
Lezione 4: Spostare un disco blu
Sposta un disco di ogni colore
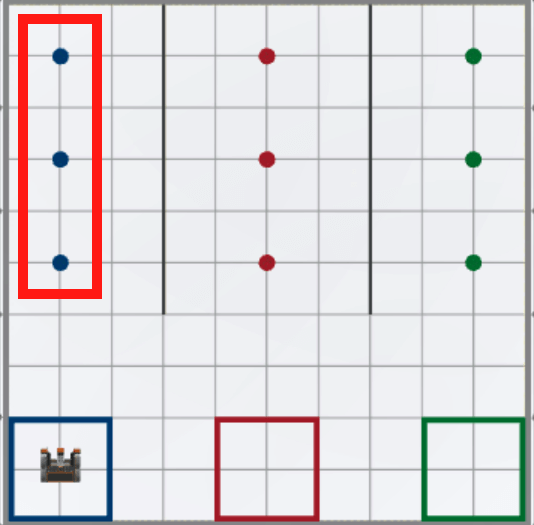
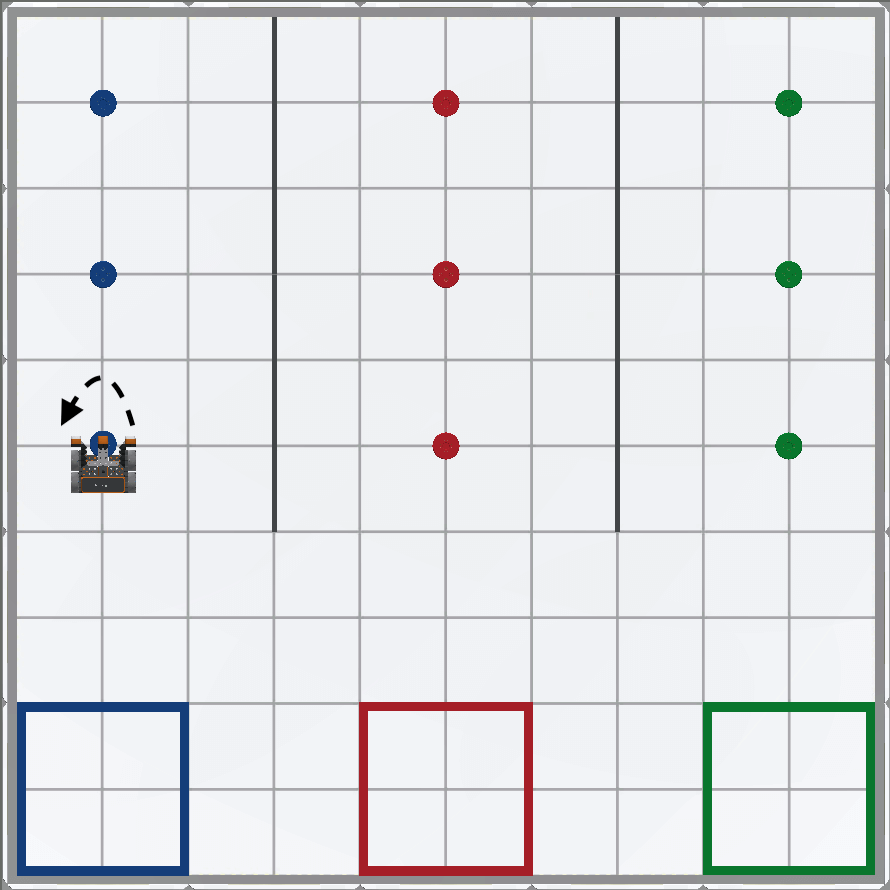
Nella lezione 3, hai creato un progetto per far sì che il robot VR raccolga e rilasci ciascuno dei tre dischi blu nell'obiettivo blu sul Disk Mover Playground.
In questa lezione, ora creerai un progetto per raccogliere e spostare un disco di ciascun colore nel suo obiettivo colorato corrispondente nel Disk Mover Playground!
