
Lección 4: Mueve un disco rojo y verde
-
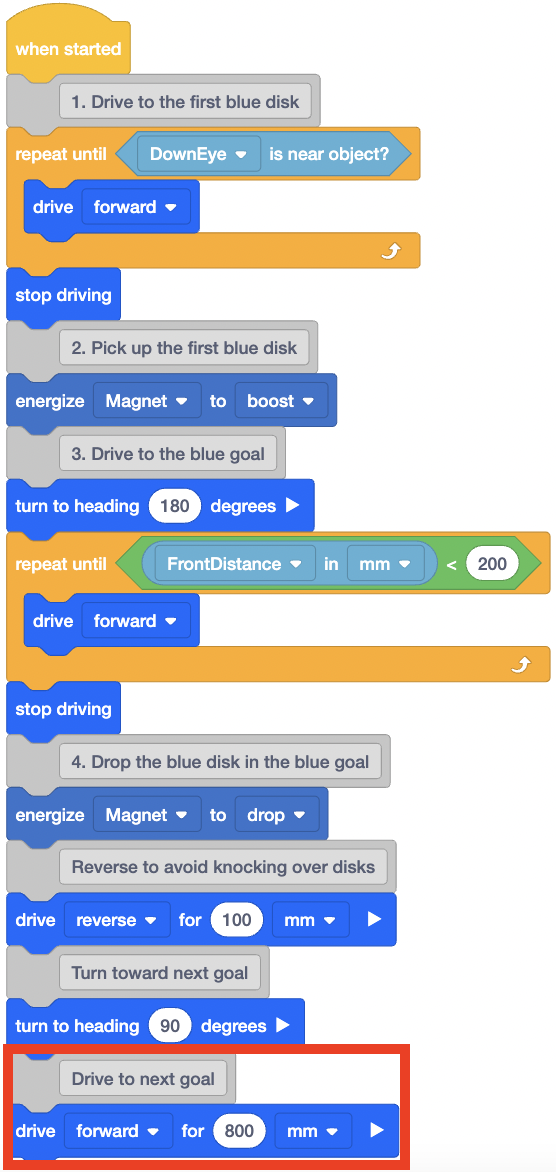
A continuación, el robot de realidad virtual deberá avanzar hasta el siguiente objetivo de color. Tenga en cuenta que el robot VR tendrá que avanzar cuatro cuadrados de cuadrícula, u 800 milímetros (mm) para llegar al centro de la siguiente portería de color.

-
Añada un bloque [Drive for] al código y establezca el parámetro en 800 milímetros (mm).
-
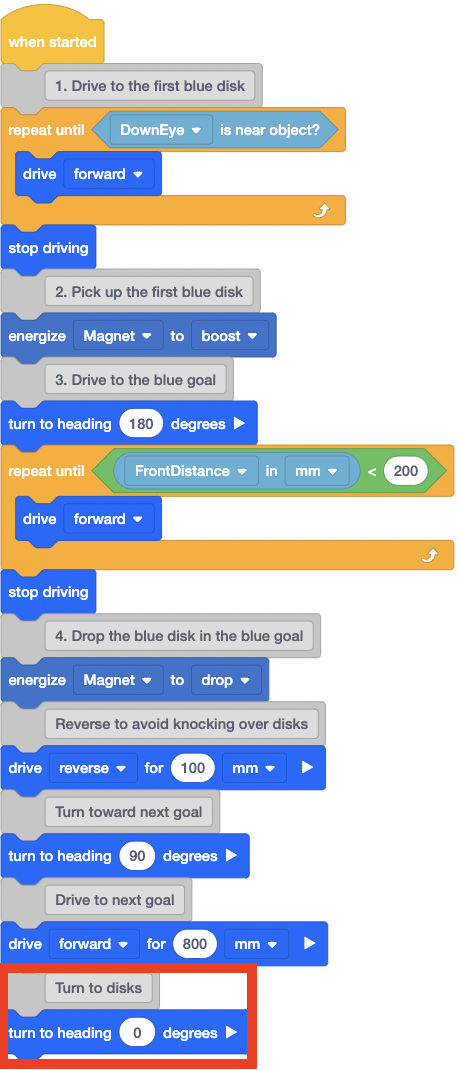
El robot VR ahora tendrá que girar para enfrentarse a los discos de colores.

