
Pelajaran 4: Memindahkan Cakram Merah dan Hijau
-
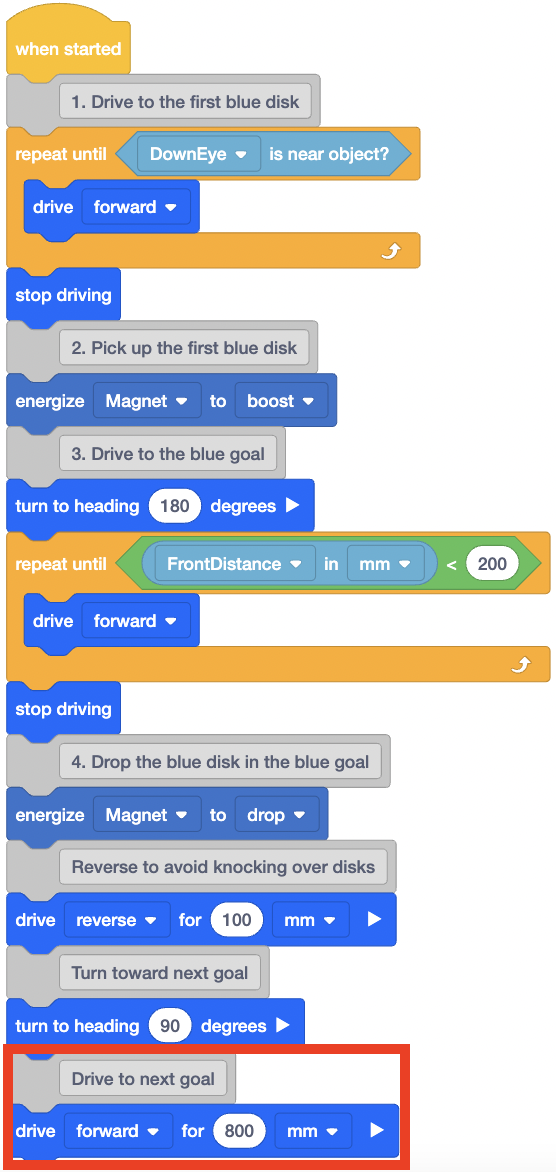
Berikutnya, Robot VR perlu melaju ke arah gawang berwarna berikutnya. Perhatikan bahwa Robot VR harus bergerak maju empat kotak kisi, atau 800 milimeter (mm) untuk dapat mencapai pusat gawang berwarna berikutnya.

-
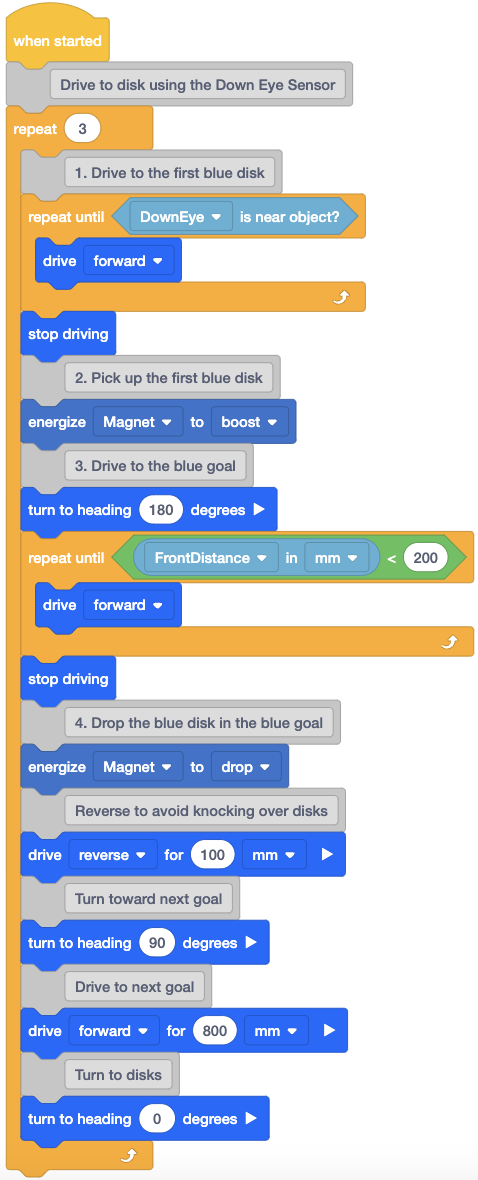
Tambahkan blok [Drive for] ke kode dan atur parameter ke 800 milimeter (mm).
