
Leçon 4 : Déplacer un disque bleu
Déplacer un disque de chaque couleur
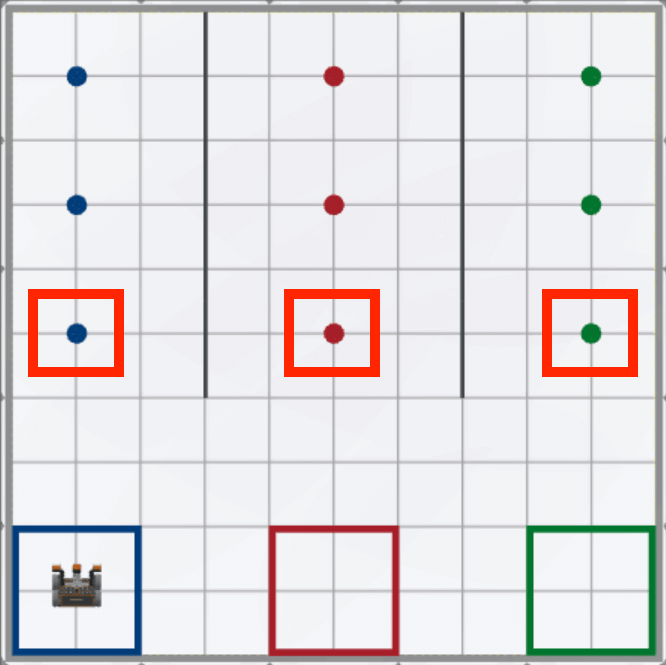
Dans la leçon 3, vous avez créé un projet pour que le robot VR ramasse et dépose chacun des trois disques bleus dans l'objectif bleu sur le terrain de jeu Disk Mover.

Dans cette leçon, vous allez maintenant créer un projet pour ramasser et déplacer un disque de chaque couleur dans son objectif coloré correspondant dans le terrain de jeu Disk Mover!
- Le robot VR devra répéter les comportements de conduite vers le disque, de ramassage, de retournement, puis de retour vers l'objectif coloré une fois pour chaque couleur. Pour que le robot VR répète les actions de ramassage et de dépôt d'un disque de chaque couleur, le robot VR devra effectuer les comportements suivants trois fois :
-
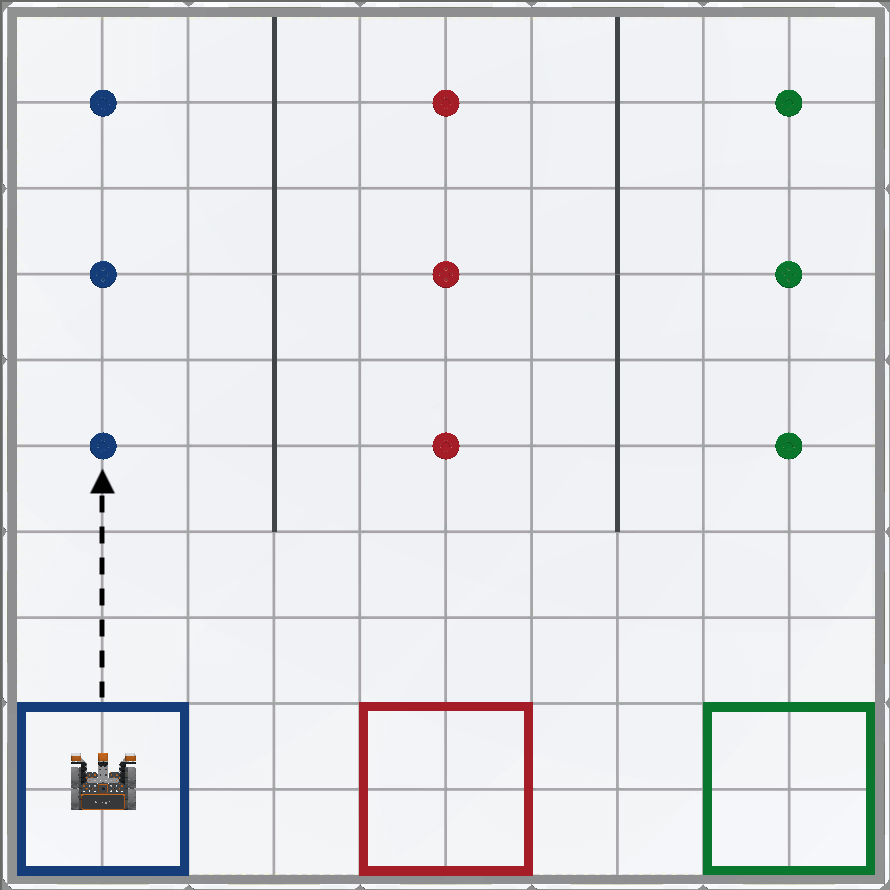
Tout d'abord, dirigez-vous vers le premier disque bleu à l'aide du capteur Down Eye.
-
Ensuite, prenez le premier disque bleu.
-
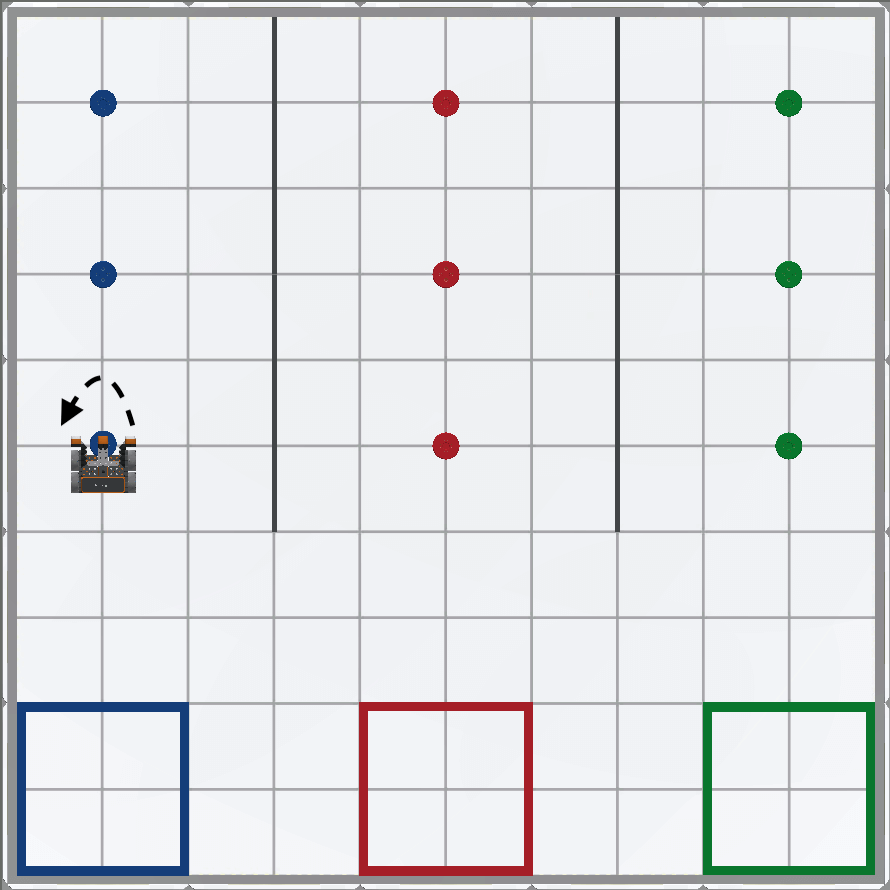
Ensuite, faites demi-tour.
-
Ensuite, revenez à l'objectif à l'aide du capteur de distance et déposez le disque.

