
পাঠ ৪: একটি নীল ডিস্ক সরানো
প্রতিটি রঙের একটি ডিস্ক সরান
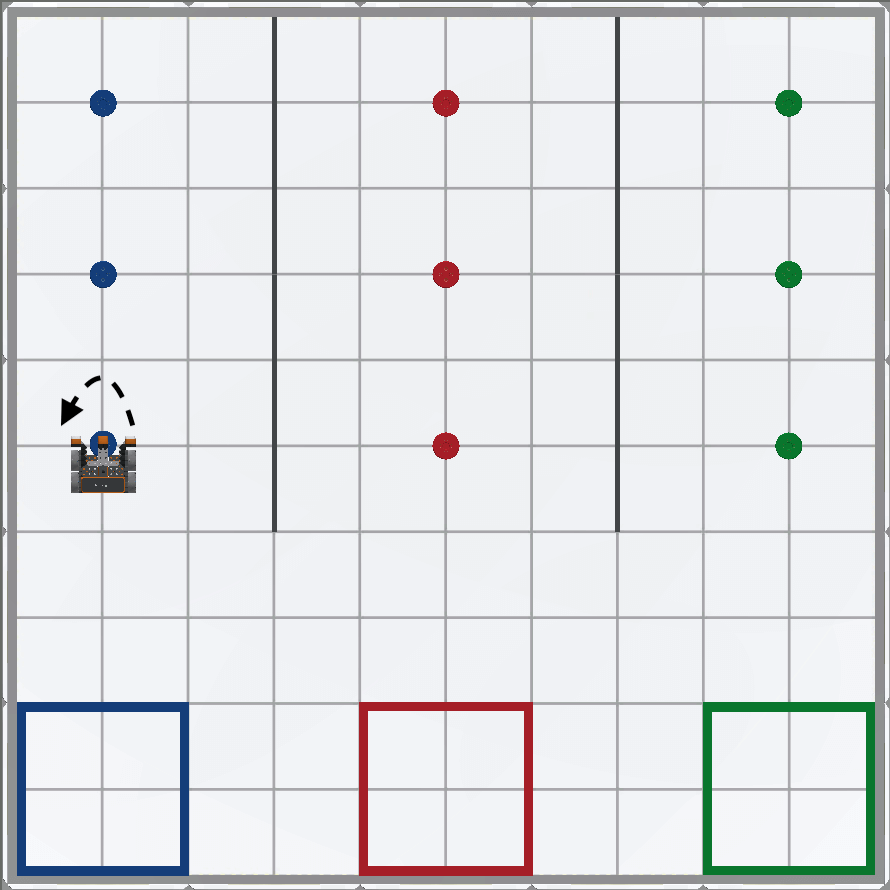
পাঠ ৩-এ, আপনি একটি প্রকল্প তৈরি করেছেন যাতে VR রোবট তিনটি নীল ডিস্ক তুলে Disk Mover Playgroundএর নীল গোলকটিতে ফেলে দেয়।
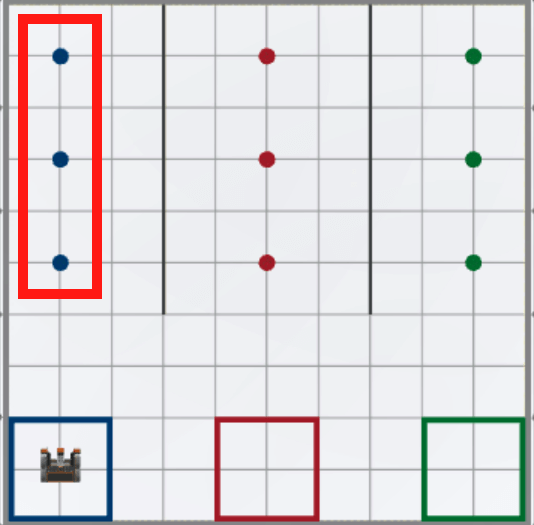
এই পাঠে, আপনি এখন ডিস্ক মুভার প্লেগ্রাউন্ড-এ প্রতিটি রঙের একটি ডিস্ক তুলে তার সংশ্লিষ্ট রঙিন লক্ষ্যে স্থানান্তর করার জন্য একটি প্রকল্প তৈরি করবেন!
