
4과: 파란색 디스크 이동
각 색상의 디스크를 하나씩 옮기세요
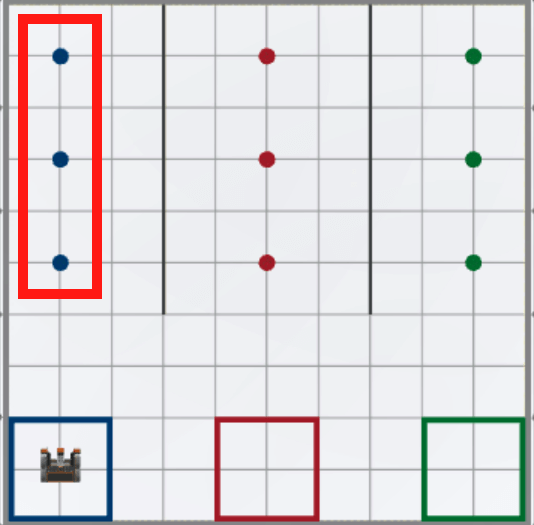
3과에서는 VR 로봇이 파란색 디스크 3개를 모두 집어 올려 Disk Mover Playground의 파란색 골대에 떨어뜨리는 프로젝트를 만들었습니다.
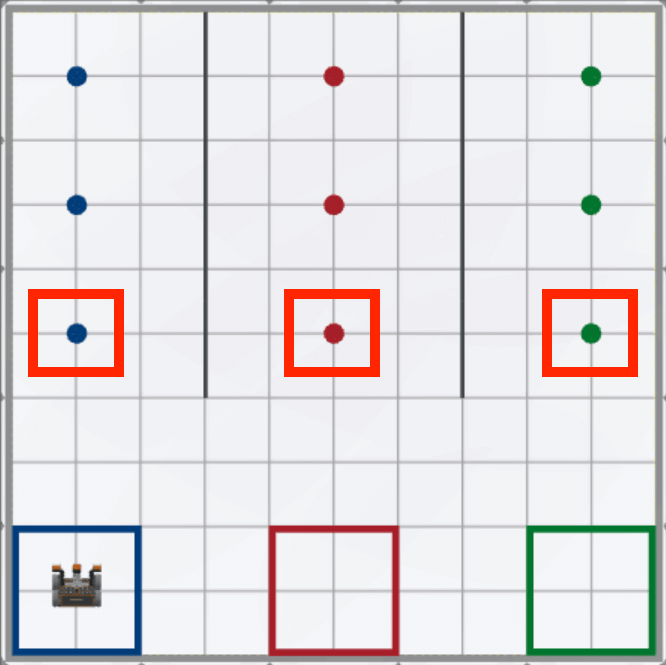
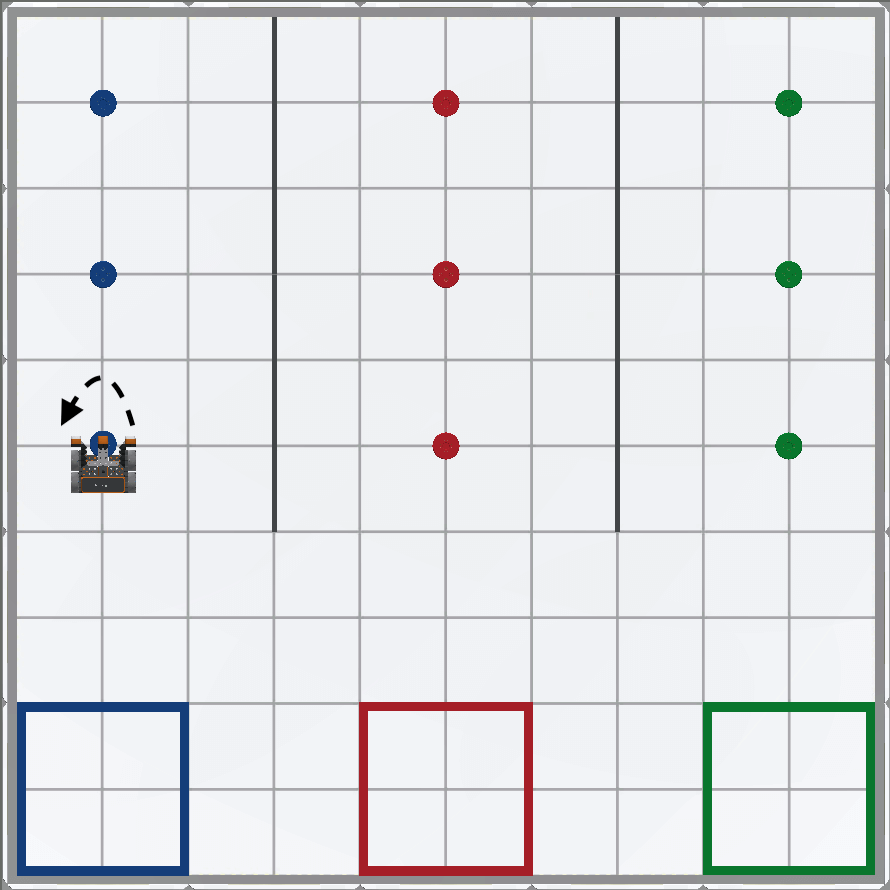
이번 수업에서는 각 색상의 디스크를 하나씩 집어 Disk Mover Playground에 있는 해당 색상의 골대로 옮기는 프로젝트를 만들어 보겠습니다!