-
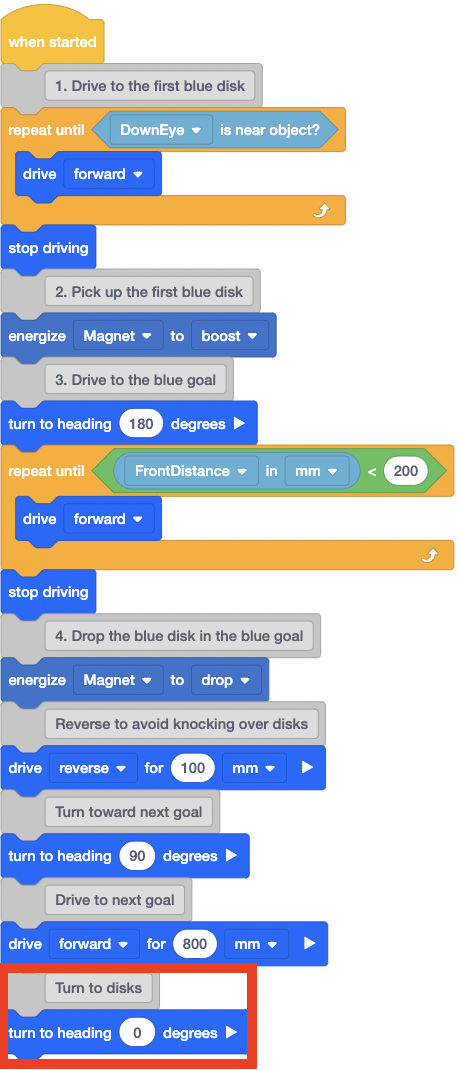
Robot VR sekarang perlu berbalik menghadap cakram berwarna.

-
Tambahkan blok [Putar ke arah arah] kedua ke kode dan atur parameter ke nol derajat. Ini akan memutar Robot VR untuk menghadap cakram berwarna.
- Buka Disk Mover Playground dan jalankan proyeknya.
-
Robot VR akan mengambil dan menggerakkan cakram biru pertama ke gawang biru, lalu melaju melewati gawang merah. Robot VR juga akan berbalik menghadap cakram merah.

-
Sekarang setelah Robot VR menghadap cakram merah, Robot VR perlu mengulangi perilaku yang sama yang digunakan untuk mengumpulkan cakram biru, untuk mengambil dan memindahkan cakram merah. Perilaku mengemudi maju untuk mengambil cakram, berbalik arah, dan mengemudi kembali ke tujuan berwarna sama untuk mengembalikan cakram.

-
Setelah cakram merah pertama digerakkan, Robot VR kemudian perlu melaju ke sasaran hijau dan melakukan tindakan yang sama yang digunakan untuk menggerakkan cakram biru dan merah, untuk menggerakkan cakram hijau pertama.