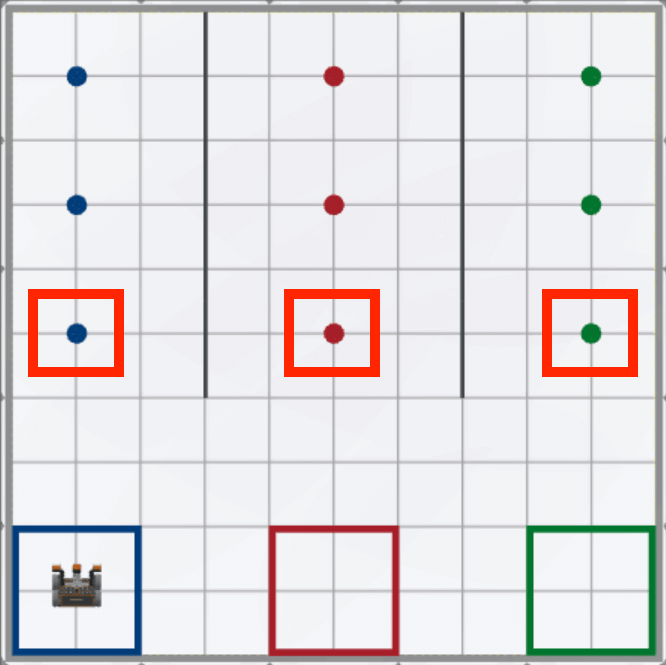
- ভিআর রোবটকে প্রতিটি রঙের জন্য একবার করে ডিস্কের দিকে গাড়ি চালানো, এটি তুলে নেওয়া, ঘুরে দাঁড়ানো এবং তারপর রঙিন লক্ষ্যে ফিরে যাওয়ার আচরণগুলি পুনরাবৃত্তি করতে হবে। ভিআর রোবট যাতে প্রতিটি রঙের একটি ডিস্ক তুলে ফেলা এবং ফেলে দেওয়ার