
Lição 4: Mova um disco vermelho e verde
-
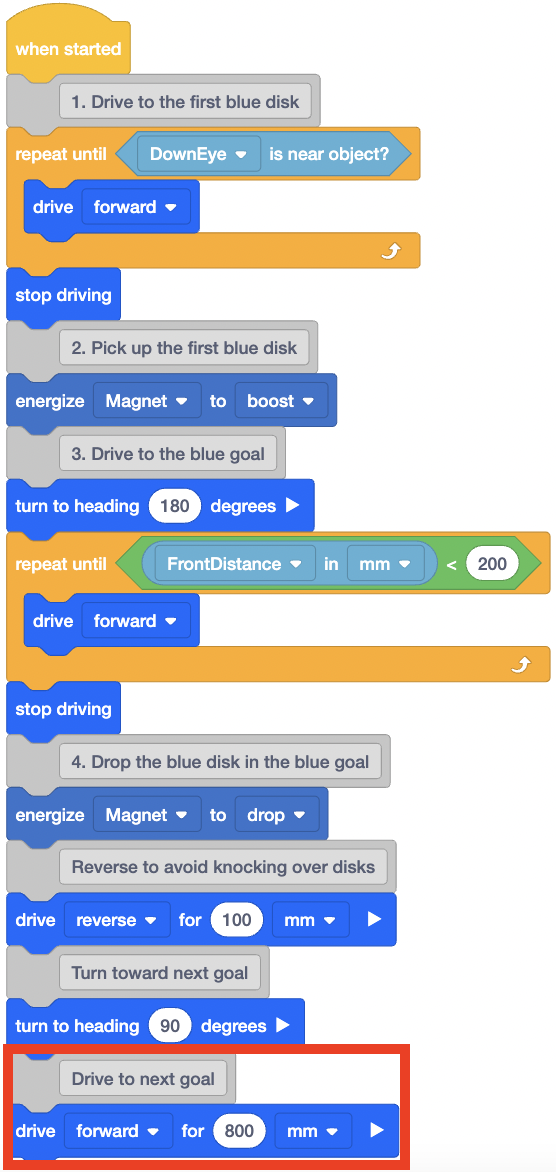
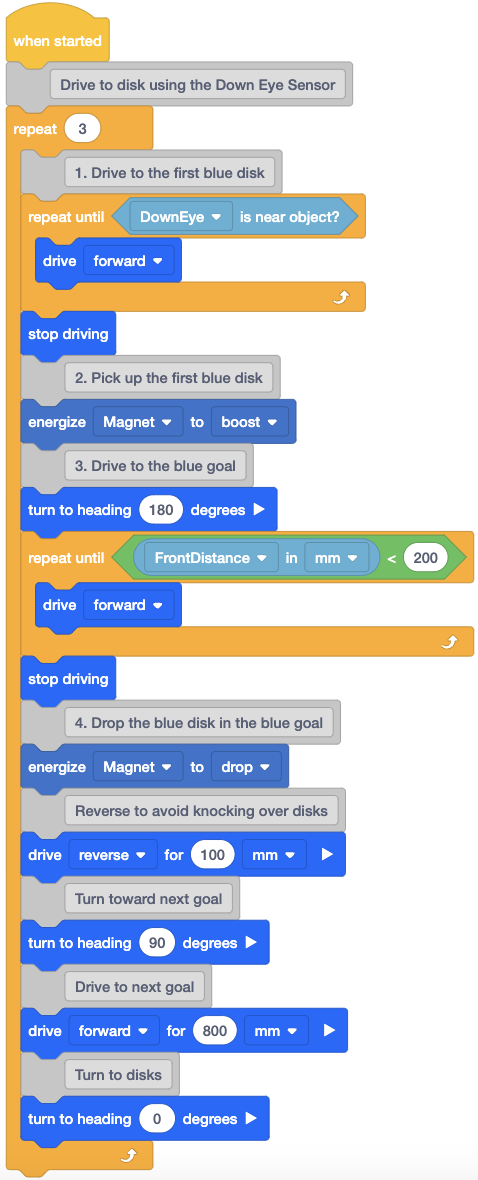
Em seguida, o robô VR precisará avançar para a próxima meta colorida. Observe que o Robô VR terá que avançar quatro quadrados de grade, ou 800 milímetros (mm), para chegar ao centro da próxima meta colorida.

