
الدرس 4: نقل القرص الأحمر والأخضر
-
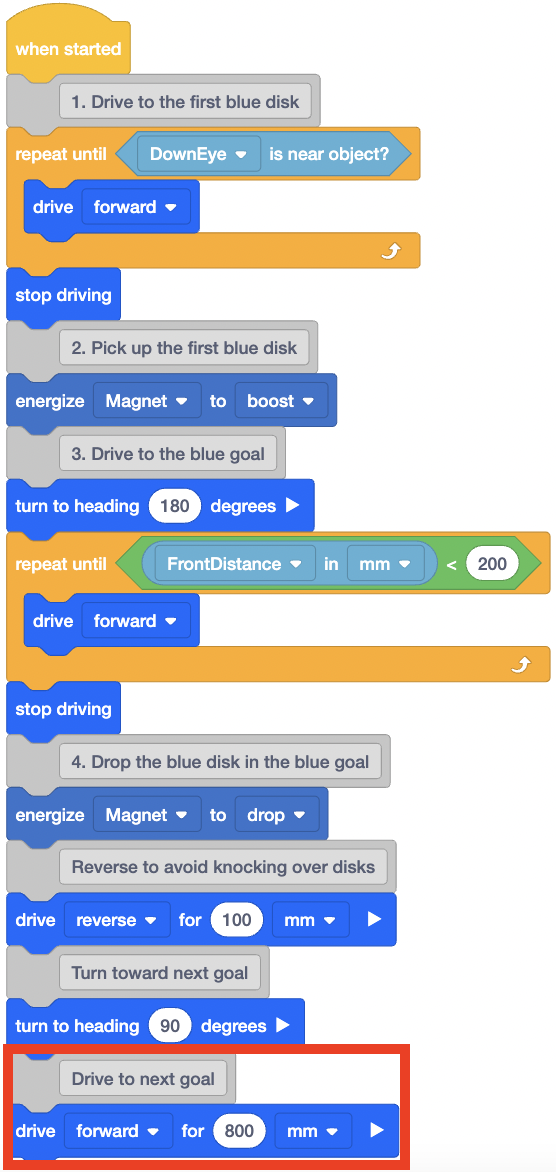
بعد ذلك، سيحتاج روبوت الواقع الافتراضي إلى المضي قدمًا نحو الهدف الملون التالي. لاحظ أنه سيتعين على روبوت الواقع الافتراضي دفع أربعة مربعات شبكية إلى الأمام، أو 800 ملليمتر (مم) من أجل القيادة إلى مركز الهدف الملون التالي.

-
أضف كتلة [Drive for] إلى التعليمة البرمجية واضبط المعلمة على 800 ملليمتر (مم).
-
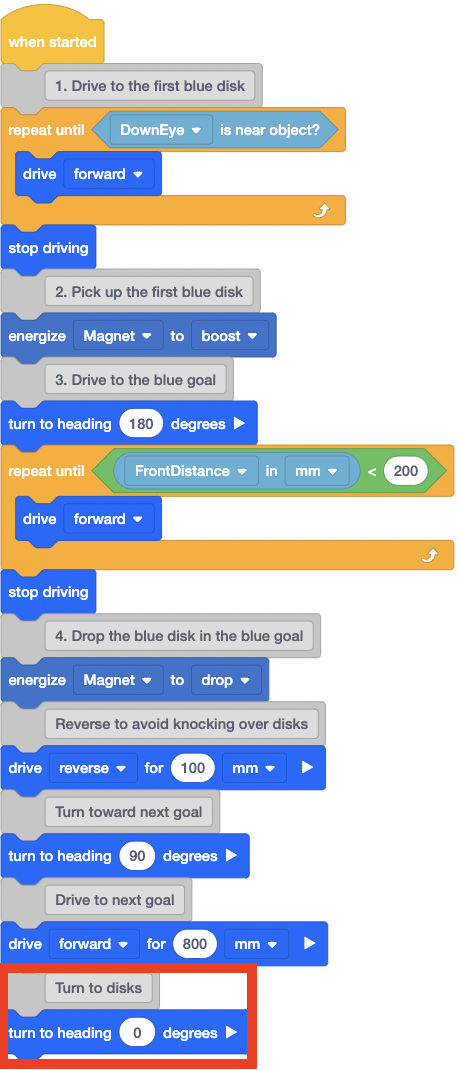
سيحتاج روبوت الواقع الافتراضي الآن إلى الدوران لمواجهة الأقراص الملونة.