ক্রিয়া পুনরাবৃত্তি করতে পারে, তার জন্য ভিআর রোবটকে নিম্নলিখিত আচরণগুলি তিনবার করতে হবে:
-
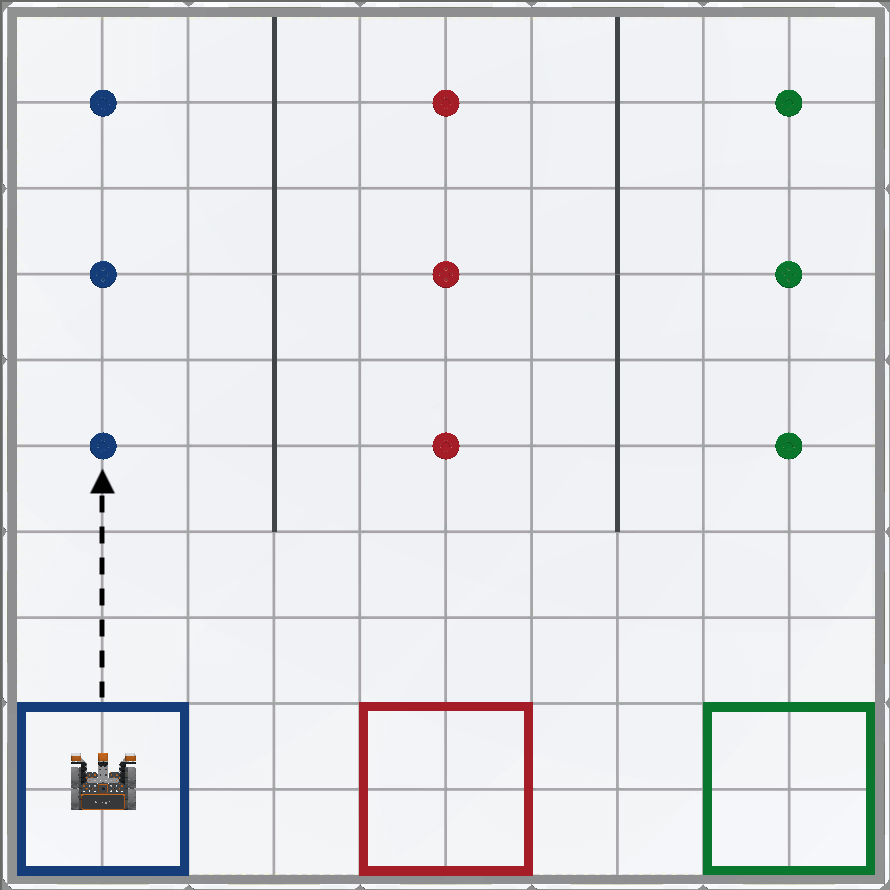
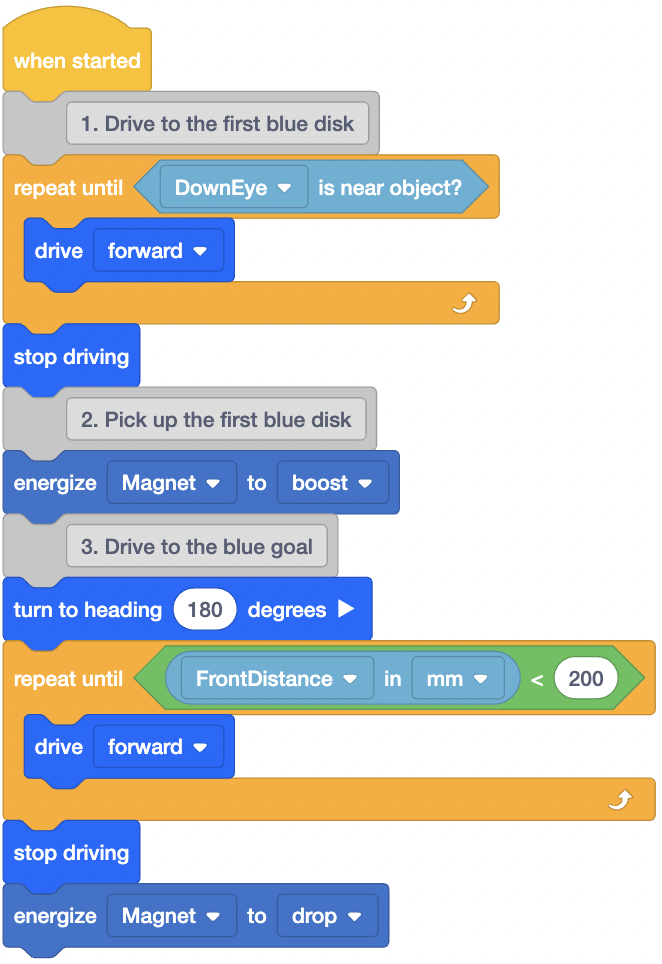
প্রথমে, ডাউন আই সেন্সর ব্যবহার করে প্রথম নীল ডিস্কের দিকে এগিয়ে যান।
-
তারপর, প্রথম নীল ডিস্ক কুড়ান.