-
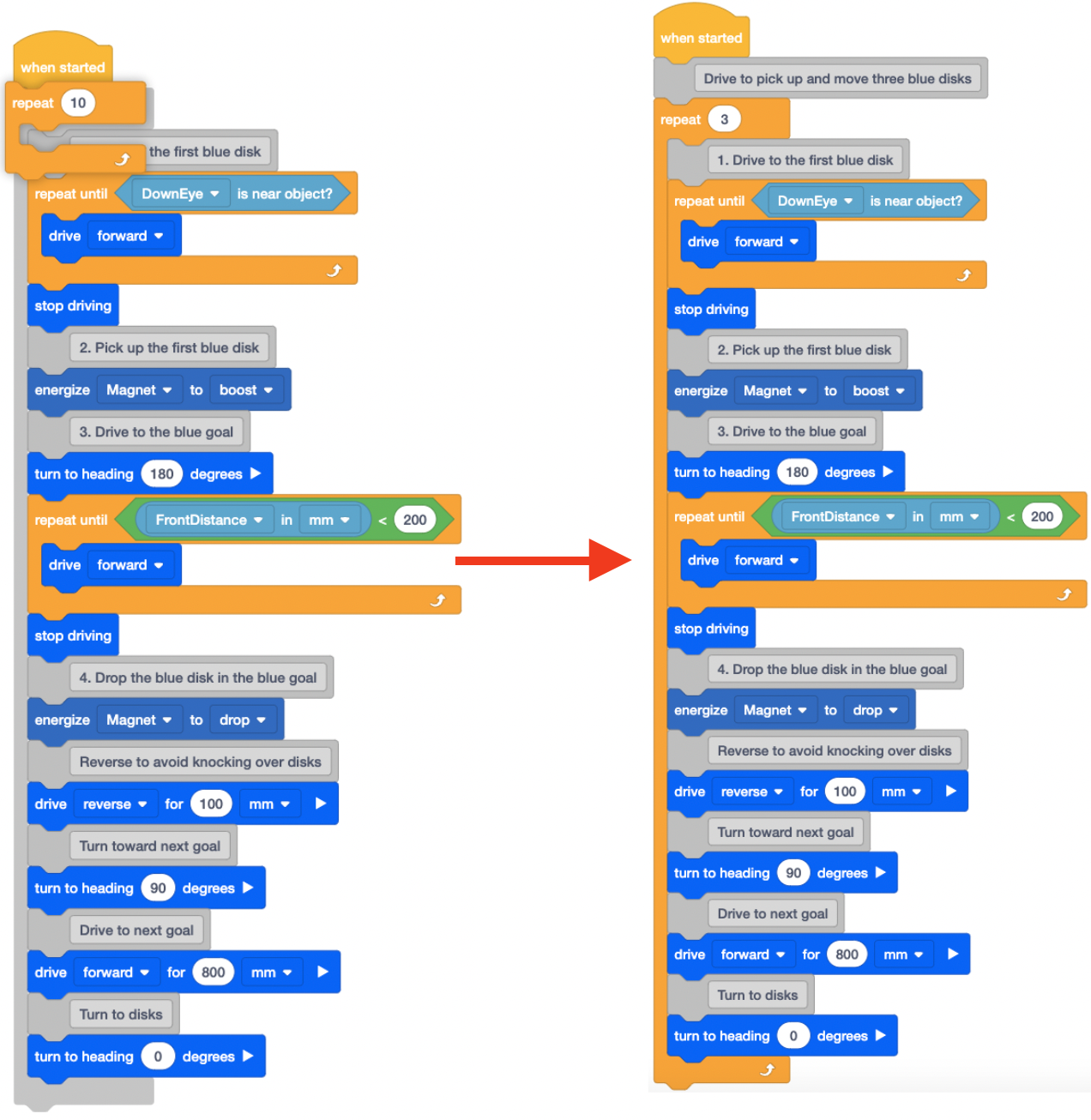
Untuk mengulang perilaku beberapa kali, blok [Ulangi] dapat digunakan.

-
Tambahkan blok [Ulangi] ke kode dan atur parameter ke '3.'
- Buka Disk Mover Playground dan jalankan proyeknya.