-
-
Lancez un nouveau projet dans VEXcode VR et nommez le projet Unit8Lesson4.

-
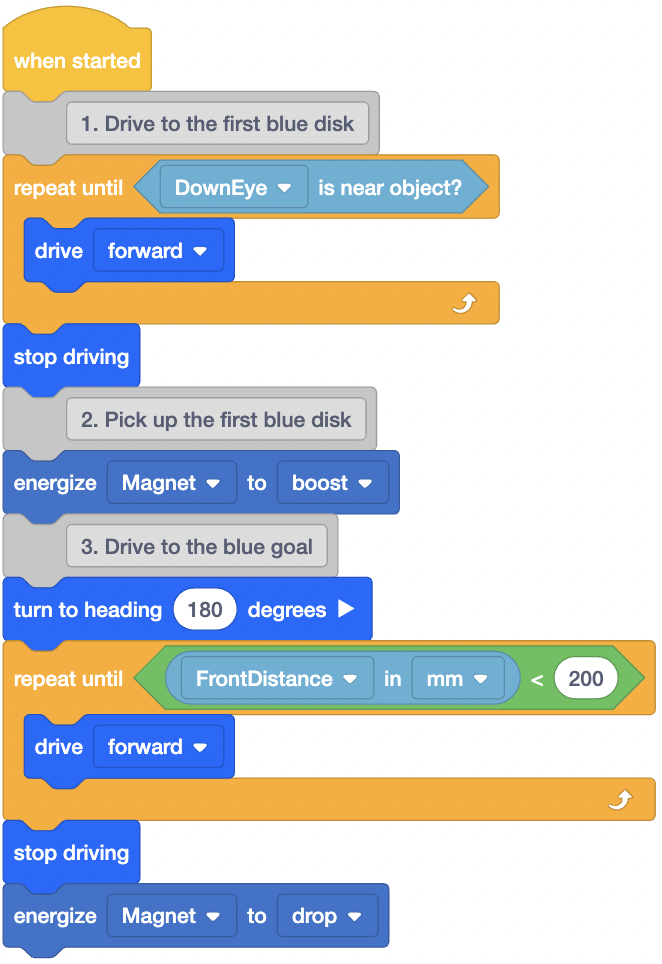
Créez le code suivant qui indique au robot VR de suivre les quatre comportements énumérés ci-dessus.
- Ouvrez le Disk Mover Playground et exécutez le projet.
-
Lorsque ce projet est exécuté, le robot VR va conduire et ramasser le premier disque bleu, faire demi-tour, conduire à l'objectif bleu et laisser tomber le disque.

