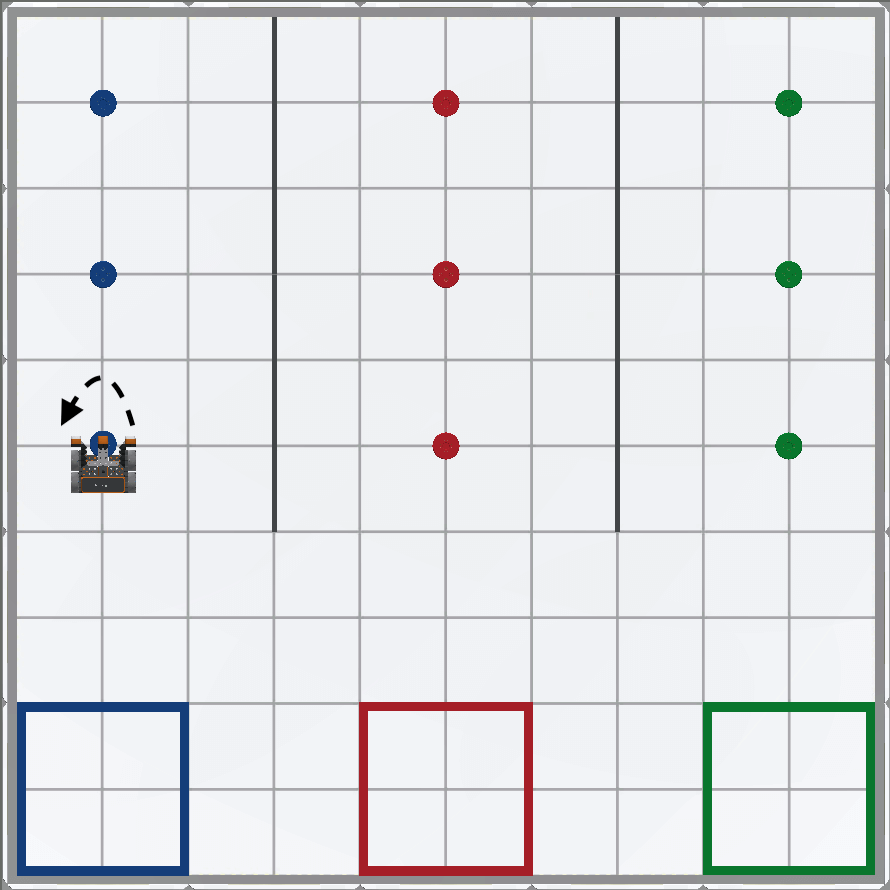
Em seguida, vire-se.
-
Em seguida, volte para a meta usando o Sensor de Distância e solte o disco.

-
-
Inicie um novo projeto no VEXcode VR e nomeie o projeto Unit8Lesson4.