-
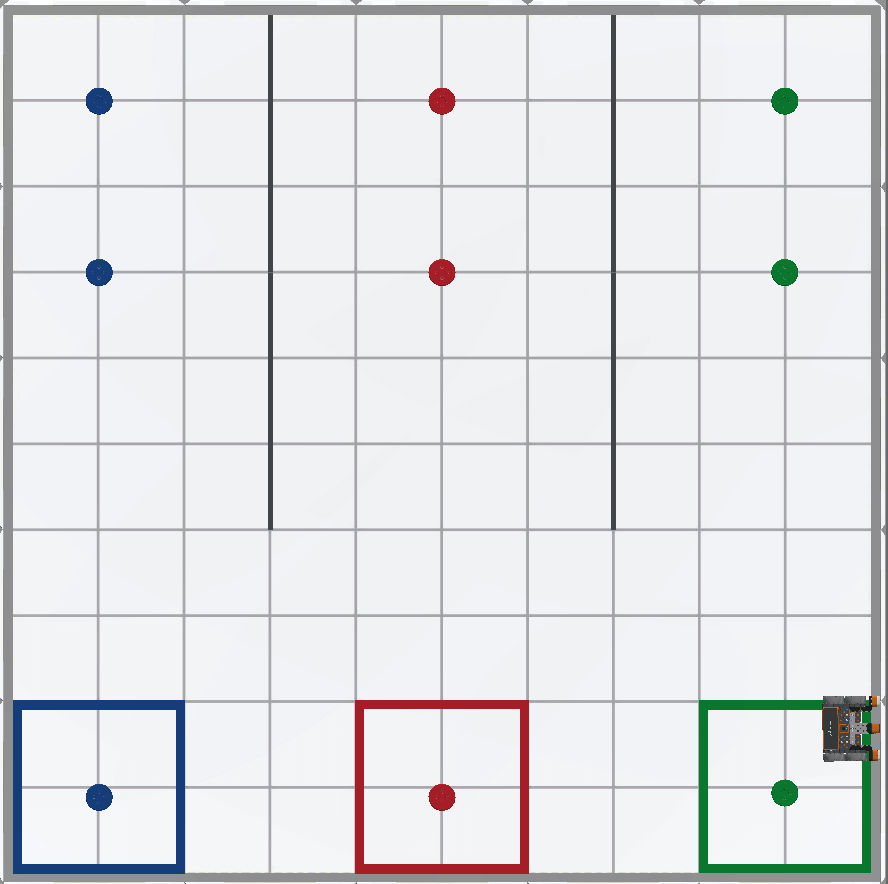
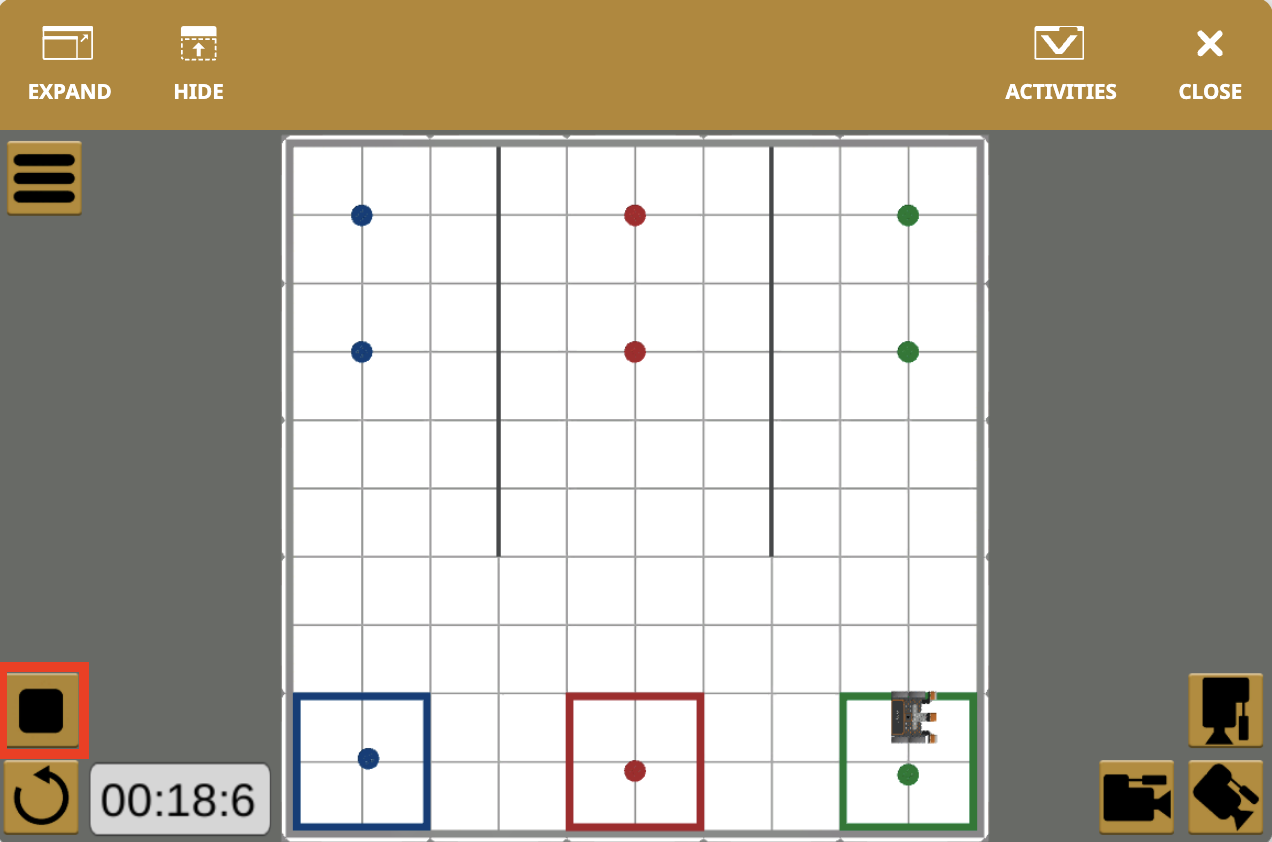
Saat proyek ini dijalankan, Robot VR mengambil dan menjatuhkan satu cakram dari setiap warna ke sasaran berwarna yang sesuai.
-
Perhatikan bahwa Robot VR terus menabrak dinding. Perilaku ini diharapkan karena proyek menginstruksikan Robot VR untuk berbelok ke kanan dan melaju menuju tujuan berikutnya, tiga kali. Pertama kali adalah berkendara dari biru ke merah. Yang kedua dari merah ke hijau, dan yang ketiga dari hijau ke tembok, karena tidak ada gawang berwarna lainnya. Hentikan proyek setelah Robot VR menabrak tembok. Proyek ini dapat ditingkatkan sehingga Robot VR berhenti setelah mengambil dan menggerakkan cakram hijau, tetapi hal ini akan meningkatkan kompleksitas proyek secara keseluruhan.
Untuk Informasi Anda
Menempatkan satu loop di dalam loop lain disebut nesting. Saat Anda membuat loop “bersarang”, loop luar mengendalikan berapa kali loop dalam dieksekusi. Ada banyak jenis loop berbeda yang dapat disarangkan. Misalnya, pada kode sebelumnya di atas, blok [Repeat until] bersarang di dalam blok [Repeat].
Blok [Ulangi] juga dapat disarangkan di dalam blok [Ulangi] lainnya. Dalam contoh berikut, karena blok [Ulangi] luar diatur ke '3,' Robot VR akan menggambar tiga kotak di Taman Bermain.

Loop bersarang berguna dalam proyek di mana Robot VR mengulang perilaku yang sama lebih dari satu kali. Loop bersarang mengatur dan memadatkan suatu proyek. Hal ini dapat membantu untuk lebih memahami konteks dan tujuan kode, serta mempermudah menemukan kesalahan.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.