
പാഠം 4: ഒരു നീല ഡിസ്ക് നീക്കുക
ഓരോ നിറത്തിന്റെയും ഒരു ഡിസ്ക് നീക്കുക
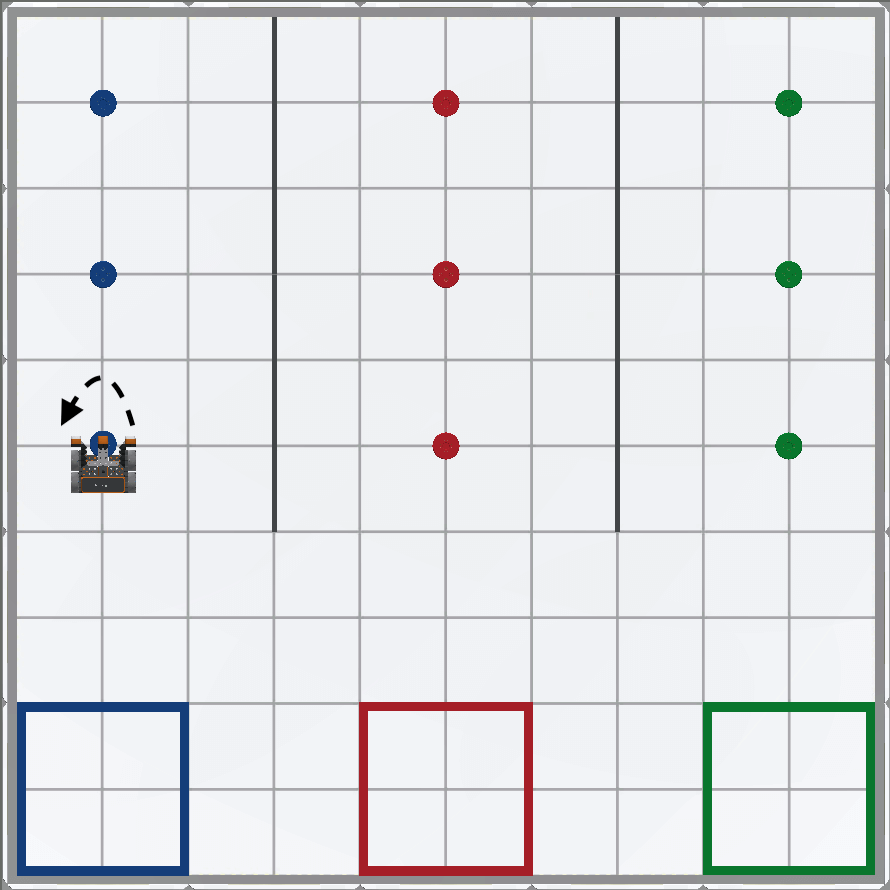
പാഠം 3-ൽ, ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്-ലെ നീല ഗോളിലേക്ക് മൂന്ന് നീല ഡിസ്കുകൾ ഓരോന്നും VR റോബോട്ട് എടുത്ത് ഇടുന്നതിനായി നിങ്ങൾ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിച്ചു.
