
Lección 4: Mueve un disco azul
Mover un disco de cada color
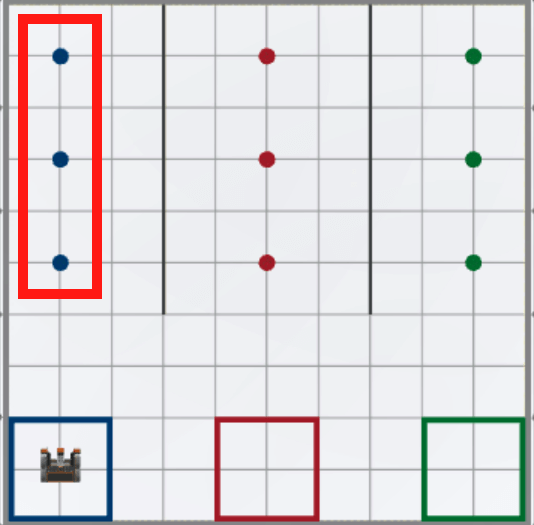
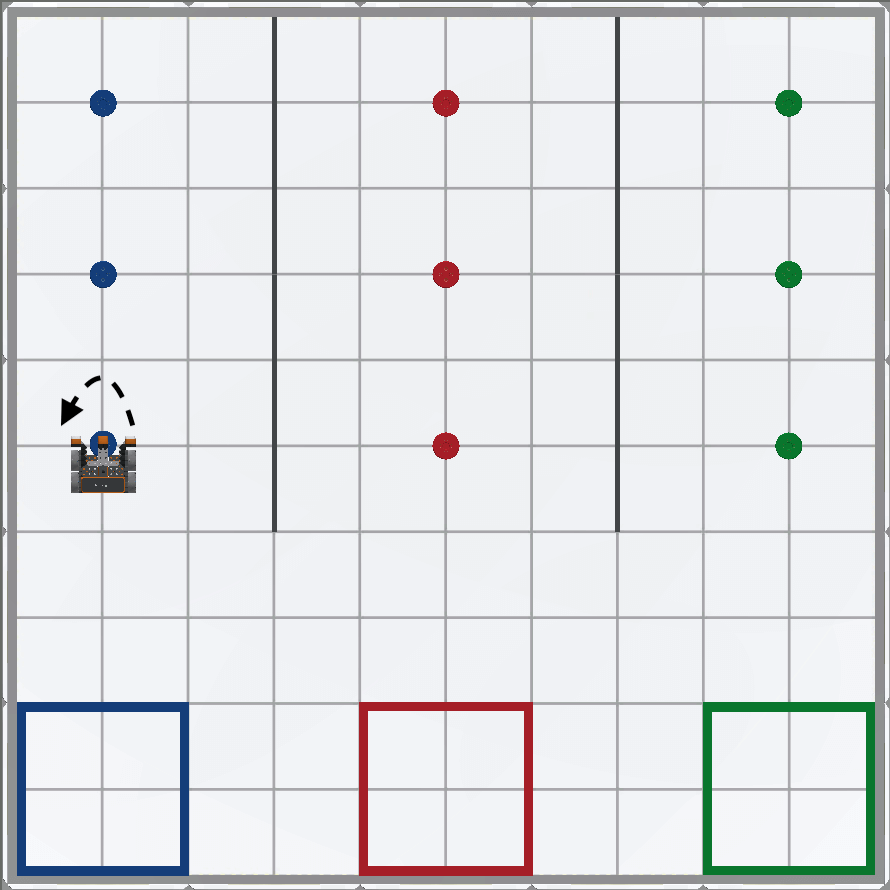
En la Lección 3, creaste un proyecto para que el Robot VR recogiera y soltara cada uno de los tres discos azules en la meta azul en el Disk Mover Playground.
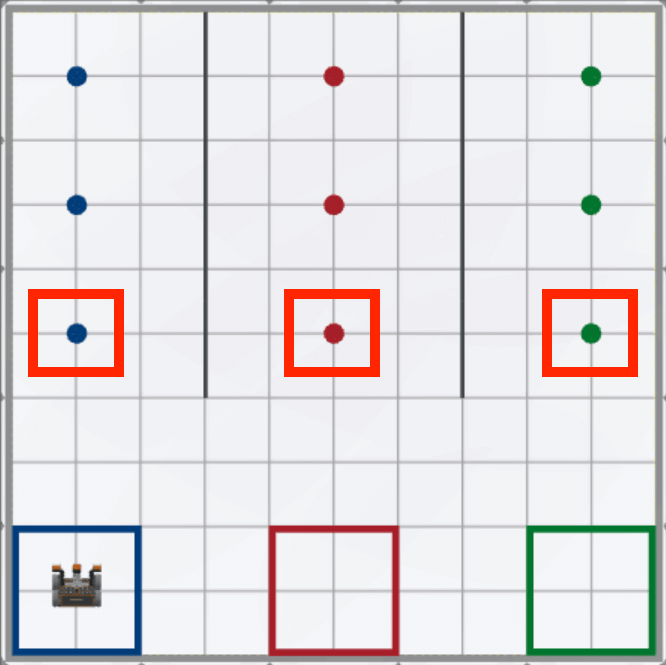
¡En esta Lección, ahora crearás un proyecto para recoger y mover un disco de cada color a su objetivo de color correspondiente en el Disk Mover Playground!
