
Lektion 4: Verschieben einer blauen Festplatte
Verschieben Sie eine Festplatte jeder Farbe
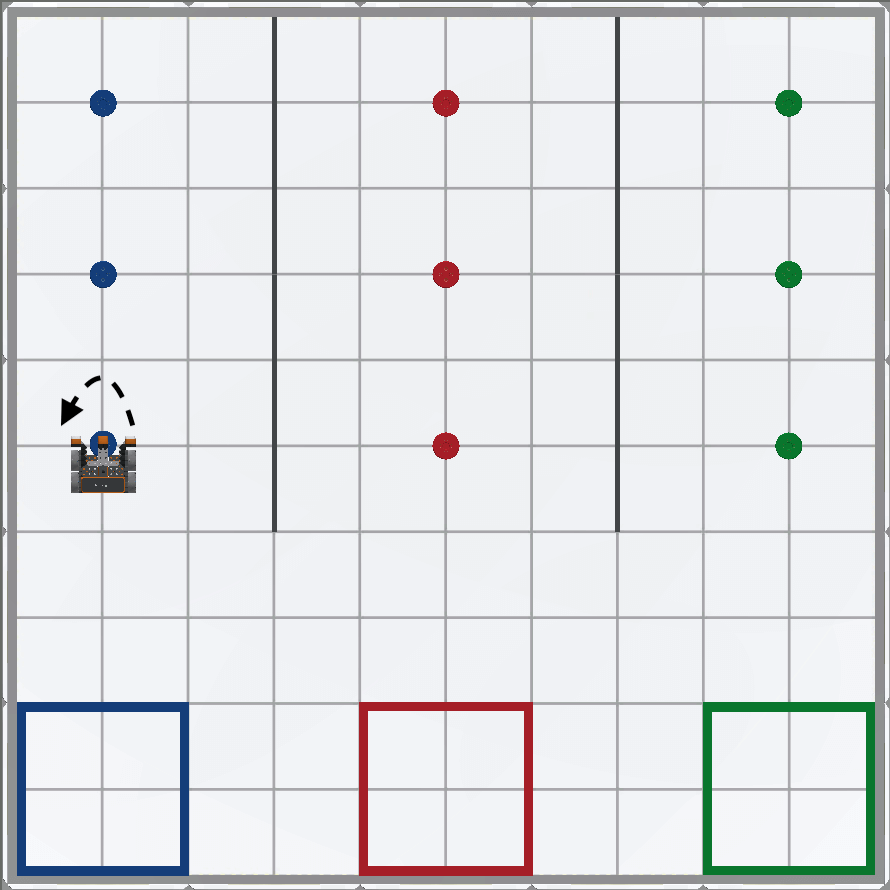
In Lektion 3 haben Sie ein Projekt erstellt, bei dem der VR-Roboter jede der drei blauen Festplatten aufnehmen und in das blaue Ziel auf dem Disk Mover Playground legen soll.
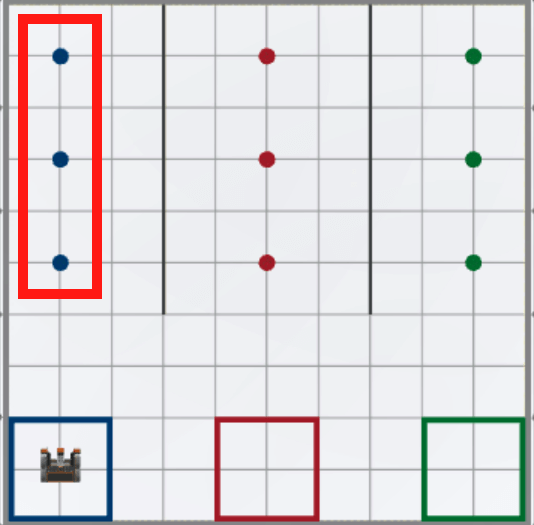
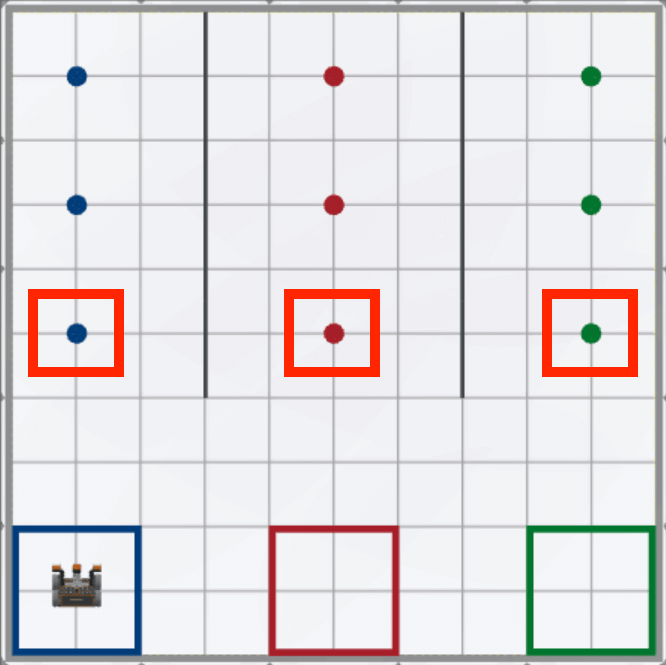
In dieser Lektion erstellen Sie nun ein Projekt, um eine Festplatte jeder Farbe aufzunehmen und in das entsprechende farbige Ziel im Disk Mover Playground zu verschieben!