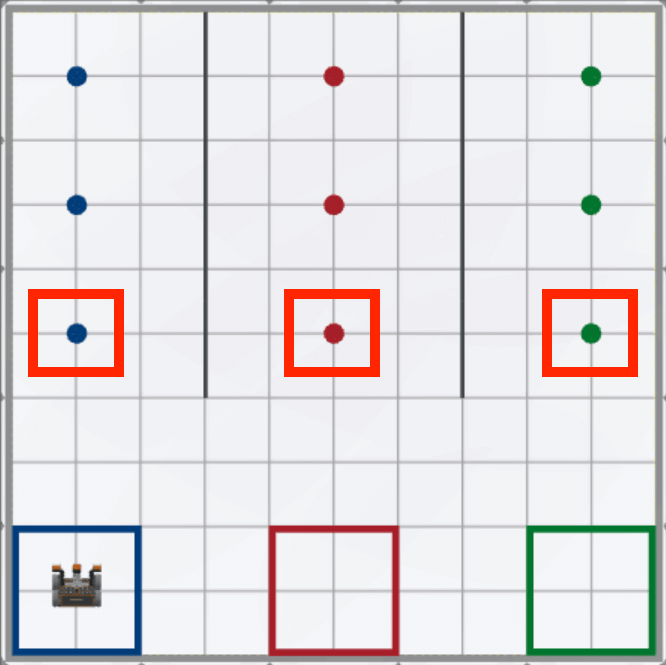
- Il robot VR dovrà ripetere i comportamenti di guida sul disco, raccoglierlo, girarsi e quindi tornare all'obiettivo colorato una volta per ogni colore. Affinché il Robot VR possa ripetere le azioni di prelievo e rilascio di un disco di ciascun colore, il Robot VR dovrà eseguire i seguenti comportamenti tre volte:
-
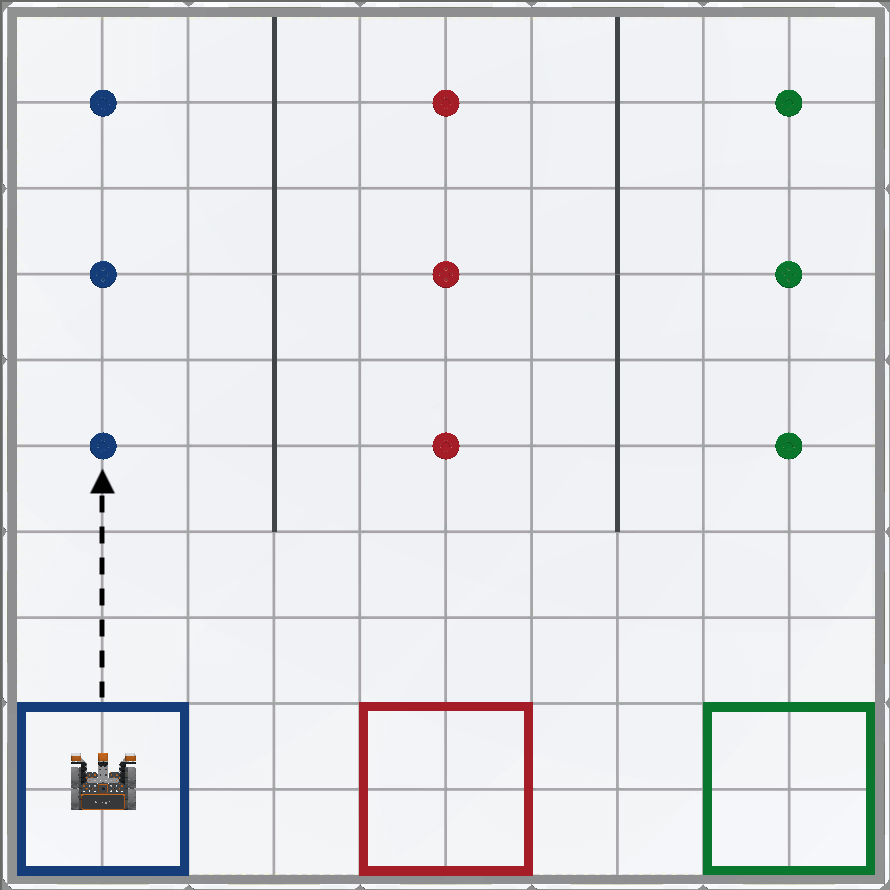
Per prima cosa, guidare in avanti fino al primo disco blu utilizzando il sensore Down Eye.
-
Quindi, prendi il primo disco blu.
-
Poi, girati.
-
Quindi, torna alla meta utilizzando il sensore di distanza e rilascia il disco.

-
-
Avviare un nuovo progetto in VEXcode VR e denominare il progetto Unit8Lesson4.

