
पाठ 4: लाल और हरे रंग की डिस्क को स्थानांतरित करें
-
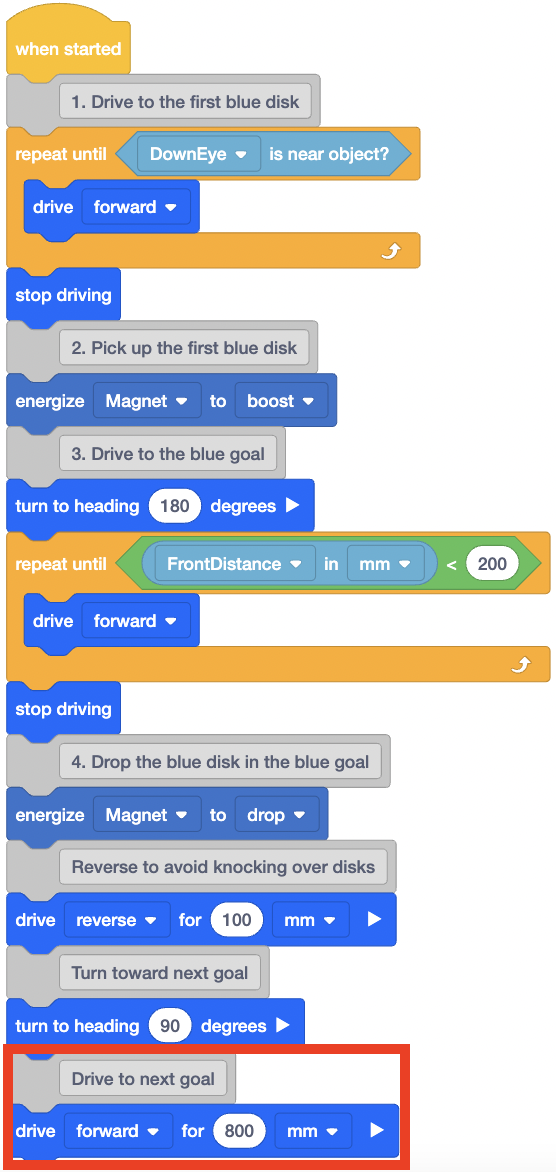
इसके बाद, वीआर रोबोट को अगले रंगीन लक्ष्य की ओर आगे बढ़ना होगा। ध्यान दें कि वीआर रोबोट को अगले रंगीन लक्ष्य के केंद्र तक पहुंचने के लिए चार ग्रिड वर्ग या 800 मिलीमीटर (मिमी) आगे बढ़ना होगा।

-
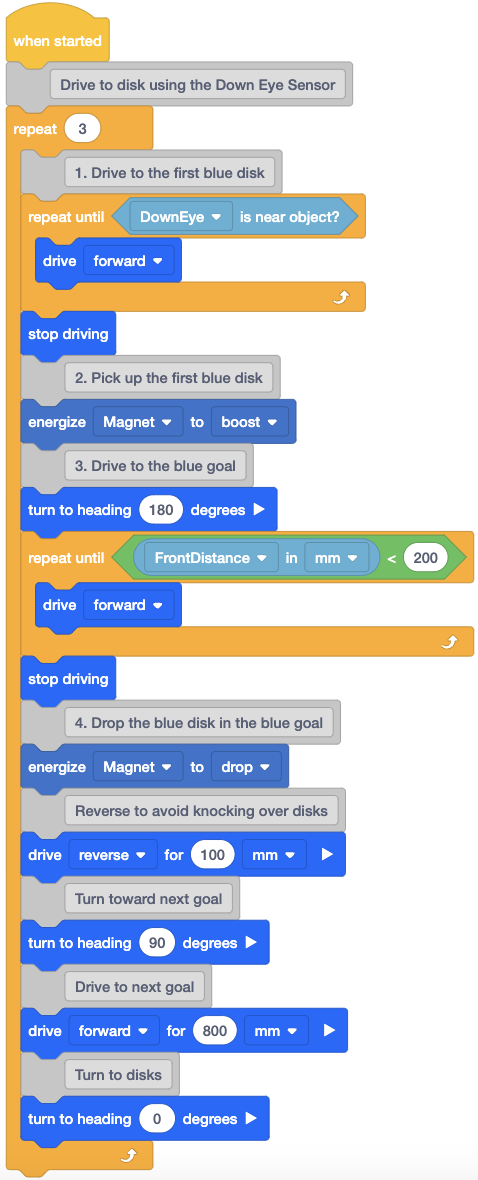
कोड में [ड्राइव फॉर] ब्लॉक जोड़ें और पैरामीटर को 800 मिलीमीटर (मिमी) पर सेट करें।
-
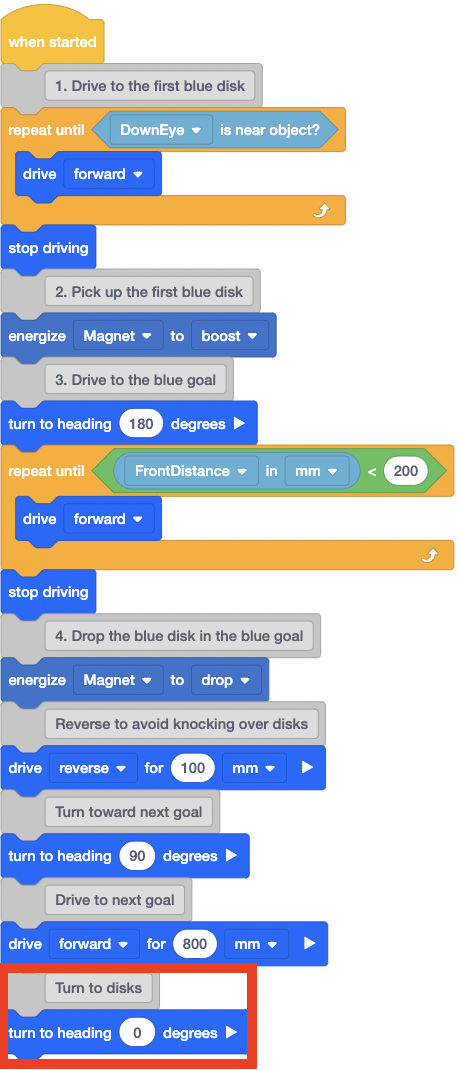
अब वीआर रोबोट को रंगीन डिस्क की ओर मुड़ना होगा।

-
कोड में दूसरा [Turn to heading] ब्लॉक जोड़ें और पैरामीटर को शून्य डिग्री पर सेट करें। इससे वीआर रोबोट रंगीन डिस्क की ओर मुड़ जाएगा।