- Der VR-Roboter muss das Verhalten wiederholen, wenn er zur Festplatte fährt, sie aufnimmt, sich umdreht und dann für jede Farbe einmal zum farbigen Ziel zurückfährt. Damit der VR-Roboter die Aktionen des Aufnehmens und Ablegens einer Festplatte jeder Farbe wiederholen kann, muss der VR-Roboter die folgenden Verhaltensweisen dreimal ausführen:
-
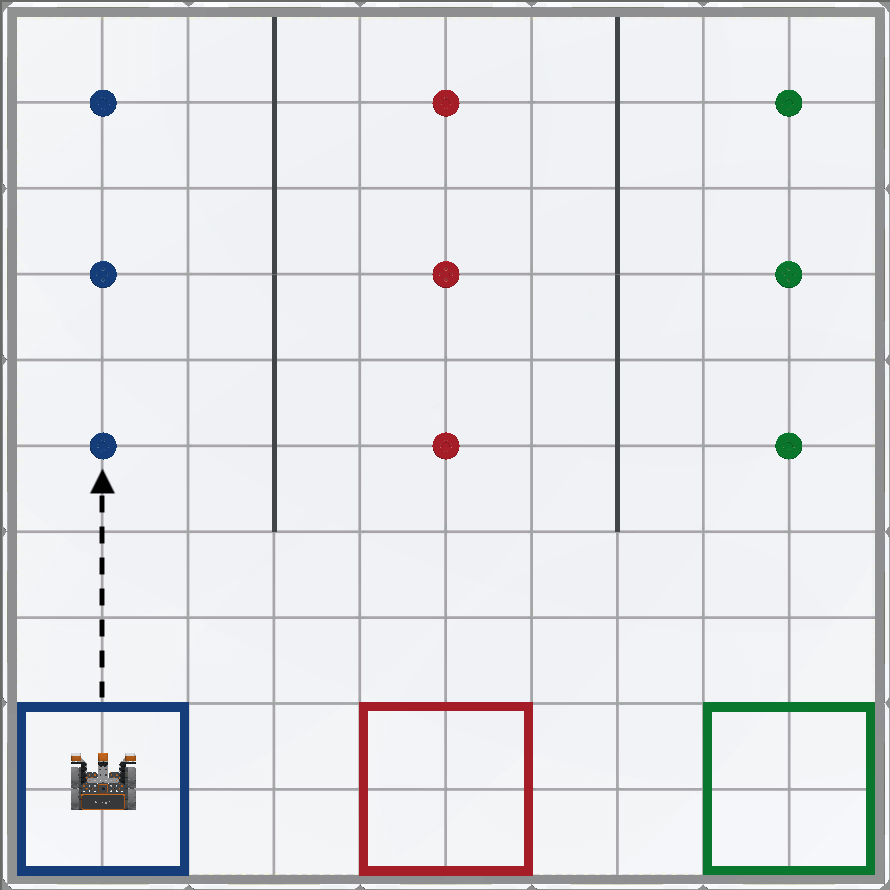
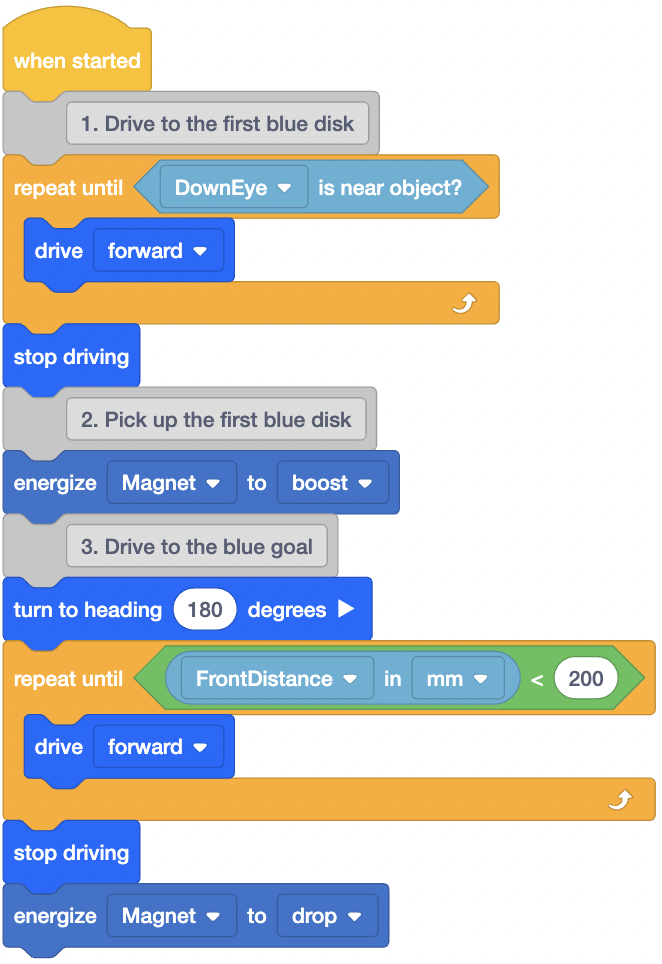
Fahren Sie zuerst mit dem Down Eye Sensor zur ersten blauen Festplatte vor.
-
Nehmen Sie dann die erste blaue Scheibe auf.
-
Als nächstes drehen Sie sich um.
-
Fahren Sie dann mit dem Abstandssensor zurück zum Ziel und lassen Sie die Festplatte fallen.