-
أضف كتلة ثانية [Turn to heading] إلى التعليمة البرمجية واضبط المعلمة على صفر درجة. سيؤدي هذا إلى تحويل روبوت الواقع الافتراضي لمواجهة الأقراص الملونة.
- افتح Disk Mover Playground وقم بتشغيل المشروع.
-
سوف يلتقط روبوت الواقع الافتراضي القرص الأزرق الأول وينقله إلى الهدف الأزرق، ثم يتخطى الهدف الأحمر. سيتحول روبوت الواقع الافتراضي أيضًا لمواجهة الأقراص الحمراء.

-
الآن بعد أن واجه روبوت الواقع الافتراضي الأقراص الحمراء، سيحتاج روبوت الواقع الافتراضي إلى تكرار نفس السلوكيات التي تم استخدامها لجمع القرص الأزرق، من أجل التقاط القرص الأحمر وتحريكه. سلوكيات القيادة للأمام لالتقاط القرص والاستدارة والعودة إلى نفس الهدف الملون لإسقاط القرص.

-
بمجرد نقل القرص الأحمر الأول، سيحتاج روبوت الواقع الافتراضي بعد ذلك إلى القيادة إلى الهدف الأخضر وتنفيذ نفس الإجراءات التي تم استخدامها لتحريك القرص الأزرق والأحمر، لتحريك القرص الأخضر الأول.

-
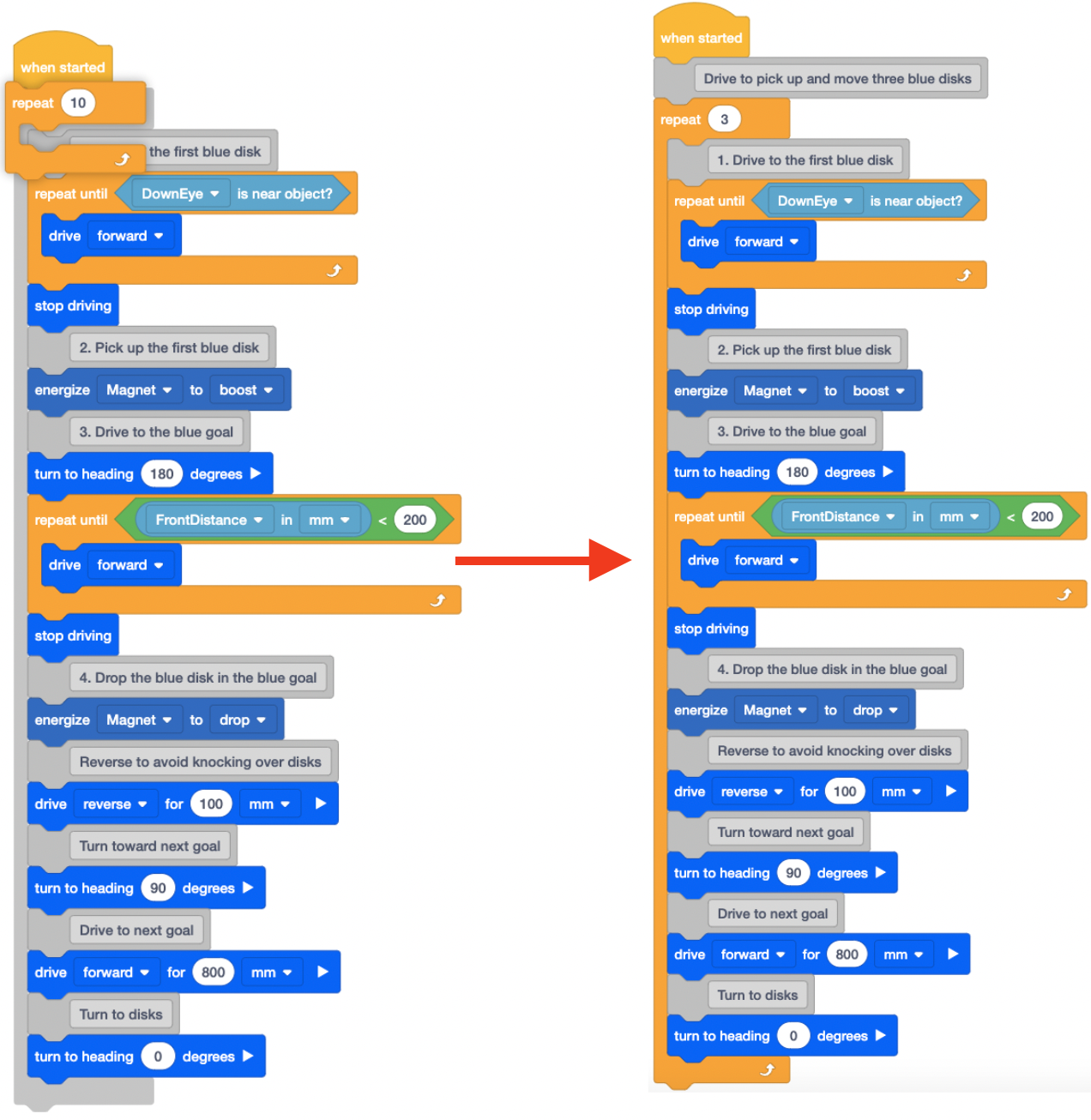
لتكرار السلوكيات عدة مرات، يمكن استخدام كتلة [تكرار].

