
บทเรียนที่ 4: ย้ายดิสก์สีฟ้า
ย้ายหนึ่งดิสก์ของแต่ละสี
ในบทเรียนที่ 3 คุณได้สร้างโครงการเพื่อให้หุ่นยนต์ VR รับและวางดิสก์สีน้ำเงินทั้งสามตัวลงในเป้าหมายสีน้ำเงินบน Disk MoverPlayground

ในบทเรียนนี้ตอนนี้คุณจะสร้างโครงการเพื่อหยิบและย้ายดิสก์หนึ่งแผ่นของแต่ละสีไปยังเป้าหมายสีที่สอดคล้องกันใน Disk Mover Playground!
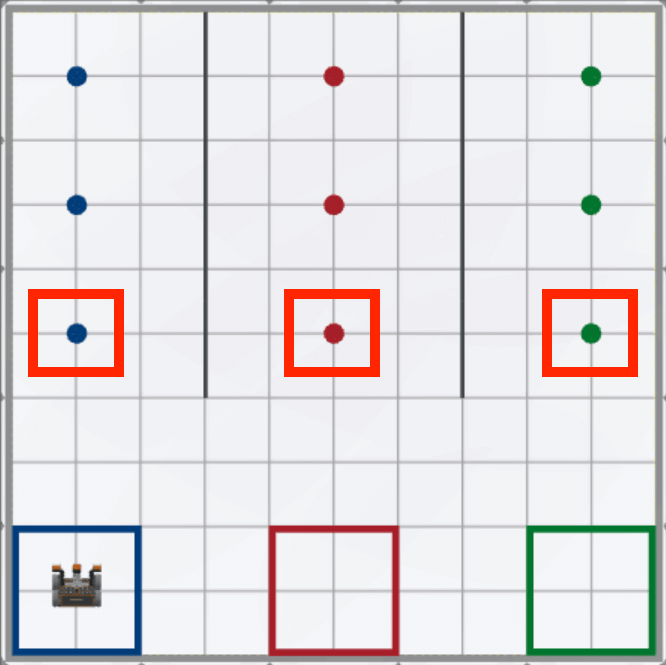
- หุ่นยนต์ VR จะต้องทำซ้ำพฤติกรรมของการขับรถไปยังดิสก์หยิบมันขึ้นมาหันหลังกลับแล้วขับรถกลับไปยังเป้าหมายที่มีสีหนึ่งครั้งสำหรับแต่ละสี