-
-
Starten Sie ein neues Projekt in VEXcode VR und benennen Sie das Projekt Unit8Lesson4.

-
Erstellen Sie den folgenden Code, der den VR-Roboter anweist, die vier oben aufgeführten Verhaltensweisen auszuführen.
- Öffnen Sie den Disk Mover Playground und führen Sie das Projekt aus.
-
Wenn dieses Projekt ausgeführt wird, fährt der VR-Roboter und nimmt die erste blaue Festplatte auf, dreht sich um, fährt zum blauen Ziel und lässt die Festplatte fallen.

-
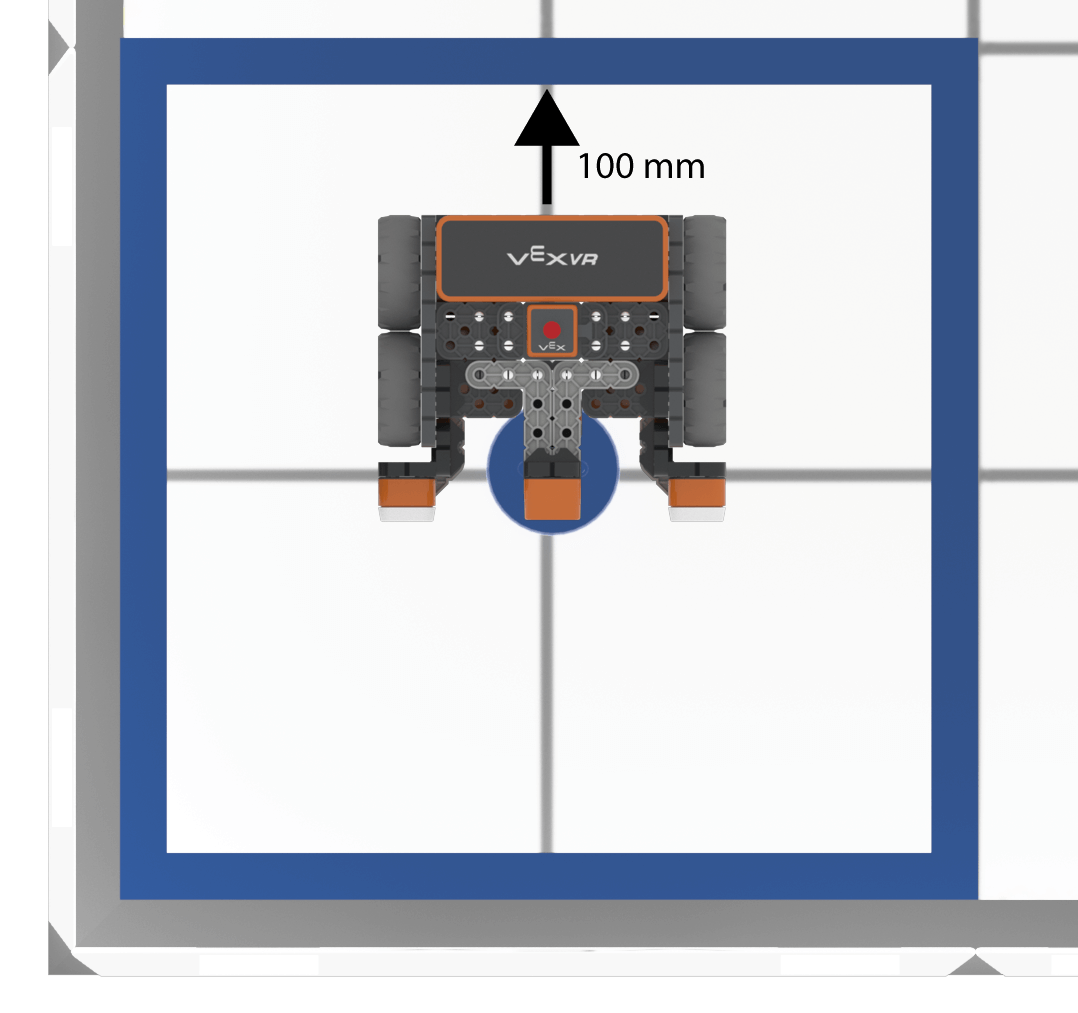
Um die nächste farbige Festplatte zu sammeln, muss der VR-Roboter zum nächsten farbigen Ziel fahren. Um jedoch eine Kollision mit der blauen Festplatte