- डिस्क मूवर प्लेग्राउंड खोलें और प्रोजेक्ट चलाएं।
-
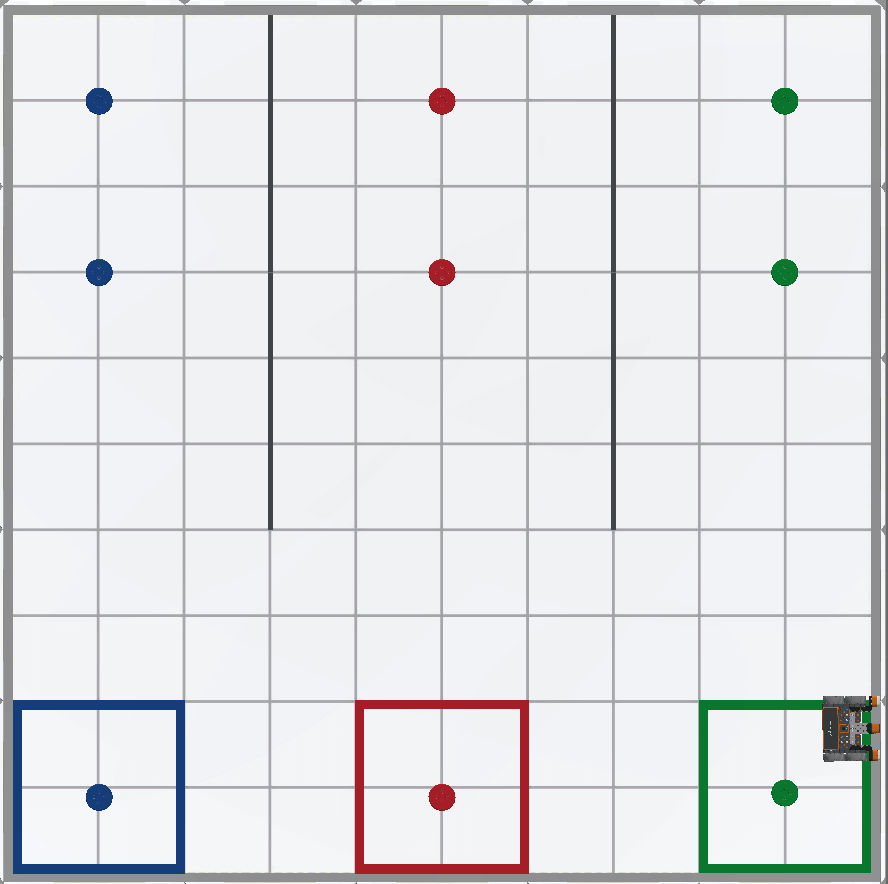
वी.आर. रोबोट पहली नीली डिस्क को उठाकर नीले गोल में ले जाएगा, और फिर लाल गोल के ऊपर से चलाएगा। वीआर रोबोट भी लाल डिस्क की ओर मुड़ जाएगा।

-
अब जबकि वीआर रोबोट लाल डिस्क के सामने है, तो लाल डिस्क को उठाने और स्थानांतरित करने के लिए वीआर रोबोट को वही व्यवहार दोहराना होगा जो नीली डिस्क को इकट्ठा करने के लिए उपयोग किया गया था। डिस्क को उठाने के लिए आगे बढ़ना, पीछे मुड़ना, तथा डिस्क को छोड़ने के लिए उसी रंग के गोल की ओर वापस जाना आदि व्यवहार।

-
एक बार जब पहली लाल डिस्क को स्थानांतरित कर दिया जाता है, तो वीआर रोबोट को हरे रंग के लक्ष्य तक ड्राइव करना होगा