-
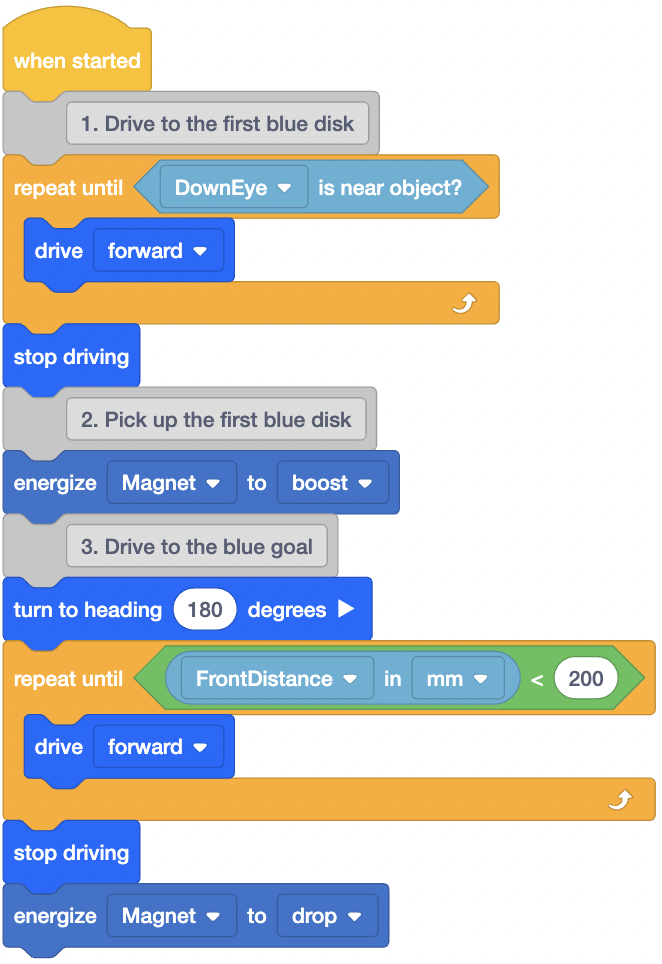
Crie o código a seguir que instrui o Robô de RV a concluir os quatro comportamentos listados acima.
- Abra o Disk Mover Playground e execute o projeto.
-
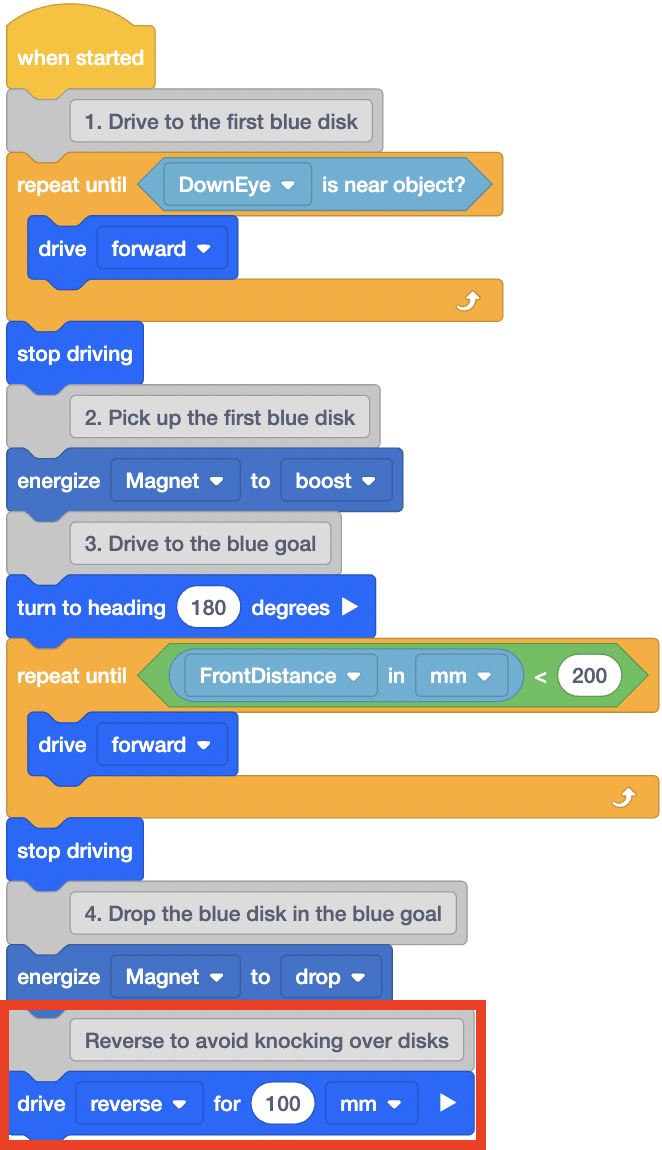
Quando este projeto é executado, o Robô VR irá conduzir e pegar o primeiro disco azul, virar, conduzir para a meta azul e soltar o disco.

-
Para coletar o próximo disco colorido, o Robô VR precisará dirigir-se para a próxima meta colorida. No entanto, para evitar a colisão com o disco azul, o robô VR agora precisará sair do caminho do disco. Para fazer isso, o Robô VR precisará inverter 100 milímetros (mm), ou metade do comprimento de uma grade quadrada no Playground.

-
Adicione um bloco [Drive for] ao código e defina o parâmetro como "reverse" para 100 milímetros (mm).
-
O Robô VR agora precisará virar à esquerda para enfrentar o próximo gol colorido.

-
Adicione um bloco [Turn to heading] ao código e defina o parâmetro para 90 graus para que o Robô VR enfrente o próximo objetivo.

Selecione o botão Seguinte para continuar com o resto desta lição.