zu verhindern, muss sich der VR-Roboter nun aus dem Weg der Festplatte bewegen. Dazu muss der VR-Roboter 100 Millimeter (mm) oder die Hälfte der Länge eines Gitterquadrats auf dem Spielplatz umkehren.
-
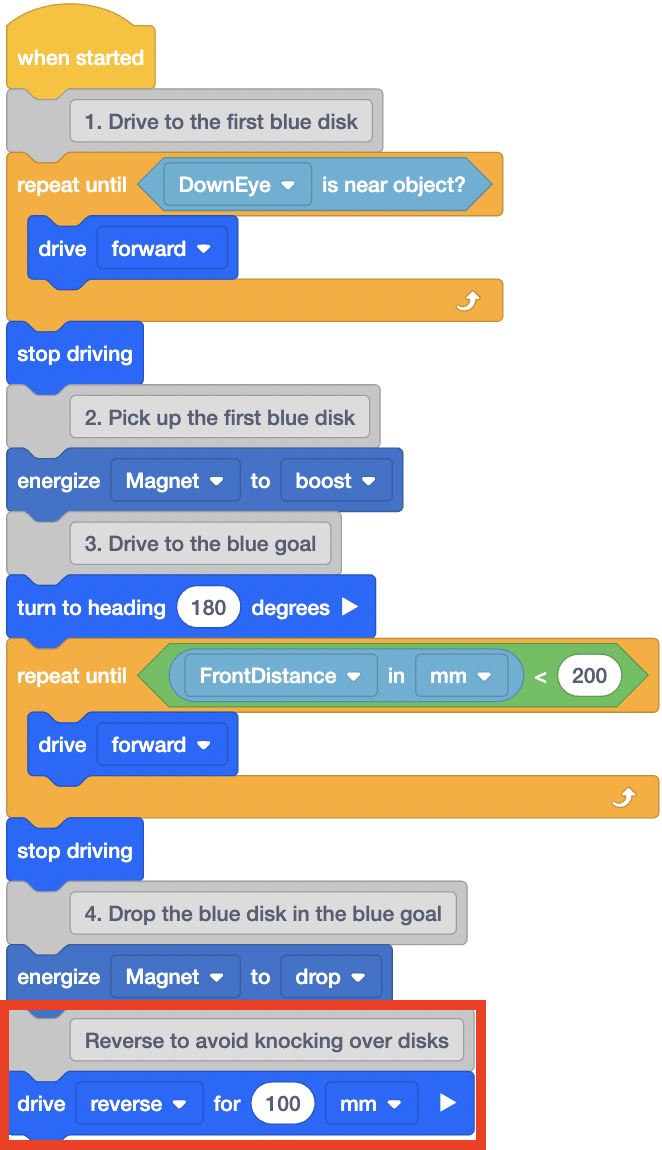
Fügen Sie dem Code einen [Drive for] -Block hinzu und stellen Sie den Parameter für 100 Millimeter (mm) auf "Reverse".
-
Der VR-Roboter muss nun nach links abbiegen, um das nächste farbige Ziel zu erreichen.

-
Fügen Sie dem Code einen [Turn to heading] -Block hinzu und stellen Sie den Parameter auf 90 Grad ein, damit der VR-Roboter das nächste Ziel erreichen kann.

Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.