-
Adicione um bloco [Drive for] ao código e defina o parâmetro para 800 milímetros (mm).
-
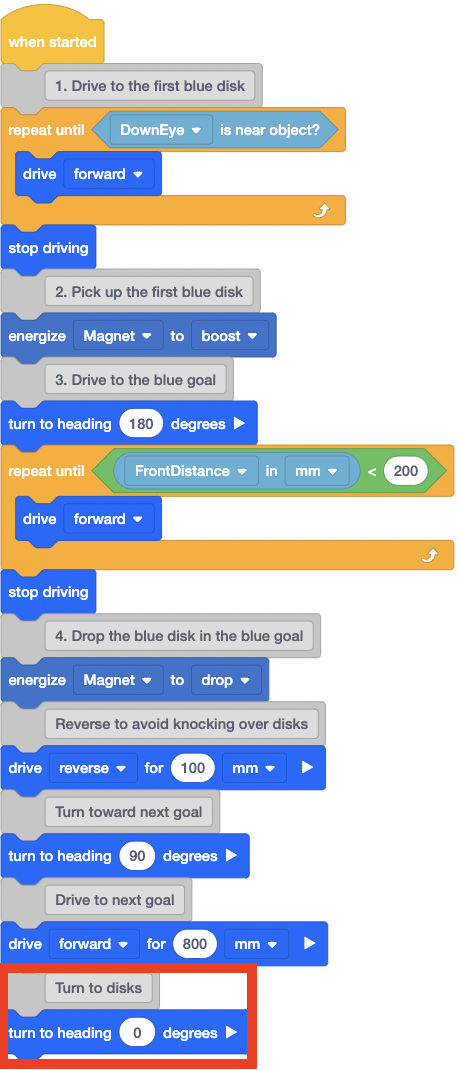
O robô VR agora precisará girar para ficar de frente para os discos coloridos.

-
Adicione um segundo bloco [Turn to heading] ao código e defina o parâmetro para zero graus. Isso fará com que o robô VR fique voltado para os discos coloridos.
- Abra o Disk Mover Playground e execute o projeto.
-
O robô VR irá pegar e mover o primeiro disco azul para a baliza azul e, em seguida, passar por cima da baliza vermelha. O robô VR também ficará voltado para os discos vermelhos.

-
Agora que o Robô VR está voltado para os discos vermelhos, o Robô VR precisará repetir os mesmos comportamentos que foram usados para coletar o disco azul, a fim de pegar e mover o disco vermelho. Os comportamentos de avançar para pegar o disco, virar e voltar para o mesmo objetivo colorido de soltar o disco.

-
Uma vez que o primeiro disco vermelho é movido, o Robô VR precisará então dirigir para a meta verde e executar as mesmas ações que foram usadas para mover o disco azul e vermelho, para mover o primeiro disco verde.