-
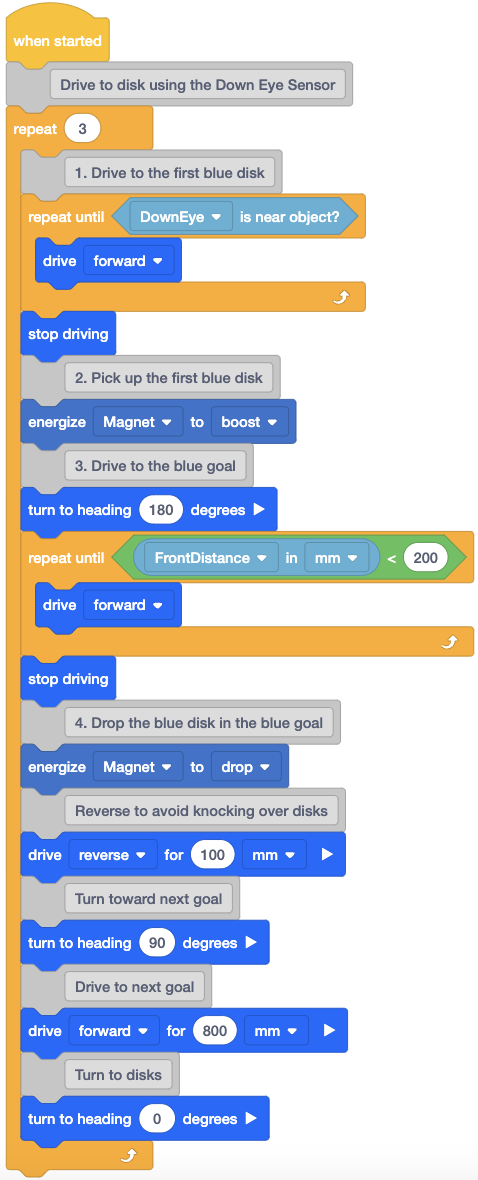
أضف كتلة [Repeat] إلى التعليمة البرمجية واضبط المعلمة على "3".
- افتح Disk Mover Playground وقم بتشغيل المشروع.
-
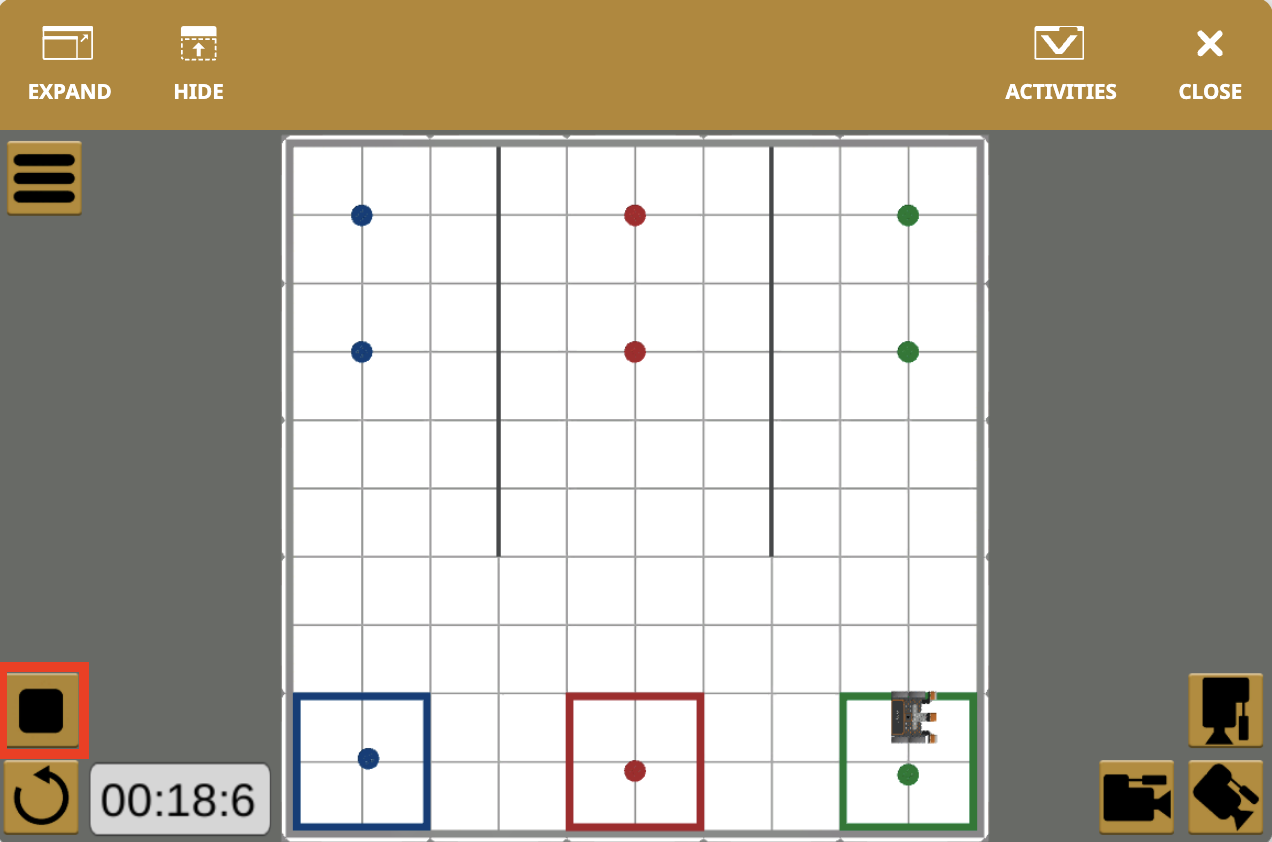
عند تشغيل هذا المشروع، يلتقط روبوت الواقع الافتراضي ويسقط قرصًا واحدًا من كل لون في هدفه الملون المقابل.