- VR 로봇은 디스크까지 운전하고, 디스크를 집어 들고, 돌아서서 다시 색깔이 있는 목표로 돌아오는 동작을 각 색상마다 한 번씩 반복해야 합니다. VR 로봇이 각 색상의 디스크를 하나씩 집어 올리고 떨어뜨리는 동작을 반복하려면 VR 로봇은 다음 동작을 세 번 수행해야 합니다.
-
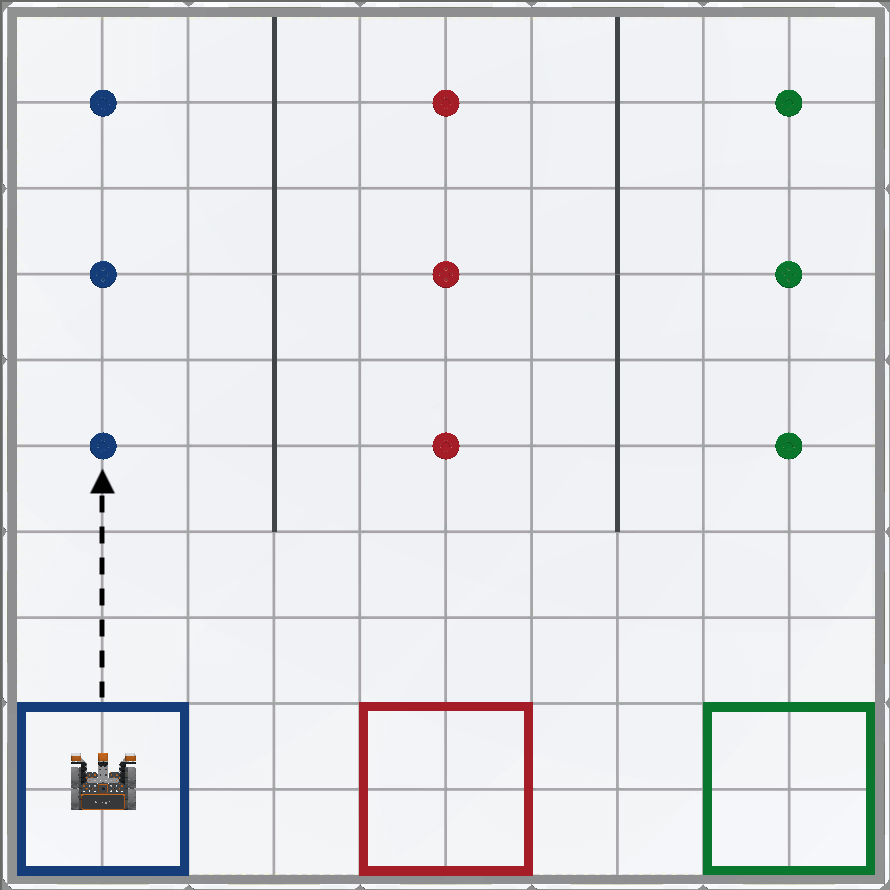
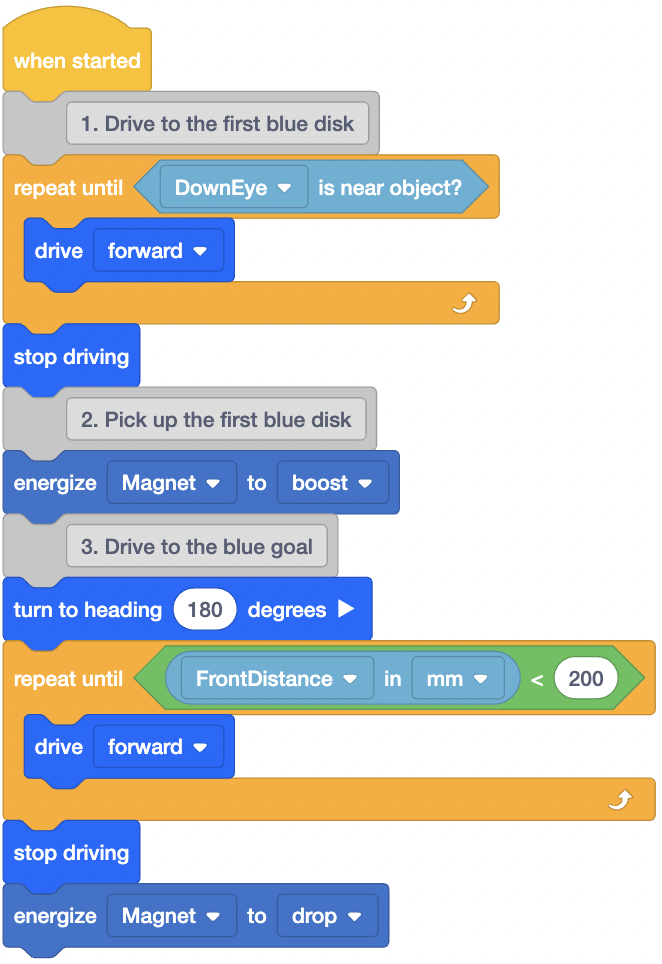
먼저, 다운 아이 센서를 사용하여 첫 번째 파란색 디스크까지 앞으로 주행하세요.
-
그러면 첫 번째 파란색 디스크를 집어 올리세요.
-
다음으로, 돌아서세요.
-
그런 다음 거리 센서를 사용하여 목표 지점으로 돌아가서 디스크를 떨어뜨립니다.