और पहले हरे रंग की डिस्क को स्थानांतरित करने के लिए वही क्रियाएं करनी होंगी जो नीली और लाल डिस्क को स्थानांतरित करने के लिए उपयोग की गई थीं।

-
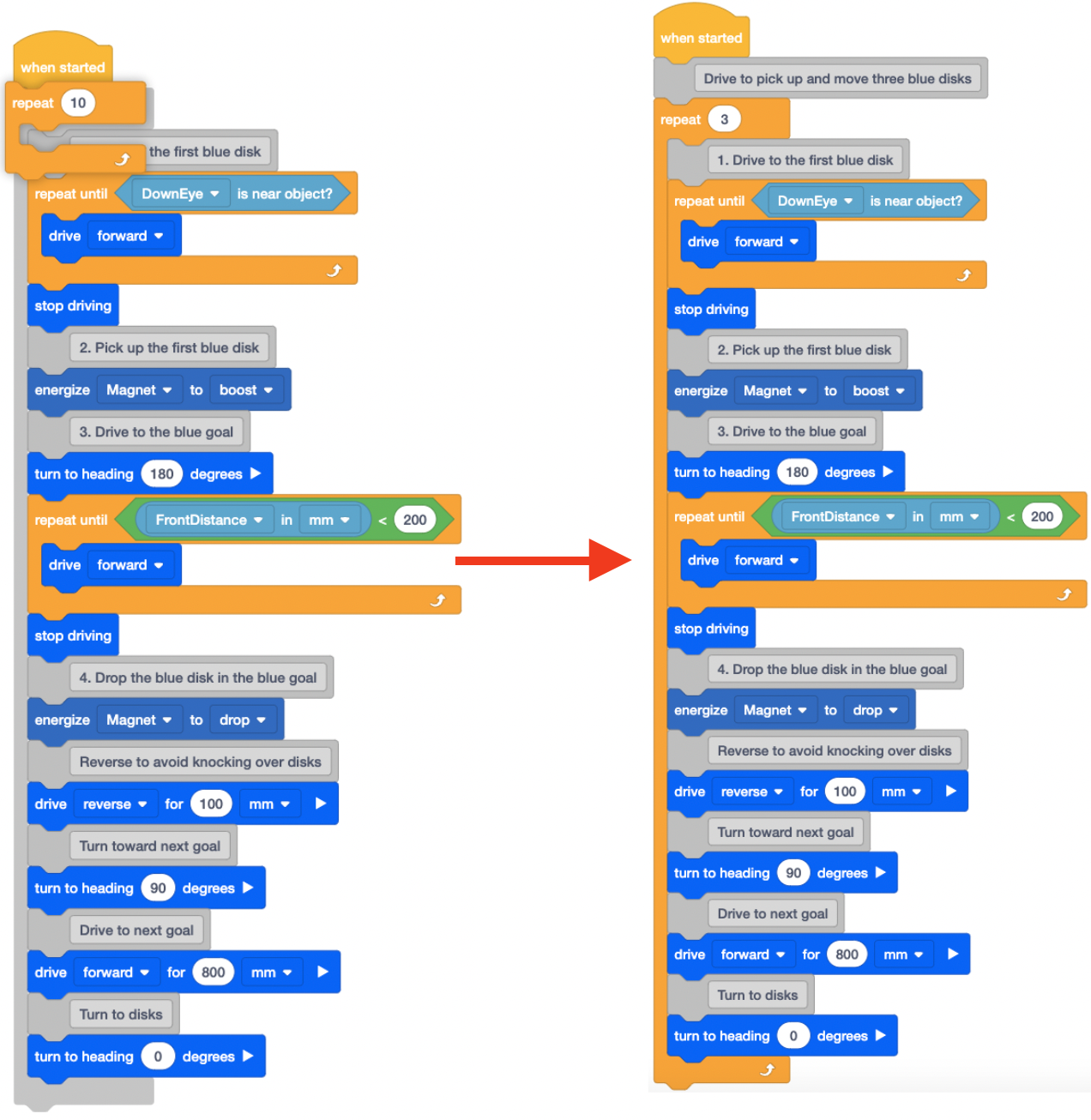
व्यवहार को कई बार दोहराने के लिए, [Repeat] ब्लॉक का उपयोग किया जा सकता है।

-
कोड में [Repeat] ब्लॉक जोड़ें और पैरामीटर को '3' पर सेट करें।
- डिस्क मूवर प्लेग्राउंड खोलें और प्रोजेक्ट चलाएं।
-
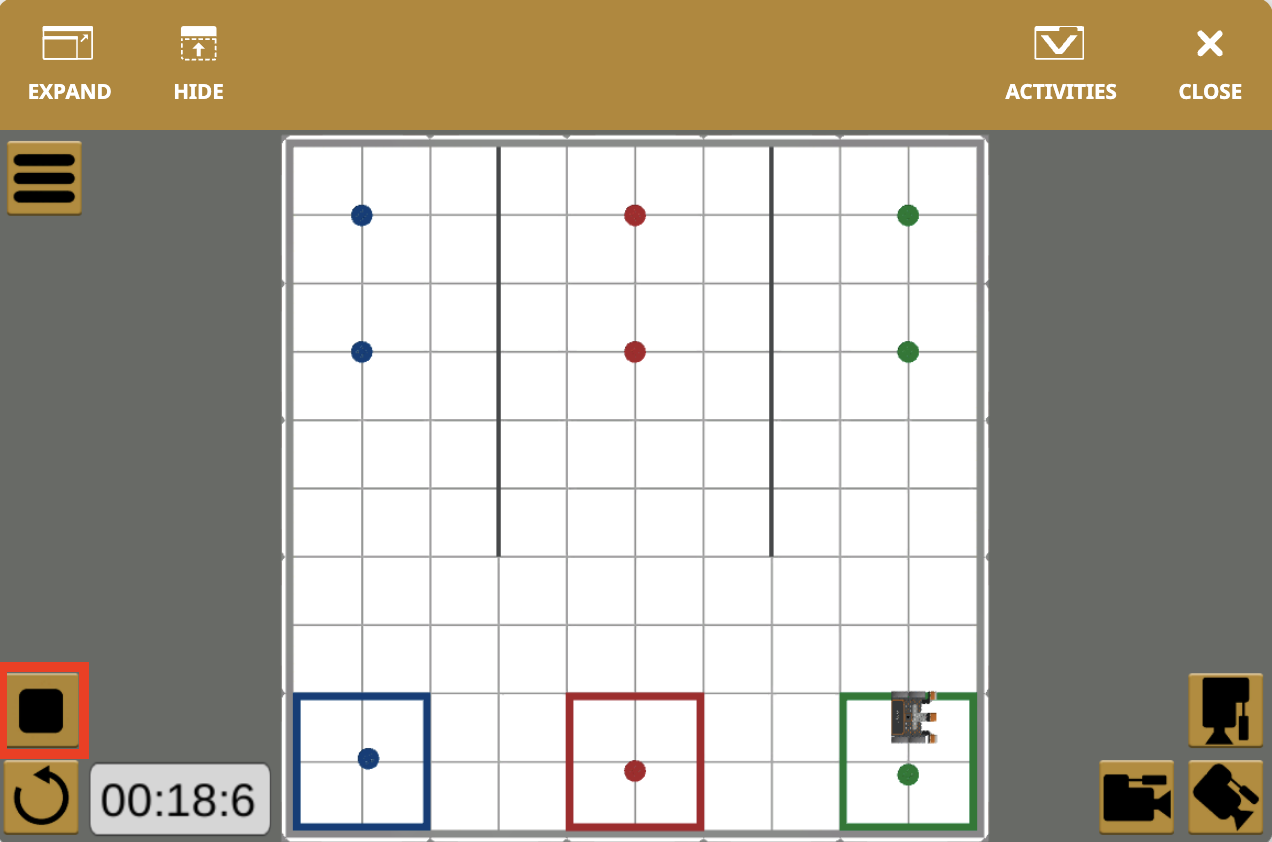
जब यह परियोजना चलती है, तो वीआर रोबोट प्रत्येक रंग की एक डिस्क उठाता है और उसे उसके संबंधित रंगीन लक्ष्य में छोड़ देता है।
-
ध्यान दें कि वी.