- El robot de realidad virtual deberá repetir los comportamientos de conducir al disco, levantarlo, darse la vuelta y luego conducir de regreso a la meta de color una vez para cada color. Para que el robot de realidad virtual repita las acciones de levantar y soltar un disco de cada color, el robot de realidad virtual deberá realizar los siguientes comportamientos tres veces:
-
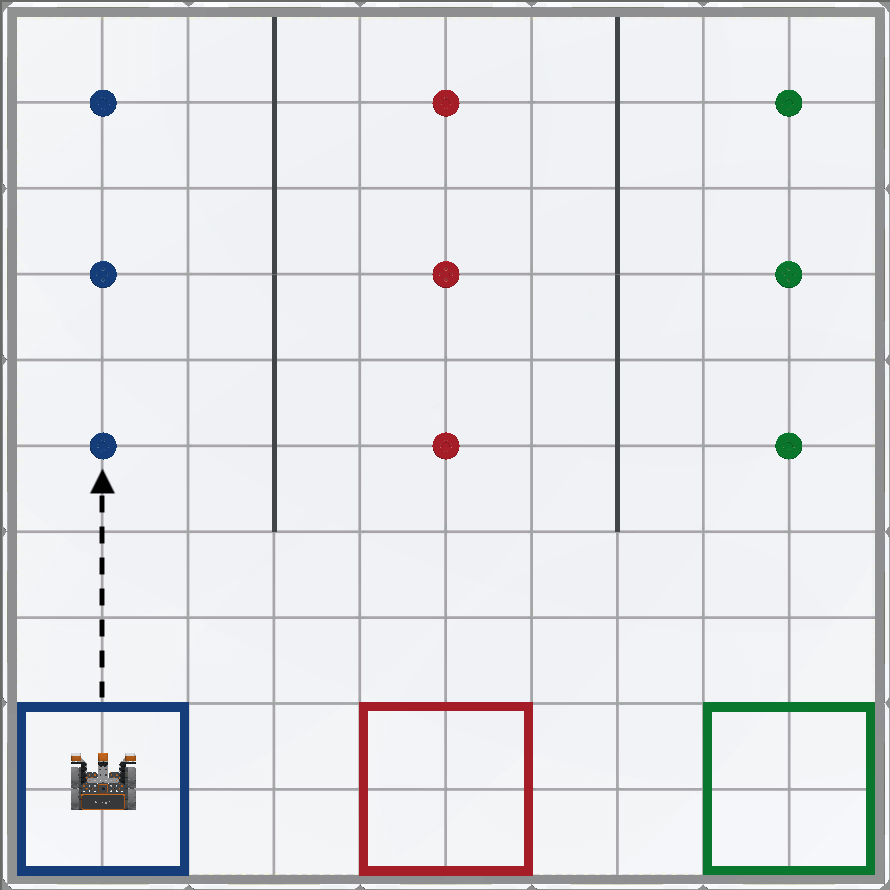
En primer lugar, avance hasta el primer disco azul utilizando el sensor Down Eye.
-
Luego, recoge el primer disco azul.
-
A continuación, date la vuelta.
-
A continuación, vuelva a la meta utilizando el sensor de distancia y suelte el disco.