-
لاحظ أن روبوت الواقع الافتراضي استمر في القيادة إلى الحائط. هذا السلوك متوقع لأن المشروع أوعز إلى روبوت الواقع الافتراضي بالانعطاف يمينًا والقيادة نحو الهدف التالي، ثلاث مرات. المرة الأولى هي القيادة من الأزرق إلى الأحمر. والثاني من الأحمر إلى الأخضر، والثالث من الأخضر إلى الجدار، حيث لا يوجد هدف ملون آخر. أوقف المشروع بمجرد أن يصطدم روبوت الواقع الافتراضي بالحائط. يمكن تحسين المشروع بحيث يتوقف روبوت الواقع الافتراضي بعد التقاطه وتحريك القرص الأخضر، ولكن هذا من شأنه أن يزيد من التعقيد العام للمشروع.
لمعلوماتك
وضع حلقة واحدة داخل حلقة أخرى يسمى التعشيش. عندما "تتداخل" الحلقات، تتحكم الحلقة الخارجية في عدد المرات التي تنفذ فيها الحلقة الداخلية. هناك العديد من الأنواع المختلفة من الحلقات التي يمكن تداخلها. على سبيل المثال، في التعليمة البرمجية السابقة أعلاه، يتم تداخل كتل [Repeat until] داخل كتلة [Repeat].
يمكن أيضًا تداخل كتلة [تكرار] داخل كتلة [تكرار] أخرى. في المثال التالي، نظرًا لتعيين كتلة [Repeat] الخارجية على "3"، سيرسم روبوت الواقع الافتراضي ثلاثة مربعات على الملعب.

الحلقات المتداخلة مفيدة في المشاريع التي يكرر فيها روبوت الواقع الافتراضي نفس السلوكيات أكثر من مرة. تقوم حلقات التعشيش بتنظيم وتكثيف المشروع. يمكن أن يكون هذا مفيدًا لفهم سياق التعليمات البرمجية والغرض منها بشكل أفضل، بالإضافة إلى تسهيل العثور على الأخطاء.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.