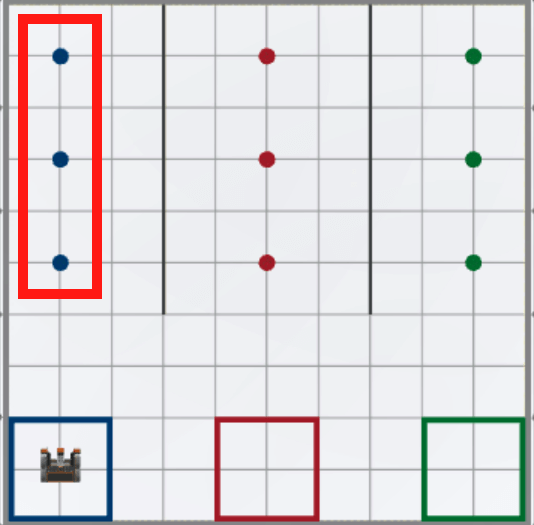
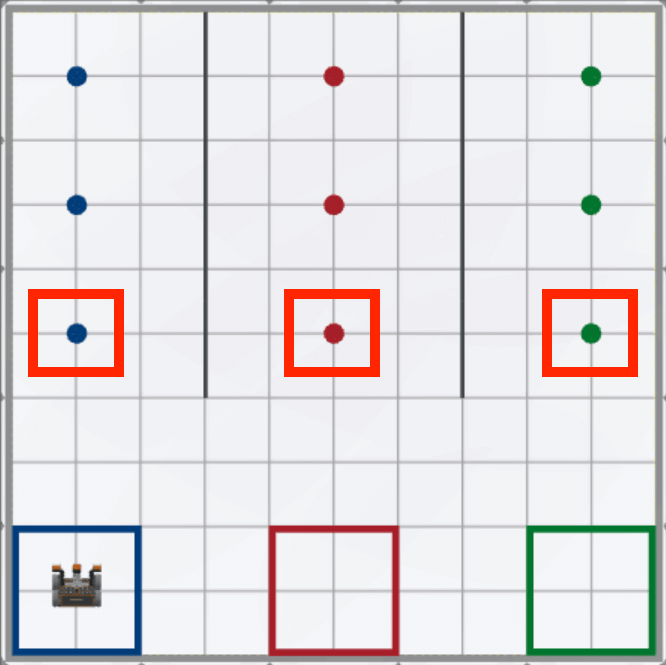
ഈ പാഠത്തിൽ, ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ലെ ഓരോ നിറത്തിന്റെയും ഒരു ഡിസ്ക് അതിന്റെ അനുബന്ധ നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് നീക്കുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് നിങ്ങൾ ഇപ്പോൾ സൃഷ്ടിക്കും!
- ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുക, അത് എടുക്കുക, തിരിയുക, തുടർന്ന് ഓരോ നിറത്തിനും ഒരു തവണ നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് തിരികെ ഡ്രൈവ് ചെയ്യുക തുടങ്ങിയ സ്വഭാവങ്ങൾ VR റോബോട്ട് ആവർത്തിക്കേണ്ടതുണ്ട്. ഓരോ നിറത്തിലുമുള്ള ഒരു ഡിസ്ക് എടുത്ത് താഴെയിടുന്ന പ്രവർത്തനങ്ങൾ VR റോബോട്ടിന് ആവർത്തിക്കുന്നതിന്, VR റോബോട്ട് ഇനിപ്പറയുന്ന പെരുമാറ്റങ്ങൾ മൂന്ന് തവണ ചെയ്യേണ്ടതുണ്ട്:
-
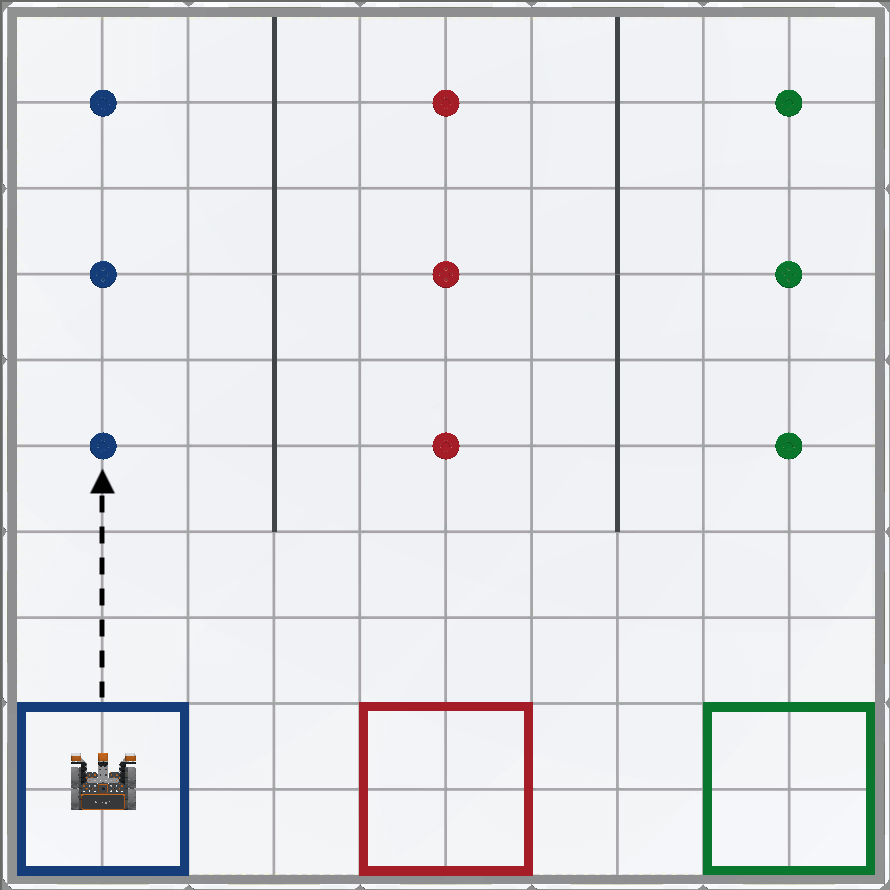
ആദ്യം, ഡൗൺ ഐ സെൻസർ ഉപയോഗിച്ച് ആദ്യത്തെ നീല ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുക.