-
-
Inicie un nuevo proyecto en VEXcode VR y nombre el proyecto Unit8Lesson4.

-
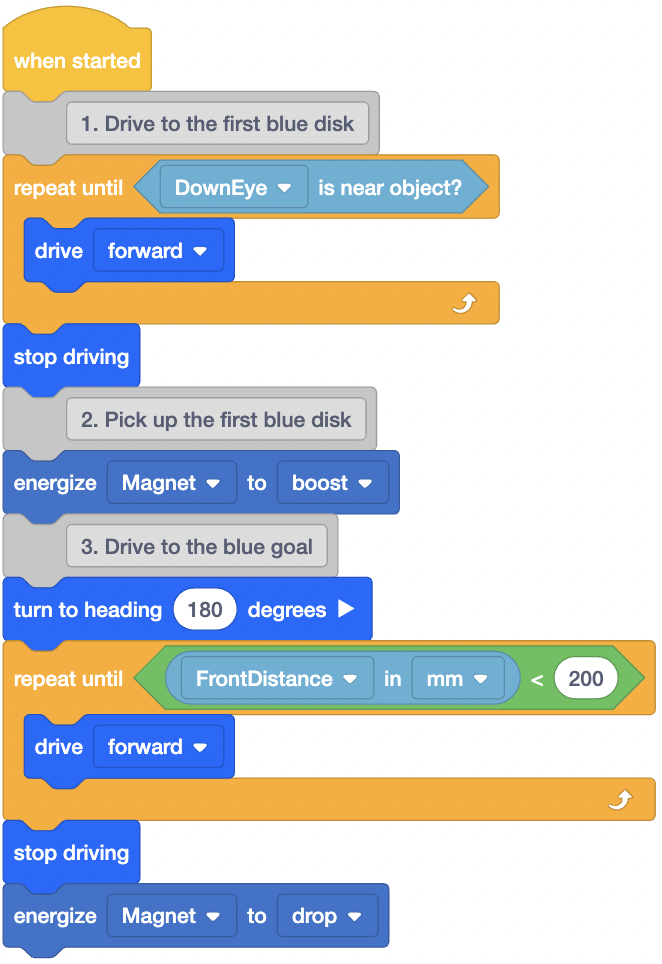
Construya el siguiente código que indique al robot de realidad virtual que complete los cuatro comportamientos enumerados anteriormente.
- Abra Disk Mover Playground y ejecute el proyecto.
-
Cuando se ejecute este proyecto, el robot VR conducirá y recogerá el primer disco azul, dará la vuelta, conducirá hasta la meta azul y soltará el disco.

-
Con el fin de recoger el siguiente disco de color, el robot VR tendrá que conducir hacia la siguiente meta de color. Sin embargo, para evitar colisiones con el disco azul, el robot VR ahora tendrá que apartarse del disco. Para hacer esto, el robot VR deberá invertir 100 milímetros (mm), o la mitad de la longitud de un cuadrado de cuadrícula en el patio de recreo.

-
Añada un bloque [Drive for] al código y establezca el parámetro en "reversa" para 100 milímetros (mm).

-
El robot VR ahora tendrá que girar a la izquierda para enfrentarse a la siguiente meta de color.

-
Añade un bloque [Turn to heading] al código y configura el parámetro en 90 grados para que el robot VR se enfrente al siguiente objetivo.

Seleccione el botón Siguiente para continuar con el resto de esta lección.