-
Añada un segundo bloque [Turn to heading] al código y establezca el parámetro en cero grados. Esto hará que el robot VR se oriente hacia los discos de colores.
- Abra Disk Mover Playground y ejecute el proyecto.
-
El robot VR recogerá y moverá el primer disco azul a la portería azul y luego pasará por encima de la portería roja. El robot VR también girará para enfrentarse a los discos rojos.

-
Ahora que el robot VR está frente a los discos rojos, el robot VR tendrá que repetir los mismos comportamientos que se utilizaron para recoger el disco azul, con el fin de recoger y mover el disco rojo. Los comportamientos de conducir hacia adelante para recoger el disco, darse la vuelta y conducir de vuelta al mismo objetivo de color para dejar el disco.

-
Una vez que se mueve el primer disco rojo, el robot VR deberá conducir hasta el objetivo verde y realizar las mismas acciones que se utilizaron para mover el disco azul y rojo, para mover el primer disco verde.

-
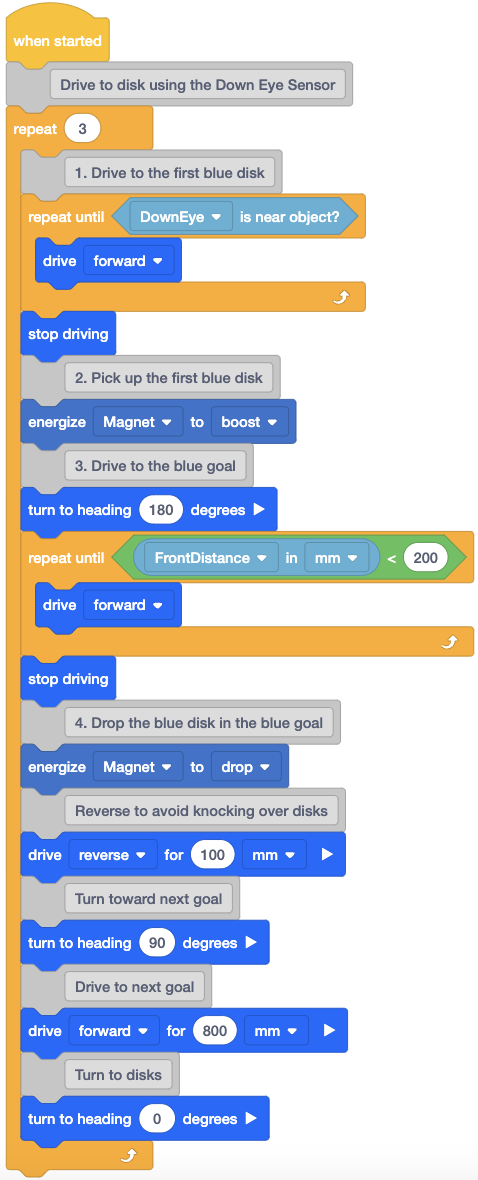
Para repetir comportamientos varias veces, se puede usar un bloque [Repeat].

-
Añade un bloque [Repeat] al código y establece el parámetro en ‘3’.