-
-
VEXcode VR에서 새 프로젝트를 시작하고 프로젝트 이름을 Unit8Lesson4로 지정합니다.

-
위에 나열된 네 가지 동작을 VR 로봇이 완료하도록 지시하는 다음 코드를 작성하세요.
- Disk Mover Playground 을 열고 프로젝트를 실행합니다.
-
이 프로젝트를 실행하면, VR 로봇이 주행하여 첫 번째 파란색 디스크를 집어 들고, 돌아서서 파란색 목표 지점으로 주행한 후 디스크를 떨어뜨립니다.

-
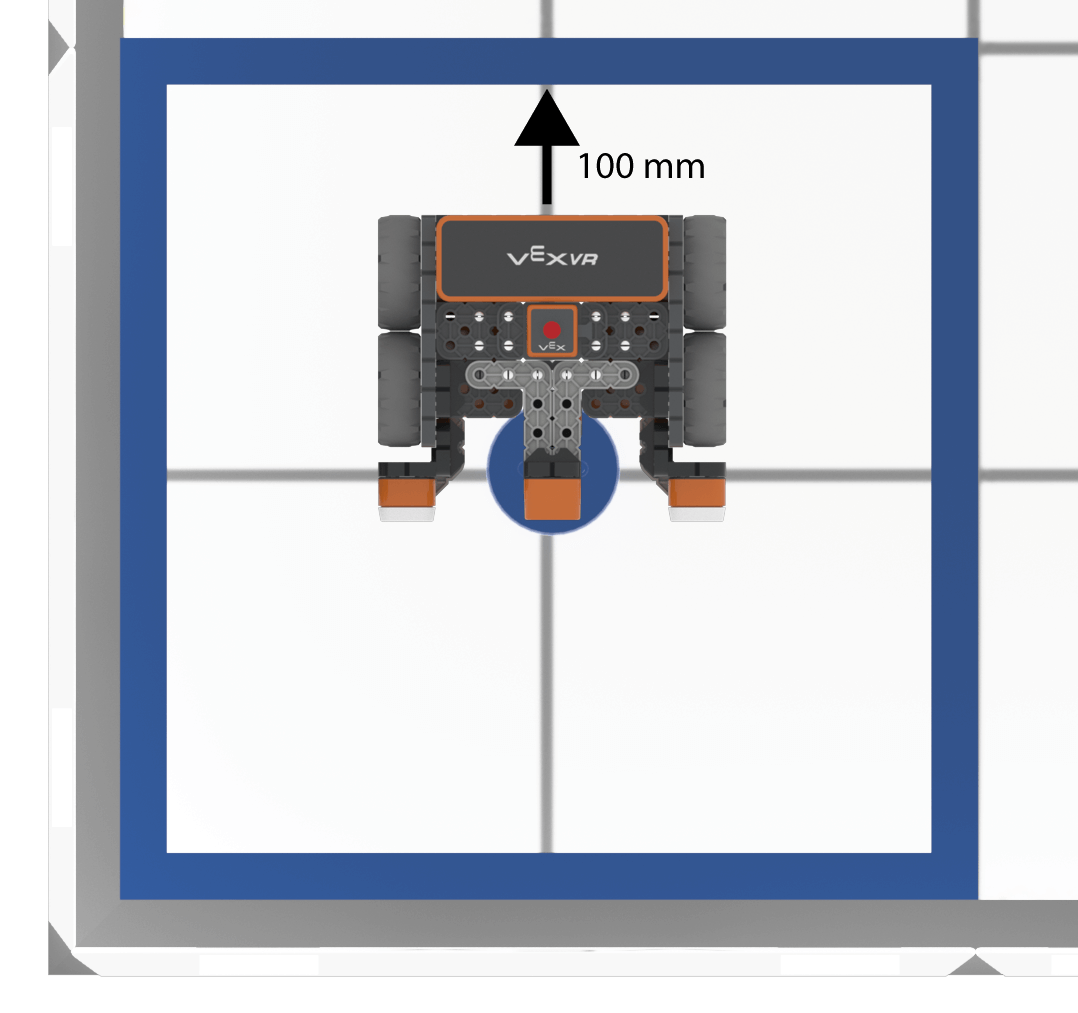
다음 색깔 디스크를 모으려면 VR 로봇이 다음 색깔 목표를 향해 달려가야 합니다. 