आर. रोबोट दीवार से टकराता रहा। यह व्यवहार अपेक्षित है, क्योंकि परियोजना में वीआर रोबोट को तीन बार दाईं ओर मुड़कर अगले लक्ष्य की ओर जाने का निर्देश दिया गया था। पहली बार नीले से लाल रंग की ओर गाड़ी चलाना है। दूसरा लाल से हरे रंग की ओर है, और तीसरा हरे से दीवार की ओर है, क्योंकि वहां कोई अन्य रंगीन गोल नहीं है। जैसे ही VR रोबोट दीवार से टकरा जाए, परियोजना रोक दें। परियोजना में सुधार किया जा सकता है ताकि वीआर रोबोट हरे रंग की डिस्क को उठाने और हिलाने के बाद रुक जाए, लेकिन इससे परियोजना की समग्र जटिलता बढ़ जाएगी।
आपकी जानकारी के लिए
एक लूप को दूसरे लूप के अन्दर रखना नेस्टिंग कहलाता है। जब आप लूप को “नेस्ट” करते हैं, तो बाहरी लूप आंतरिक लूप के निष्पादन की संख्या को नियंत्रित करता है। कई अलग-अलग प्रकार के लूप हैं जिन्हें नेस्ट किया जा सकता है। उदाहरण के लिए, ऊपर दिए गए पिछले कोड में, [Repeat until] ब्लॉक एक [Repeat] ब्लॉक के अंदर नेस्टेड हैं।
एक [रिपीट] ब्लॉक को दूसरे [रिपीट] ब्लॉक के अंदर भी नेस्ट किया जा सकता है। निम्नलिखित उदाहरण में, चूंकि बाहरी [दोहराएँ] ब्लॉक '3' पर सेट है, इसलिए VR रोबोट खेल के मैदान पर तीन वर्ग बनाएगा।

नेस्टेड लूप उन परियोजनाओं में सहायक होते हैं जहां VR रोबोट एक ही व्यवहार को एक से अधिक बार दोहराता है। नेस्टिंग लूप्स किसी परियोजना को व्यवस्थित और संघनित करता है। यह कोड के संदर्भ और उद्देश्य को बेहतर ढंग से समझने में सहायक हो सकता है, साथ ही त्रुटियों को ढूंढना भी आसान बना सकता है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।