เพื่อให้หุ่นยนต์ VR ทำซ้ำการกระทำของการหยิบและวางดิสก์หนึ่งแผ่นในแต่ละสีหุ่นยนต์ VR จะต้องทำพฤติกรรมต่อไปนี้สามครั้ง:
-
ขั้นแรกขับไปข้างหน้าไปยังดิสก์สีฟ้าอันแรกโดยใช้เซ็นเซอร์ดวงตาลง
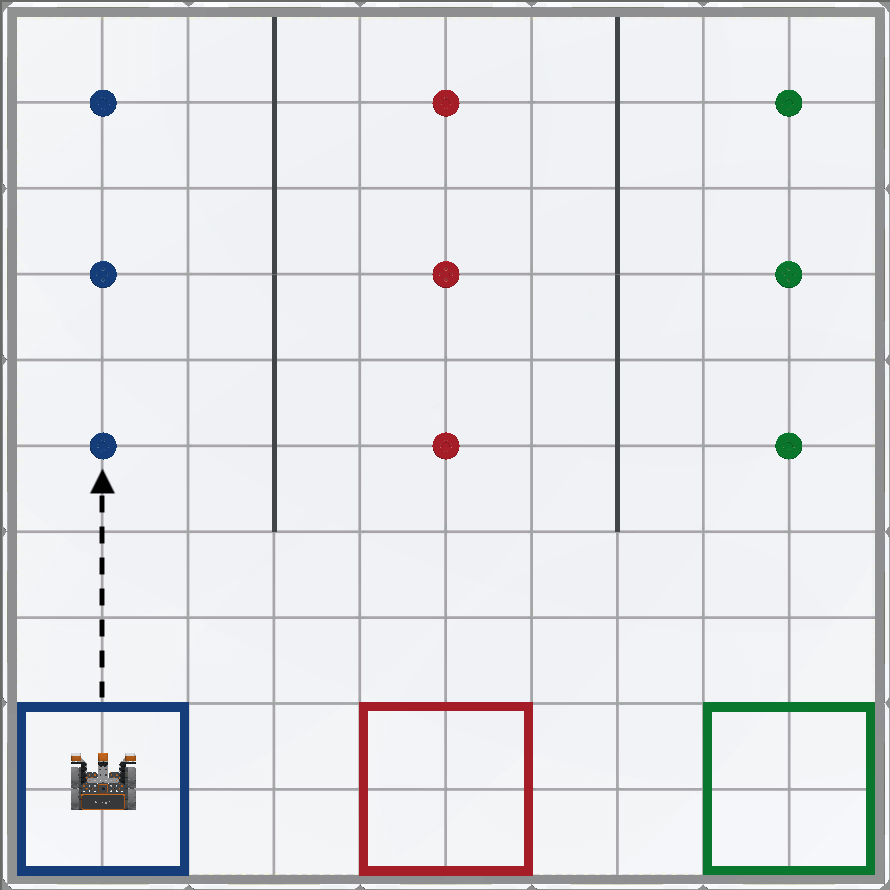
-
จากนั้นหยิบดิสก์สีน้ำเงินอันแรกขึ้นมา
-
ต่อไปหันหลังกลับ
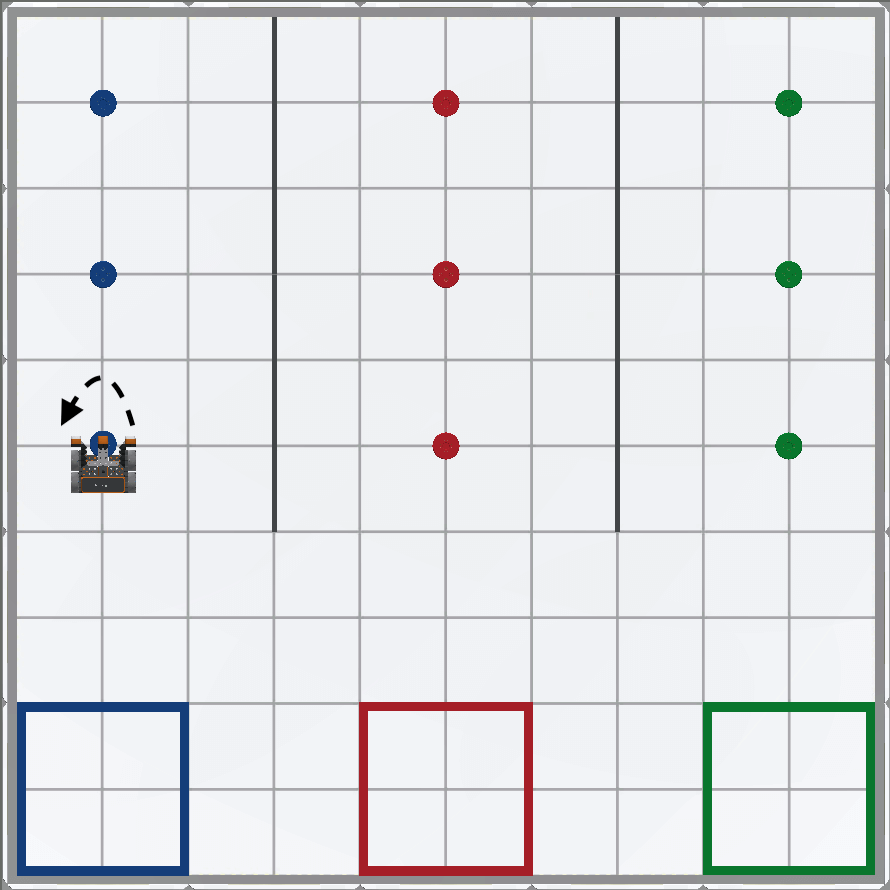
-
จากนั้นขับรถกลับไปที่เป้าหมายโดยใช้เซ็นเซอร์ระยะทางและวางดิสก์

-
-
เริ่มโครงการใหม่ใน VEXcode VR และตั้งชื่อ โครงการUnit8Lesson4

-