-
പിന്നെ, ആദ്യത്തെ നീല ഡിസ്ക് എടുക്കുക.
-
അടുത്തതായി, തിരിയുക.
-
പിന്നെ, ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് ലക്ഷ്യത്തിലേക്ക് തിരികെ ഡ്രൈവ് ചെയ്ത് ഡിസ്ക് ഇടുക.

-
-
VEXcode VR-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് പ്രോജക്റ്റിന് എന്ന് പേരിടുക Unit8Lesson4.

-
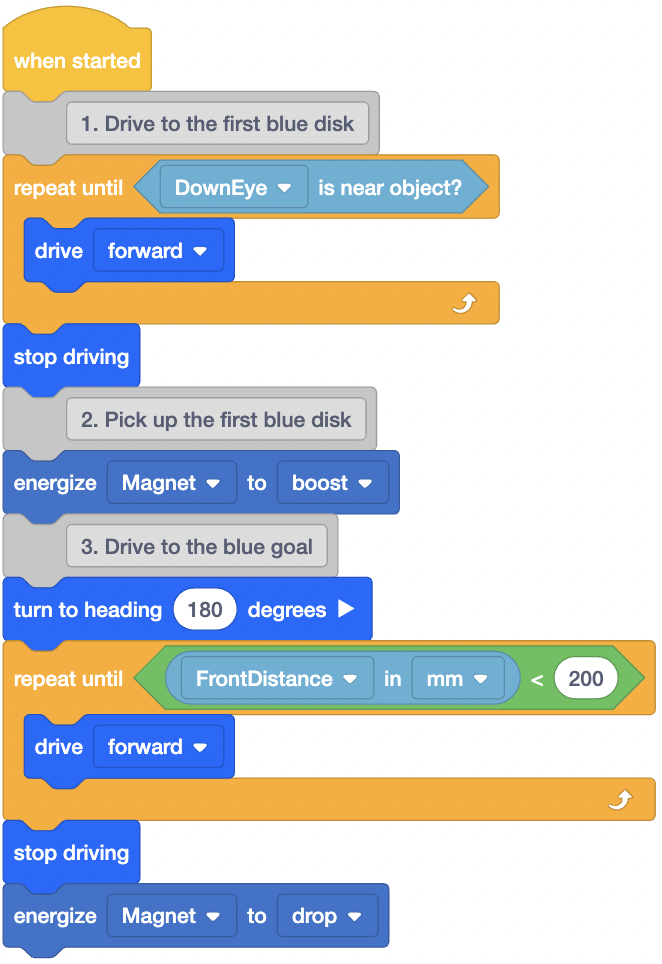
മുകളിൽ പറഞ്ഞിരിക്കുന്ന നാല് പെരുമാറ്റരീതികൾ പൂർത്തിയാക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്ന ഇനിപ്പറയുന്ന കോഡ് നിർമ്മിക്കുക.
- ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
ഈ പ്രോജക്റ്റ് റൺ ചെയ്തുകഴിഞ്ഞാൽ, വിആർ റോബോട്ട് ഡ്രൈവ് ചെയ്ത് ആദ്യത്തെ നീല ഡിസ്ക് എടുക്കും, തിരിഞ്ഞ്, നീല ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്ത് ഡിസ്ക് ഇടും.

-
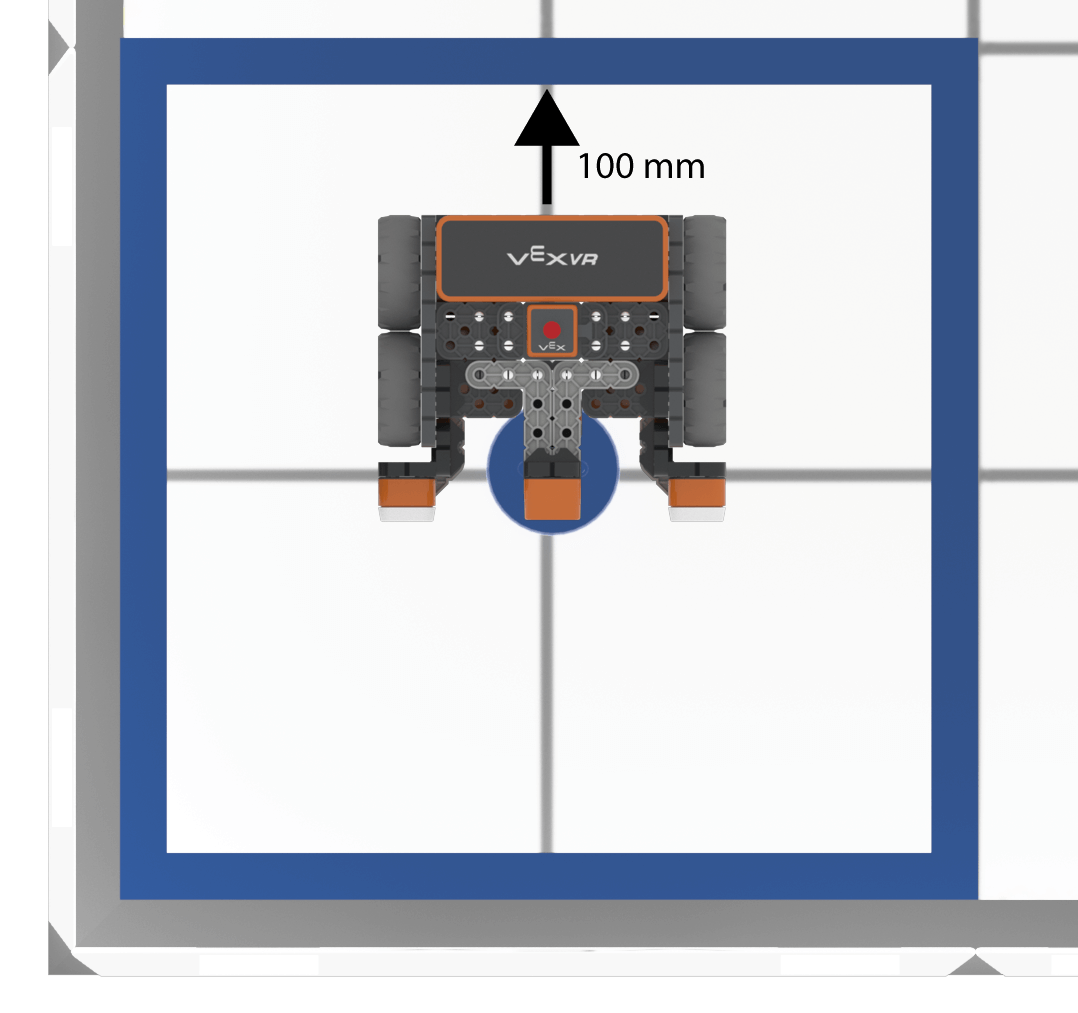
അടുത്ത നിറമുള്ള ഡിസ്ക് ശേഖരിക്കാൻ, വിആർ റോബോട്ട് അടുത്ത നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് പോകേണ്ടതുണ്ട്. എന്നിരുന്നാലും, നീല ഡിസ്കുമായി കൂട്ടിയിടിക്കുന്നത് തടയാൻ, വിആർ റോബോട്ട് ഇപ്പോൾ ഡിസ്കിന്റെ വഴിയിൽ നിന്ന് മാറേണ്ടതുണ്ട്. ഇത് ചെയ്യുന്നതിന്, വിആർ റോബോട്ട് പ്ലേഗ്രൗണ്ടിലെ ഒരു ഗ്രിഡ് സ്ക്വയറിന്റെ പകുതി നീളം അല്ലെങ്കിൽ 100 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) പിന്നിലേക്ക് മാറ്റേണ്ടതുണ്ട്.