하지만 파란색 디스크와의 충돌을 막기 위해, VR 로봇은 이제 디스크의 방해가 되지 않는 곳으로 이동해야 합니다. 이를 위해 VR 로봇은 놀이터의 격자 사각형 길이의 절반인 100밀리미터(mm)를 반전해야 합니다.
-
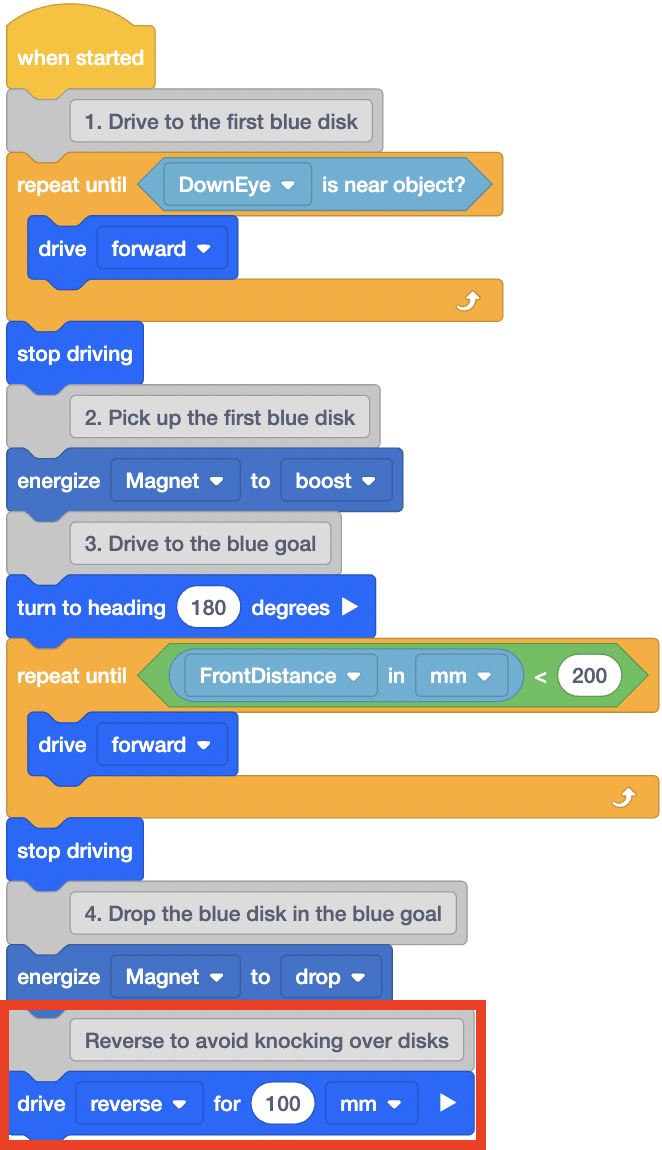
코드에 [Drive for] 블록을 추가하고 매개변수를 100밀리미터(mm)에 대해 "역방향"으로 설정합니다.
-
VR 로봇은 이제 다음 색깔의 목표를 향하기 위해 좌회전해야 합니다.

-
VR 로봇이 다음 목표를 향하도록 하려면 코드에 [방향 전환] 블록을 추가하고 매개변수를 90도로 설정하세요.

이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.