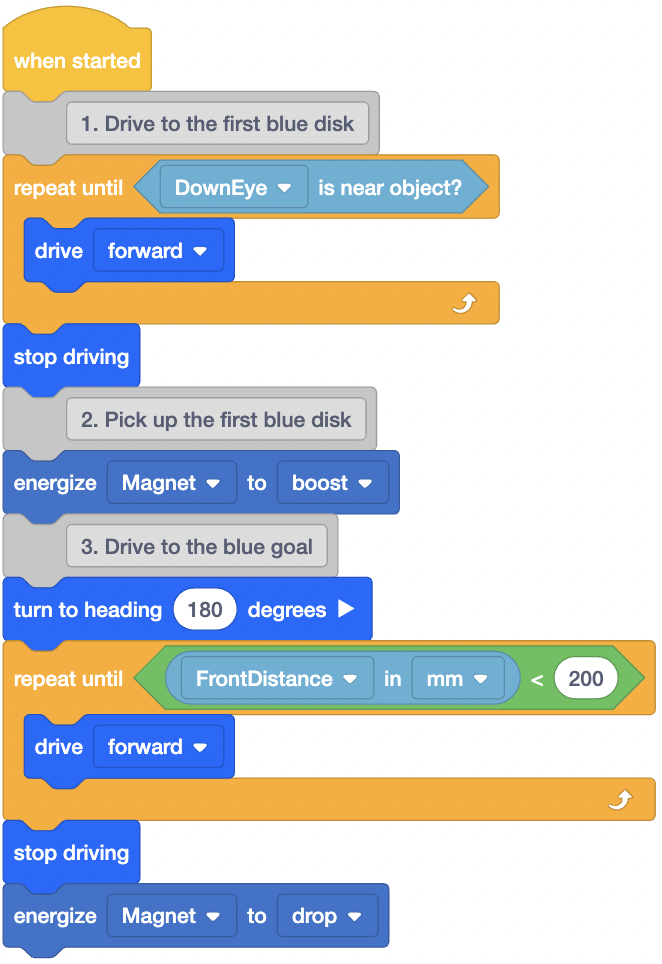
สร้างโค้ดต่อไปนี้ที่สั่งให้หุ่นยนต์ VR ทำสี่พฤติกรรมที่ระบุไว้ข้างต้นให้เสร็จสมบูรณ์
- เปิด Disk Mover Playground และเรียกใช้โครงการ
-
เมื่อโครงการนี้ทำงานหุ่นยนต์ VR จะขับเคลื่อนและหยิบดิสก์สีน้ำเงินตัวแรกหมุนกลับขับไปที่เป้าหมายสีน้ำเงินและวางดิสก์

-
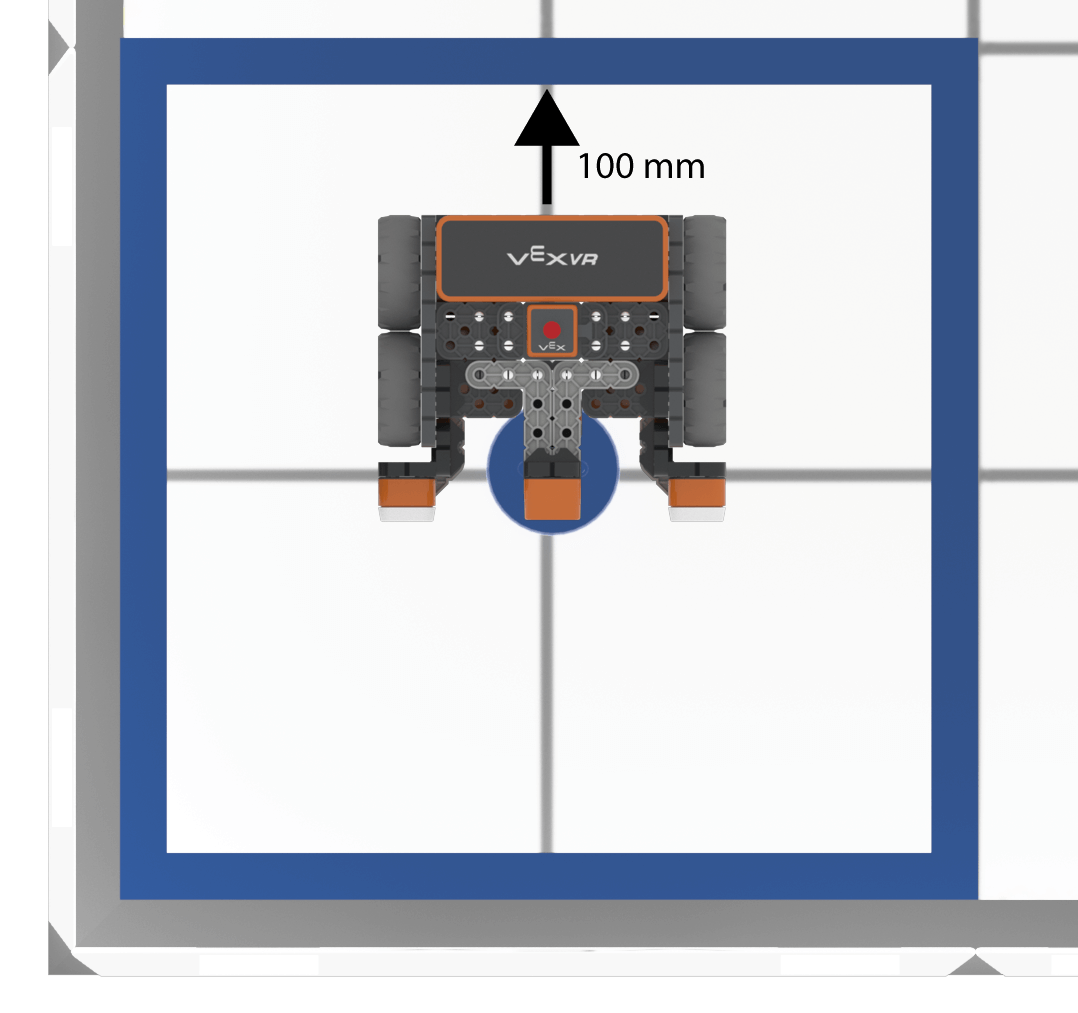
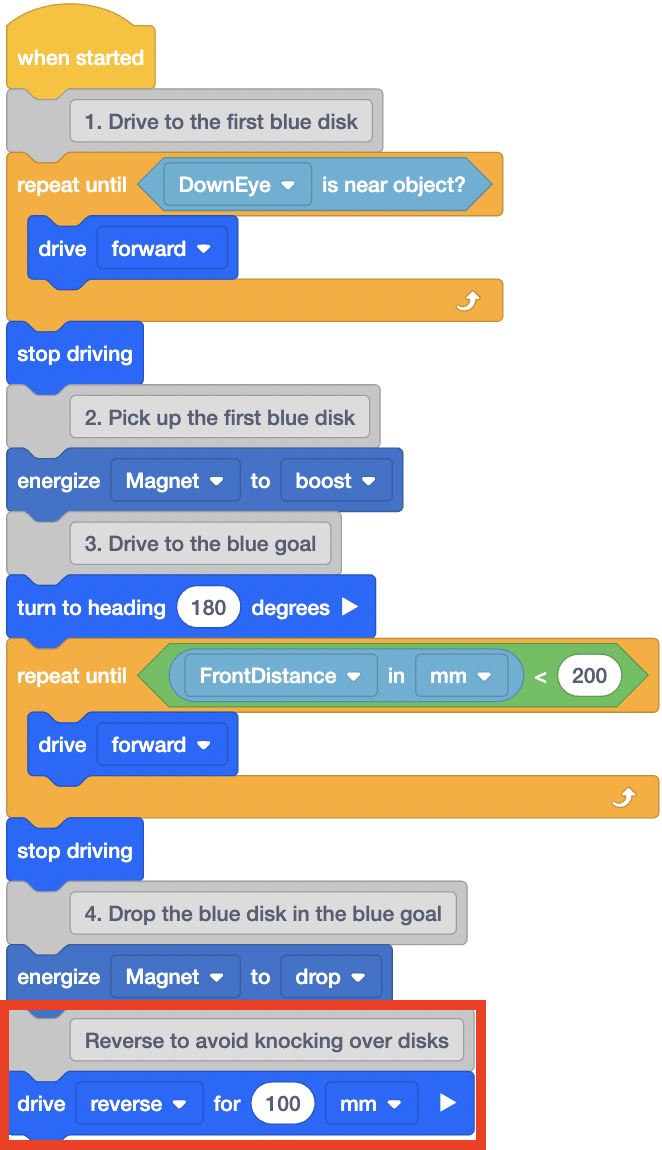
ในการรวบรวมดิสก์สีถัดไปหุ่นยนต์ VR จะต้องขับไปยังเป้าหมายสีถัดไป อย่างไรก็ตามเพื่อป้องกันการชนกับดิสก์สีน้ำเงินตอนนี้หุ่นยนต์ VR จะต้องเคลื่อนที่ออกจากทางของดิสก์ ในการทำเช่นนี้หุ่นยนต์ VR จะต้องย้อนกลับ 100 มิลลิเมตร (มม.) หรือครึ่งหนึ่งของความยาวของตารางสี่เหลี่ยมบนสนามเด็กเล่น
-
เพิ่มบล็อก [Drive for] ลงในรหัสและตั้งค่าพารามิเตอร์เป็น "ย้อนกลับ" เป็นเวลา 100 มิลลิเมตร (มม.)
-
ตอนนี้หุ่นยนต์ VR จะต้องเลี้ยวซ้ายเพื่อไปยังเป้าหมายสีถัดไป

-
เพิ่มบล็อก [Turn to heading] ลงในรหัสและตั้งค่าพารามิเตอร์เป็น 90 องศาเพื่อให้หุ่นยนต์ VR เผชิญกับเป้าหมายถัดไป

เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป