
Lezione 4: Spostare un disco rosso e verde
-
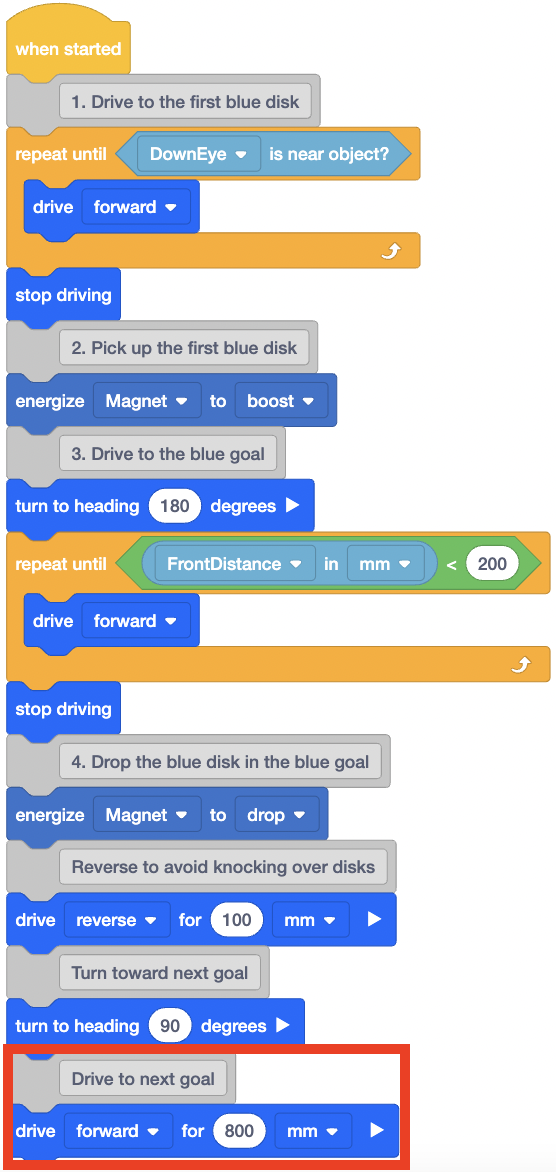
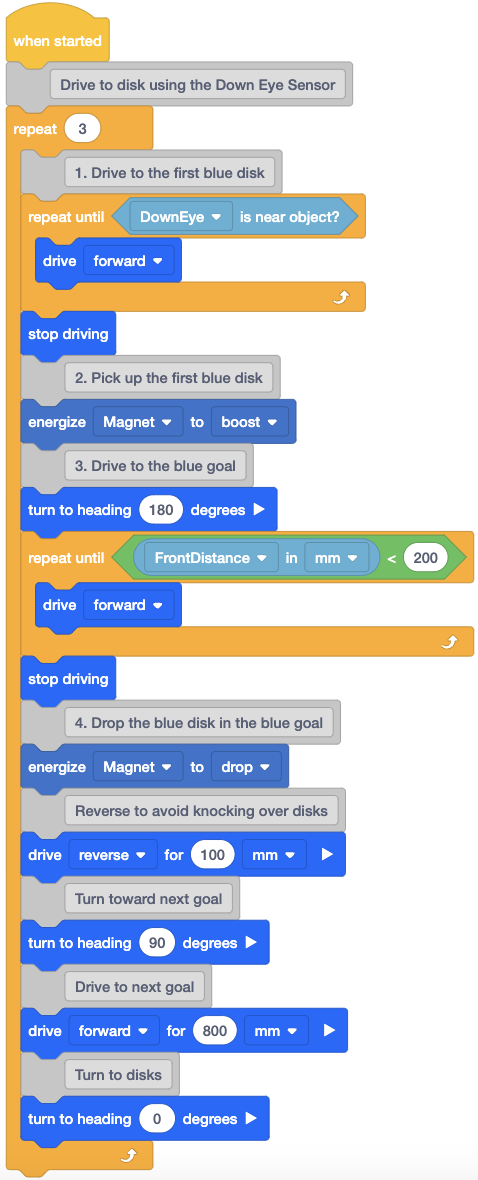
Successivamente, il robot VR dovrà avanzare verso il prossimo obiettivo colorato. Si noti che il robot VR dovrà avanzare di quattro quadrati della griglia o 800 millimetri (mm) per raggiungere il centro del prossimo obiettivo colorato.

-
Aggiungere un blocco [Drive for] al codice e impostare il parametro su 800 millimetri (mm).
-
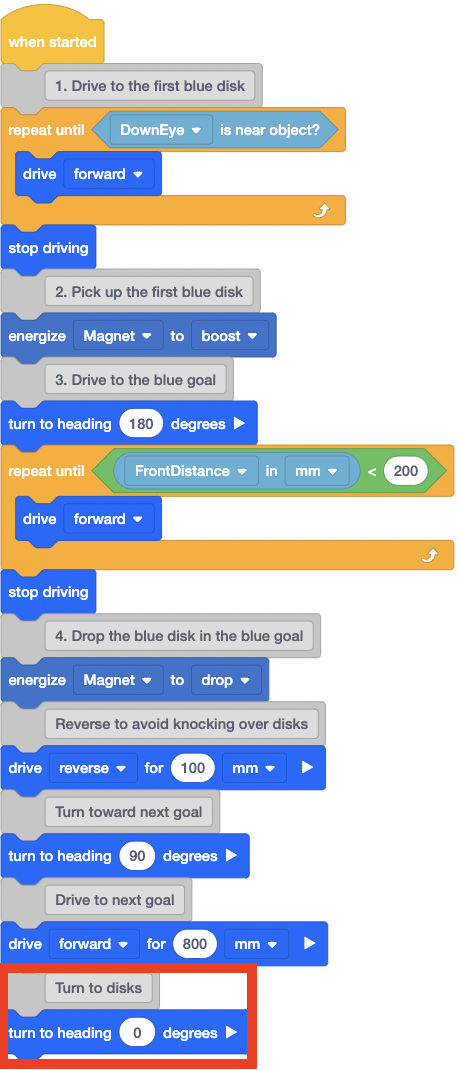
Il robot VR dovrà ora ruotare per affrontare i dischi colorati.

-
Aggiungere un secondo blocco [Turn to heading] al codice e impostare il parametro a zero gradi. Questo ruoterà il robot VR verso i dischi colorati.
- Aprire il Disk Mover Playground ed eseguire il progetto.
-
Il robot VR raccoglierà e sposterà il primo disco blu nell'obiettivo blu, quindi supererà l'obiettivo rosso. Il robot VR si girerà anche verso i dischi rossi.

-
Ora che il robot VR è rivolto verso i dischi rossi, il robot VR dovrà ripetere gli stessi comportamenti utilizzati per raccogliere il disco blu, al fine di raccogliere e spostare il disco rosso. I comportamenti di guida in avanti per prendere il disco, girarsi e tornare allo stesso obiettivo colorato per lasciare il disco.

-
Una volta spostato il primo disco rosso, il robot VR dovrà quindi guidare verso l'obiettivo verde ed eseguire le stesse azioni utilizzate per spostare il disco blu e rosso, per spostare il primo disco verde.

-
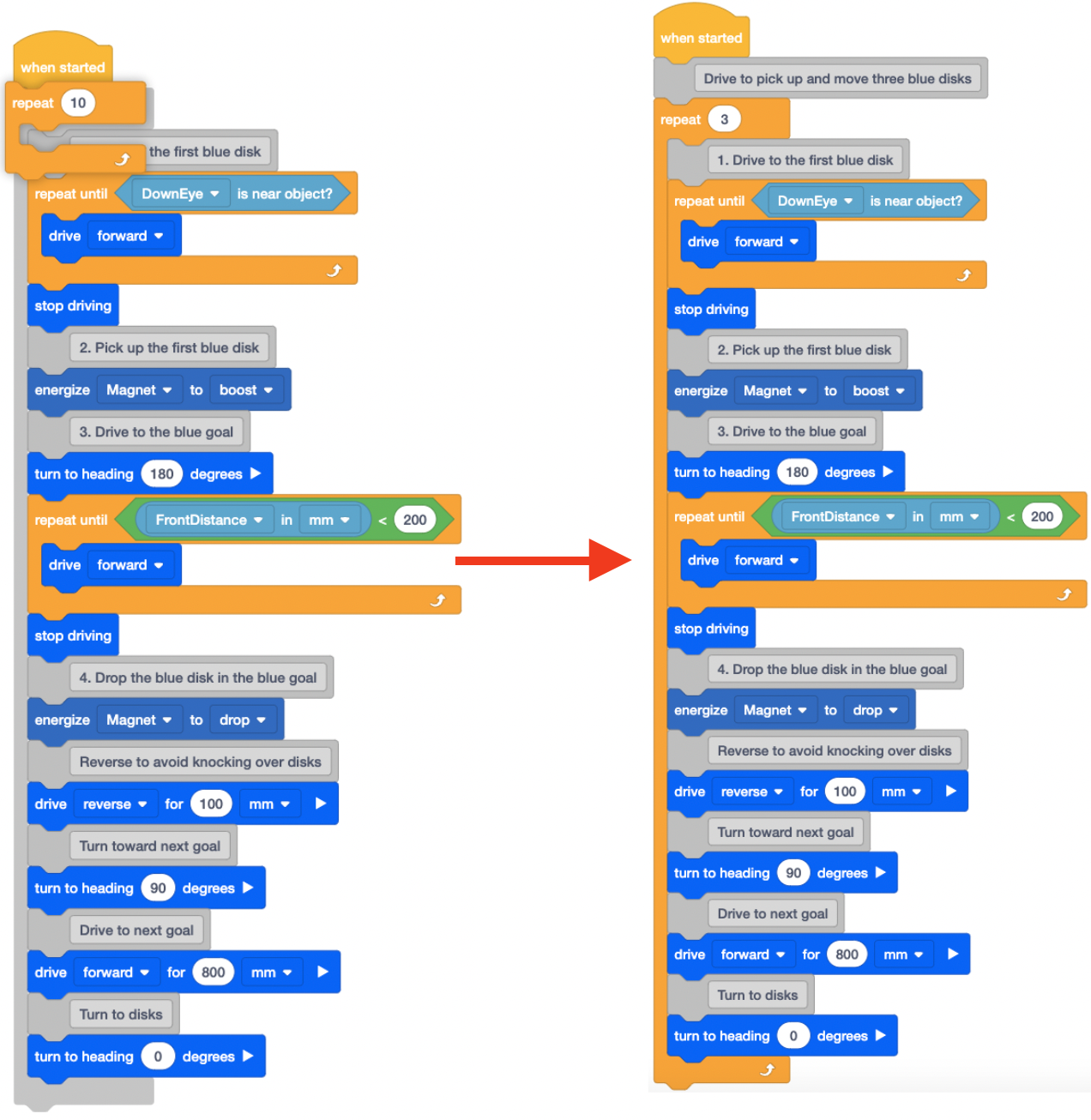
Per ripetere i comportamenti più volte, è possibile utilizzare un blocco [Ripeti].

-
Aggiungere un blocco [Repeat] al codice e impostare il parametro su ‘3’.
- Aprire il Disk Mover Playground ed eseguire il progetto.
-
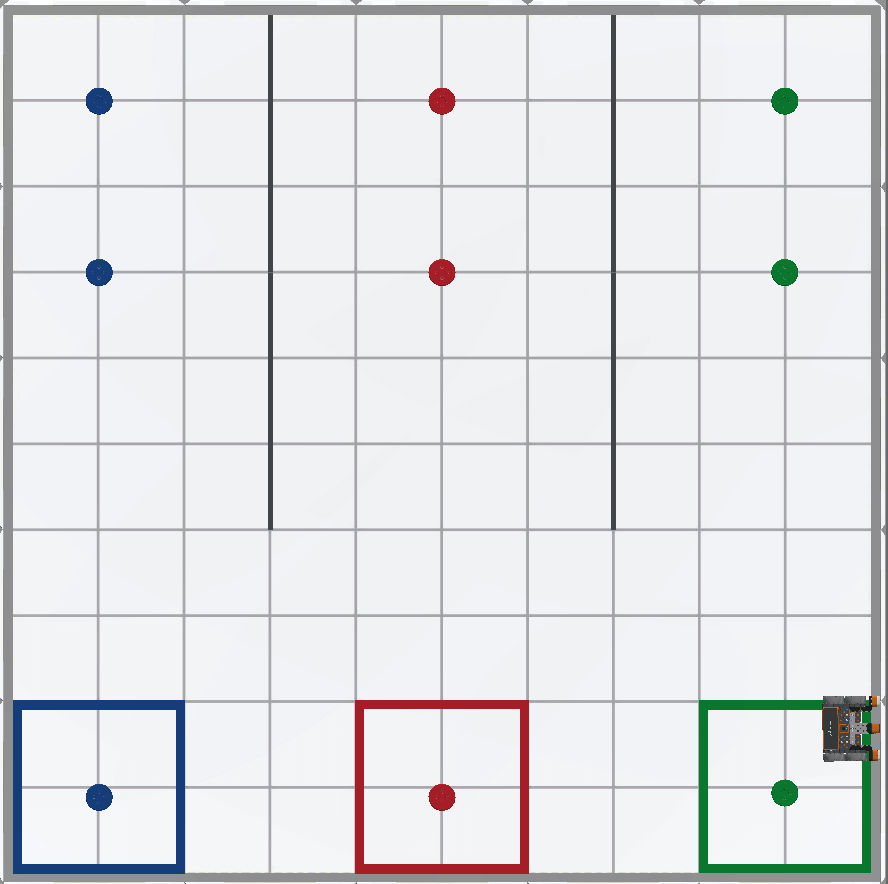
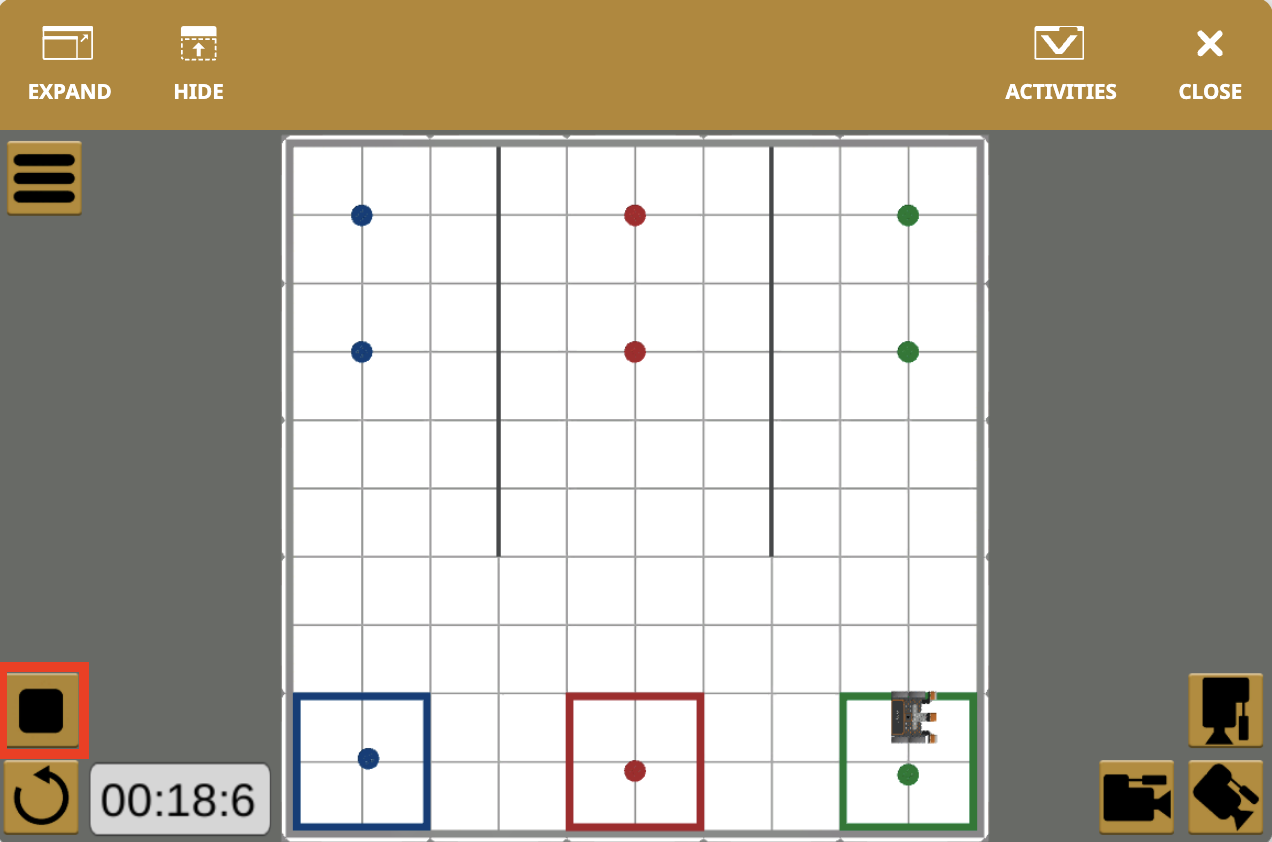
Quando questo progetto viene eseguito, il robot VR raccoglie e rilascia un disco di ciascun colore nel suo obiettivo colorato corrispondente.
-
Si noti che il robot VR ha continuato a guidare contro il muro. Questo comportamento è previsto poiché il progetto ha incaricato il robot VR di girare a destra e guidare verso l'obiettivo successivo, per tre volte. La prima volta è guidare dal blu al rosso. Il secondo è dal rosso al verde, e il terzo è dal verde al muro, poiché non c'è un altro obiettivo colorato. Interrompi il progetto una volta che il robot VR colpisce il muro. Il progetto potrebbe essere migliorato in modo che il robot VR si fermi dopo aver raccolto e spostato il disco verde, ma ciò aumenterebbe la complessità complessiva del progetto.
Per tua informazione
Il posizionamento di un'ansa all'interno di un'altra ansa è chiamato annidamento. Quando si "nidificano" i cicli, il ciclo esterno controlla il numero di volte in cui viene eseguito il ciclo interno. Esistono molti tipi diversi di loop che possono essere annidati. Ad esempio, nel codice precedente, i blocchi [Repeat until] sono nidificati all'interno di un blocco [Repeat].
Un blocco [Repeat] può anche essere annidato all'interno di un altro blocco [Repeat]. Nell'esempio seguente, poiché il blocco esterno [Repeat] è impostato su "3", il robot VR disegnerà tre quadrati sul parco giochi.

I loop nidificati sono utili nei progetti in cui un robot VR ripete gli stessi comportamenti più di una volta. Nesting Loops organizza e condensa un progetto. Questo può essere utile per comprendere meglio il contesto e lo scopo del codice, oltre a facilitare la ricerca di errori.
Selezionare il pulsante Avanti per continuare con il resto della lezione.