- Abra Disk Mover Playground y ejecute el proyecto.
-
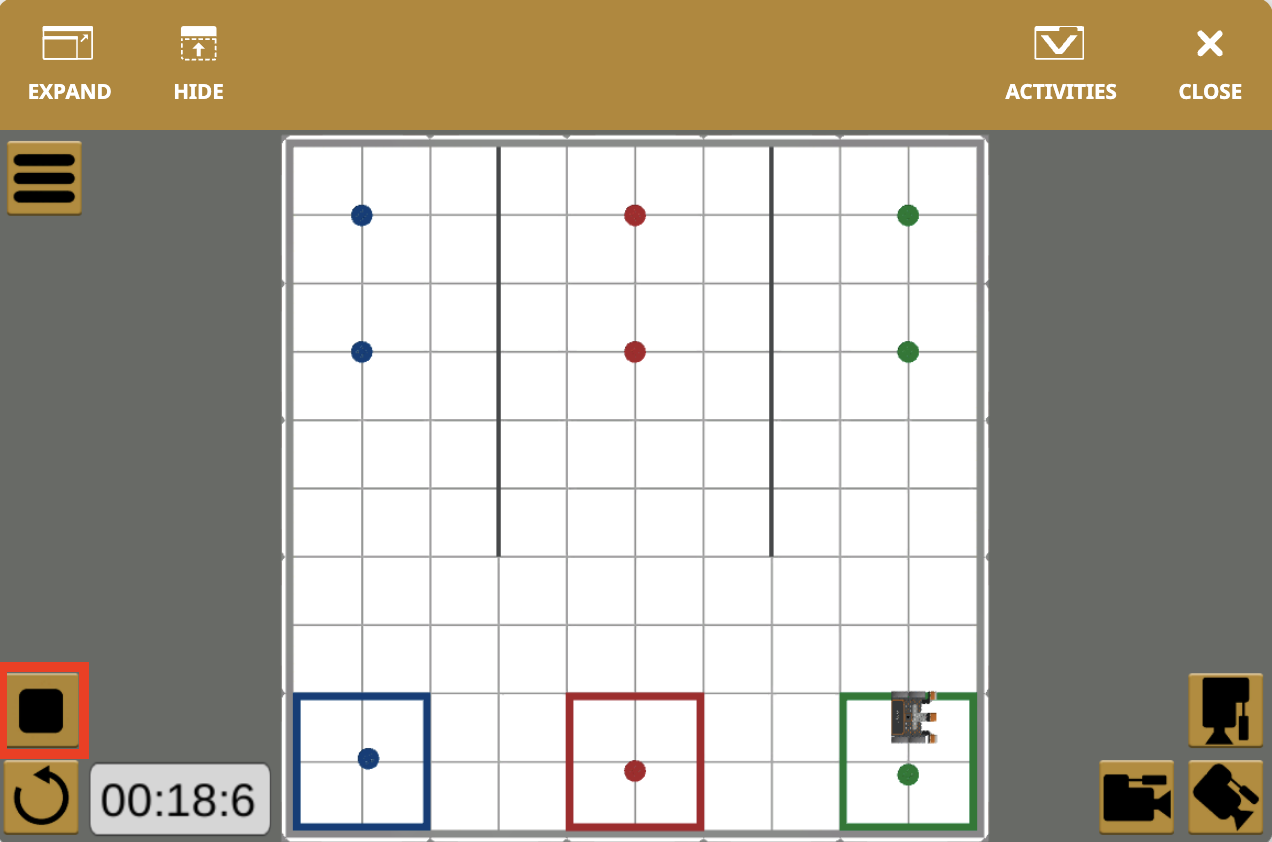
Cuando se ejecuta este proyecto, el robot VR recoge y deja caer un disco de cada color en su objetivo de color correspondiente.

-
Tenga en cuenta que el robot VR continuó chocando contra la pared. Se espera este comportamiento ya que el proyecto instruyó al robot de realidad virtual para que girara a la derecha y condujera hacia la siguiente meta, tres veces. La primera vez es conduciendo de azul a rojo. El segundo es de rojo a verde, y el tercero es de verde a la pared, ya que no hay otra portería de color. Detenga el proyecto una vez que el robot VR golpee la pared. El proyecto podría mejorarse para que el robot VR se detenga después de recoger y mover el disco verde, pero esto aumentaría la complejidad general del proyecto.
Para su información
Colocar un bucle dentro de otro bucle se llama anidamiento. Cuando "anidas" bucles, el bucle exterior controla el número de veces que se ejecuta el bucle interior. Hay muchos tipos diferentes de bucles que se pueden anidar. Por ejemplo, en el código anterior, los bloques [Repetir hasta] están anidados dentro de un bloque [Repetir].
Un bloque [Repeat] también se puede anidar dentro de otro bloque [Repeat]. En el siguiente ejemplo, dado que el bloque exterior [Repetir] está configurado en ‘3’, el robot VR dibujará tres cuadrados en el patio de recreo.

Los bucles anidados son útiles en proyectos en los que un robot de realidad virtual repite los mismos comportamientos más de una vez. Los bucles de anidación organizan y condensan un proyecto. Esto puede ser útil para comprender mejor el contexto y el propósito del código, así como para facilitar la búsqueda de errores.
Seleccione el botón Siguiente para continuar con el resto de esta lección.