-
এর পরে, ঘুরে দাঁড়ান।
-
তারপরে, দূরত্ব সেন্সর ব্যবহার করে লক্ষ্যে ফিরে যান এবং ডিস্কটি ফেলে দিন।

-
-
VEXcode VR-এ একটি নতুন প্রকল্প শুরু করুন এবং প্রকল্পটির নাম দিন Unit8Lesson4।

-
নিম্নলিখিত কোডটি তৈরি করুন যা VR রোবটকে উপরে তালিকাভুক্ত চারটি আচরণ সম্পূর্ণ করার নির্দেশ দেয়।
- ডিস্ক মুভার প্লেগ্রাউন্ড খুলুন এবং প্রকল্পটি চালান।
-
যখন এই প্রকল্পটি চালানো হবে, তখন VR রোবট গাড়ি চালাবে এবং প্রথম নীল ডিস্কটি তুলে নেবে, ঘুরবে, নীল লক্ষ্যে ড্রাইভ করবে এবং ডিস্কটি ফেলে দেবে।

-
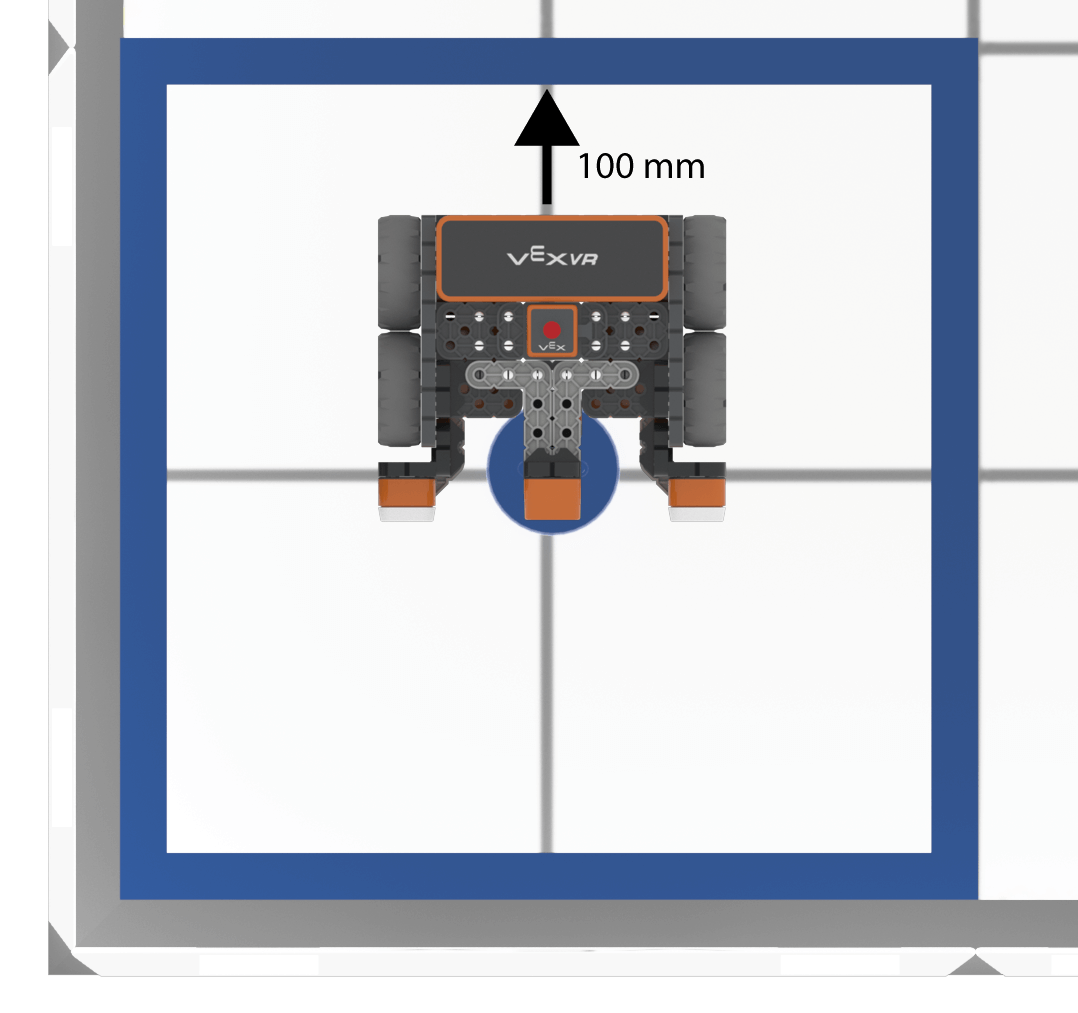
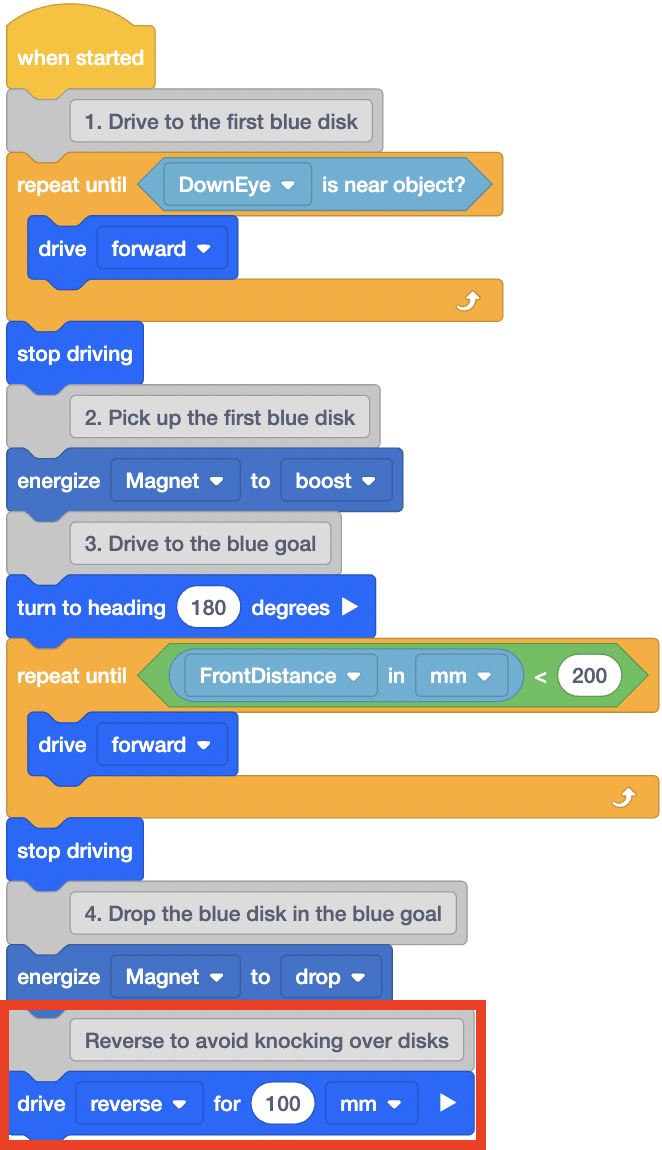