-
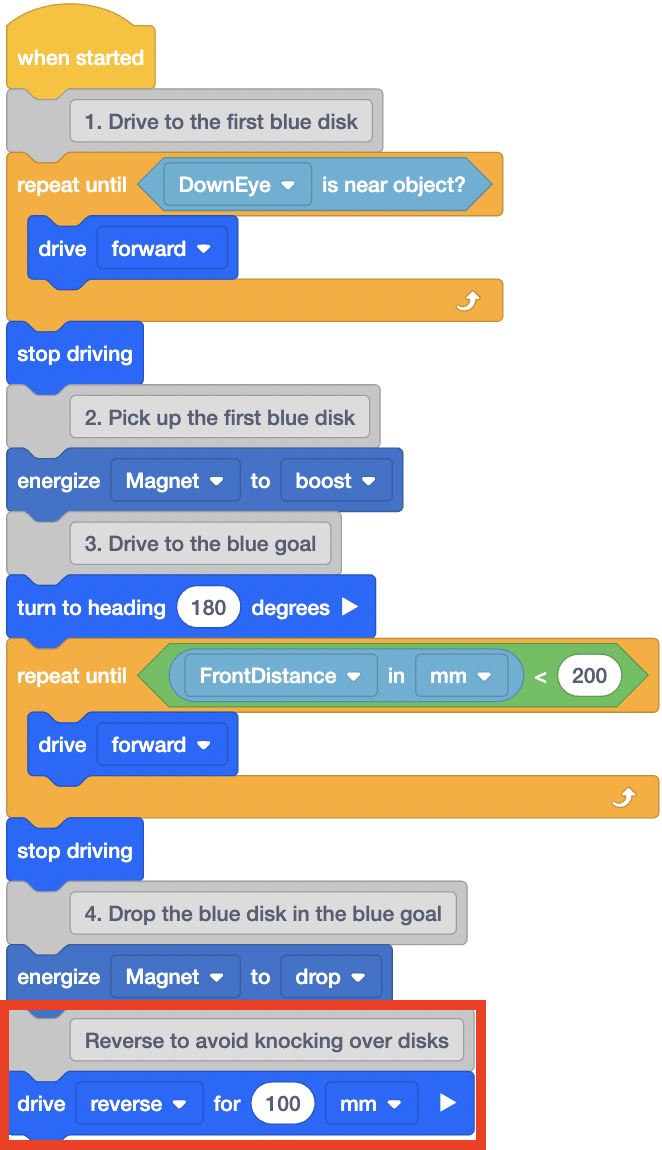
കോഡിലേക്ക് ഒരു [Drive for] ബ്ലോക്ക് ചേർത്ത് 100 മില്ലിമീറ്ററിന് (mm) പാരാമീറ്റർ “റിവേഴ്സ്” ആയി സജ്ജമാക്കുക.
-
അടുത്ത നിറമുള്ള ലക്ഷ്യത്തെ നേരിടാൻ വിആർ റോബോട്ട് ഇനി ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്.

-
VR റോബോട്ടിന് അടുത്ത ലക്ഷ്യത്തെ നേരിടുന്നതിന് കോഡിലേക്ക് ഒരു [തലക്കെട്ടിലേക്ക് തിരിയുക] ബ്ലോക്ക് ചേർത്ത് പാരാമീറ്റർ 90 ഡിഗ്രിയായി സജ്ജമാക്കുക.

ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.