-
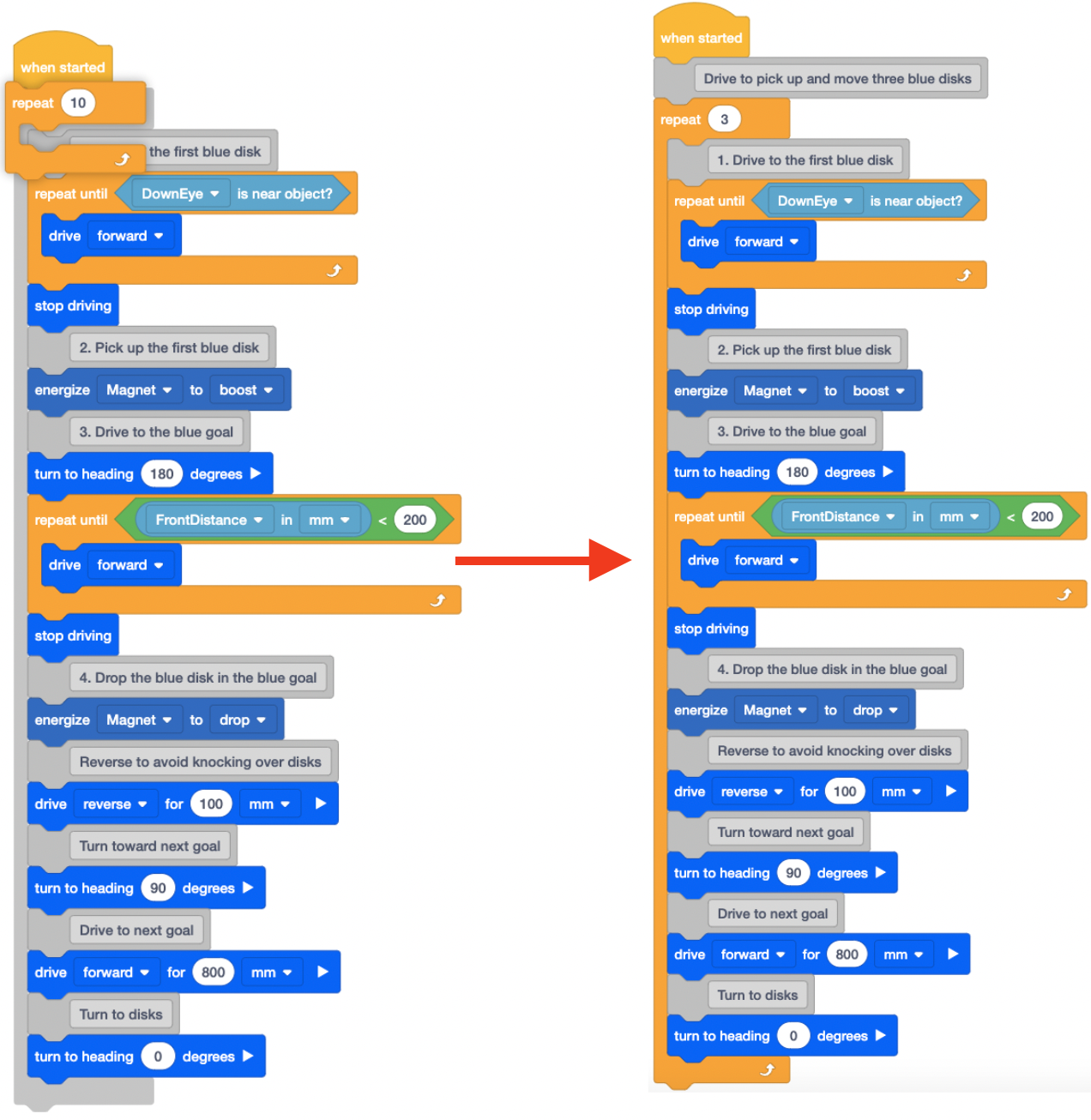
Para repetir comportamentos várias vezes, um bloco [Repetir] pode ser usado.