-
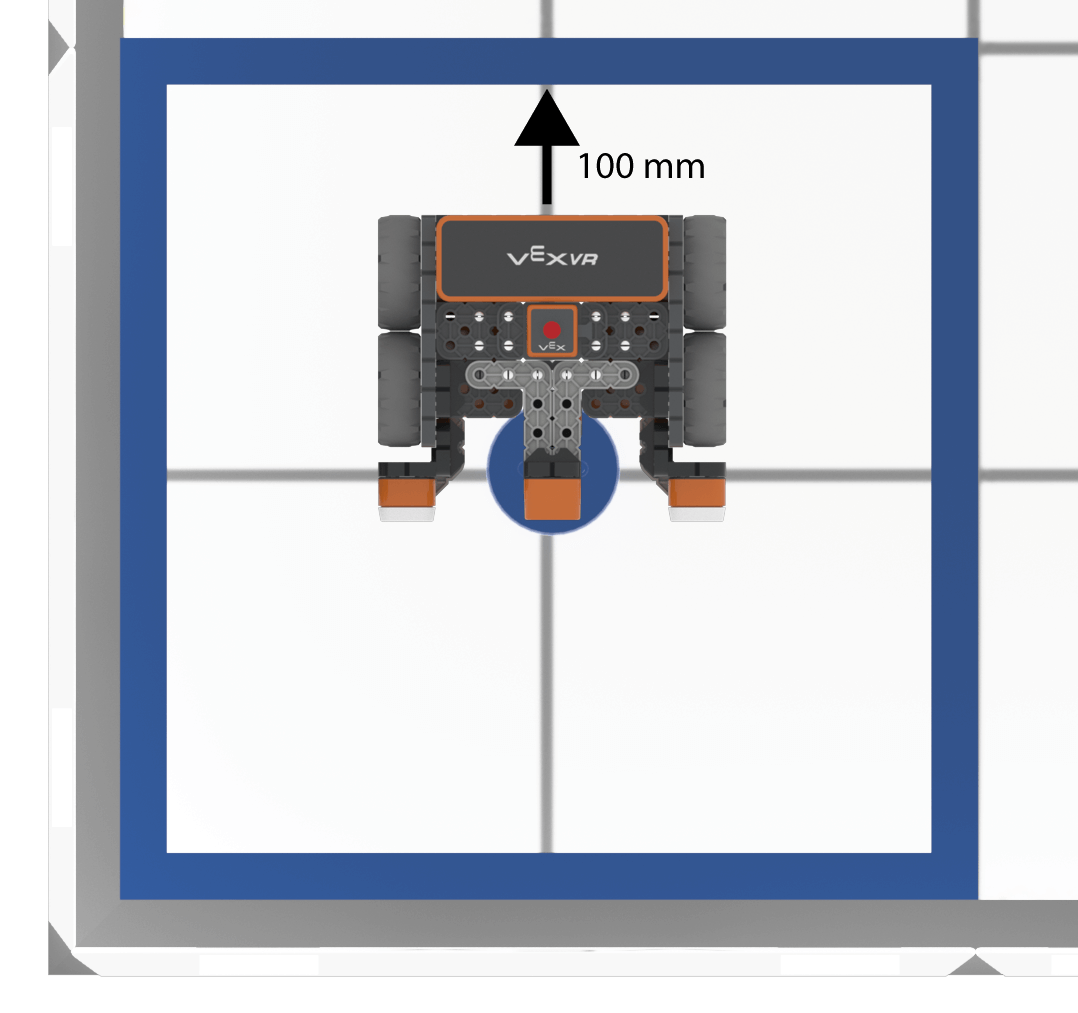
Afin de collecter le prochain disque coloré, le robot VR devra se diriger vers le prochain objectif coloré. Cependant, afin d'éviter une collision avec le disque bleu, le robot VR devra maintenant s'écarter du disque. Pour ce faire, le robot VR devra inverser 100 millimètres (mm), soit la moitié de la longueur d'un carré de grille sur le terrain de jeu.
-
Ajoutez un bloc [Drive for] au code et réglez le paramètre sur « reverse » pour 100 millimètres (mm).

-
Le robot VR devra maintenant tourner à gauche pour faire face au prochain objectif coloré.

-
Ajoutez un bloc [Turn to heading] au code et réglez le paramètre à 90 degrés pour que le robot VR fasse face au prochain objectif.

Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.