-
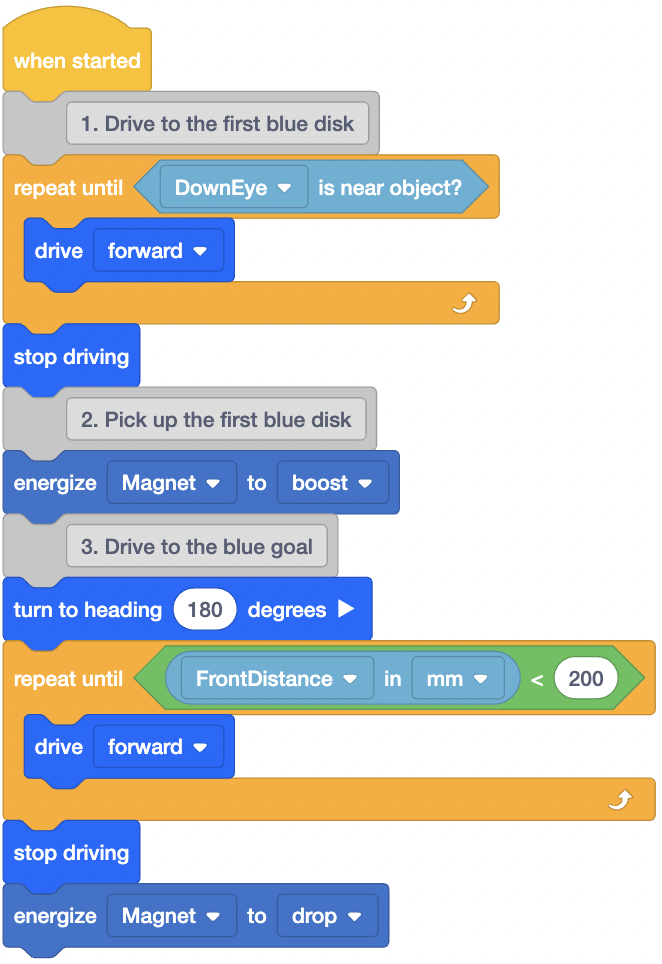
Costruisci il seguente codice che istruisce il robot VR a completare i quattro comportamenti sopra elencati.
- Aprire il Disk Mover Playground ed eseguire il progetto.
-
Quando questo progetto viene eseguito, il robot VR guiderà e raccoglierà il primo disco blu, si girerà, guiderà verso l'obiettivo blu e lascerà cadere il disco.

-
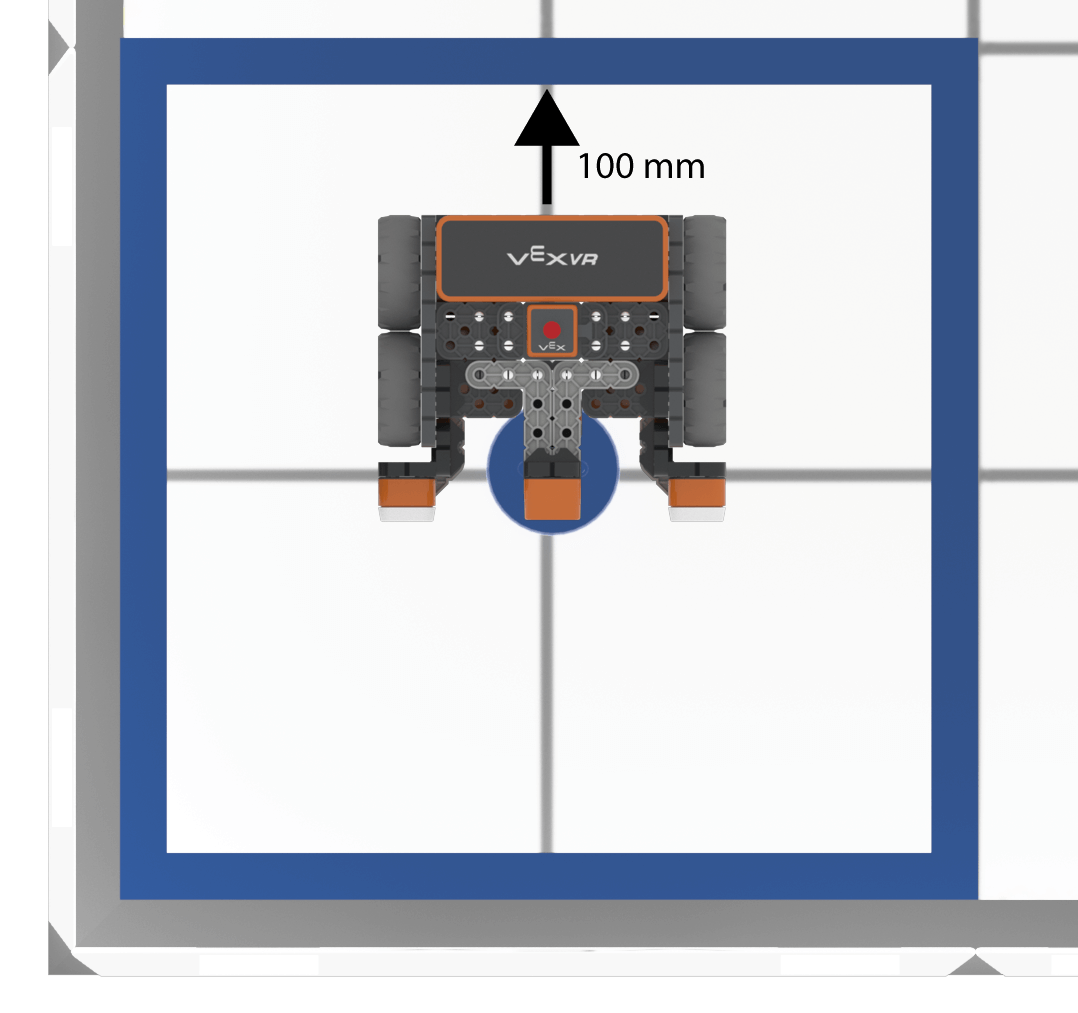
Per raccogliere il prossimo disco colorato, il robot VR dovrà guidare verso il prossimo obiettivo colorato. Tuttavia, al fine di evitare la collisione con il disco blu, il robot VR dovrà ora