-
Adicione um bloco [Repeat] ao código e defina o parâmetro para ‘3’.
- Abra o Disk Mover Playground e execute o projeto.
-
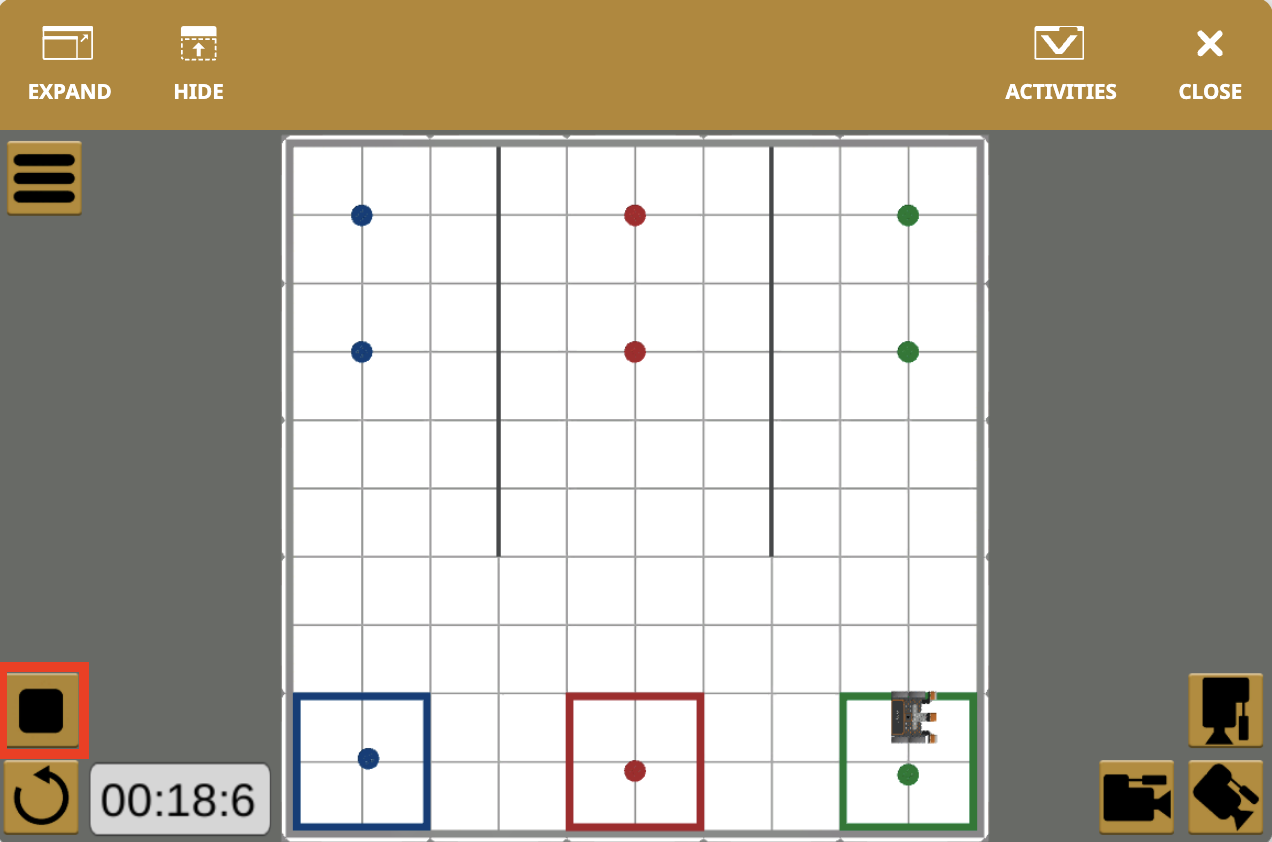
Quando este projeto é executado, o Robô VR pega e solta um disco de cada cor no seu objetivo colorido correspondente.

-
Observe que o robô VR continuou a bater na parede. Este comportamento é esperado, uma vez que o projeto instruiu o Robô VR a virar à direita e dirigir em direção ao próximo objetivo, três vezes. A primeira vez é de azul para vermelho. A segunda é do vermelho para o verde, e a terceira é do verde para a parede, já que não há outra meta colorida. Interrompa o projeto assim que o robô de RV bater na parede. O projeto poderia ser melhorado para que o Robô VR pare depois de pegar e mover o disco verde, mas isso aumentaria a complexidade geral do projeto.
Para sua informação
Colocar um loop dentro de outro loop é chamado de aninhamento. Quando você "aninha" os loops, o loop externo controla o número de vezes que o loop interno é executado. Existem muitos tipos diferentes de loops que podem ser aninhados. Por exemplo, no código anterior acima, os blocos [Repeat until] estão aninhados dentro de um bloco [Repeat].
Um bloco [Repetir] também pode ser aninhado dentro de outro bloco [Repetir]. No exemplo a seguir, como o bloco externo [Repetir] está definido como ‘3’, o Robô de RV desenhará três quadrados no Playground.

Os ciclos aninhados são úteis em projetos em que um robô de RV repete os mesmos comportamentos mais de uma vez. Os loops de aninhamento organizam e condensam um projeto. Isso pode ser útil para entender melhor o contexto e o propósito do código, além de facilitar a localização de erros.
Selecione o botão Seguinte para continuar com o resto desta lição.