পরবর্তী রঙিন ডিস্ক সংগ্রহ করার জন্য, VR রোবটকে পরবর্তী রঙিন লক্ষ্যের দিকে ড্রাইভ করতে হবে। যাইহোক, নীল ডিস্কের সাথে সংঘর্ষ প্রতিরোধ করার জন্য, VR রোবটকে এখন ডিস্কের পথ থেকে সরে যেতে হবে। এটি করার জন্য, VR রোবটকে 100 মিলিমিটার (মিমি), বা খেলার মাঠে একটি গ্রিড স্কোয়ারের দৈর্ঘ্যের অর্ধেক বিপরীত করতে হবে।
-
কোডে একটি [এর জন্য ড্রাইভ] ব্লক যোগ করুন এবং 100 মিলিমিটার (মিমি) এর জন্য প্যারামিটারটিকে "বিপরীত" এ সেট করুন।
-
VR রোবটটিকে এখন পরবর্তী রঙিন লক্ষ্যের মুখোমুখি হতে বাম দিকে ঘুরতে হবে।

-
কোডটিতে একটি [শিরোনামের দিকে ঘুরুন] ব্লক যোগ করুন এবং ভিআর রোবটকে পরবর্তী লক্ষ্যের মুখোমুখি করার জন্য প্যারামিটারটি 90 ডিগ্রিতে সেট করুন।

এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।