spostarsi dal disco. Per fare ciò, il robot VR dovrà invertire 100 millimetri (mm), o metà della lunghezza di un quadrato della griglia sul parco giochi.
-
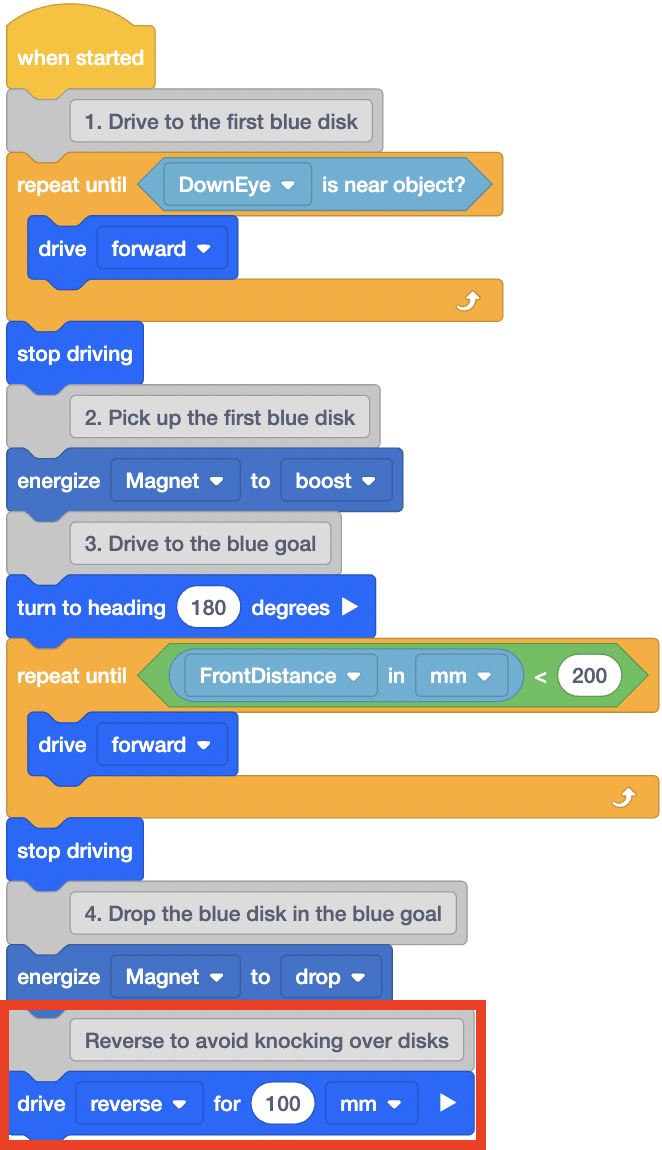
Aggiungere un blocco [Drive for] al codice e impostare il parametro su "reverse" per 100 millimetri (mm).
-
Il robot VR dovrà ora girare a sinistra per affrontare il prossimo obiettivo colorato.

-
Aggiungere un blocco [Turn to heading] al codice e impostare il parametro a 90 gradi in modo che il robot VR affronti l'obiettivo successivo.

Selezionare il pulsante Avanti per continuare con il resto della lezione.