
পাঠ ৪: একটি লাল এবং সবুজ ডিস্ক সরান
-
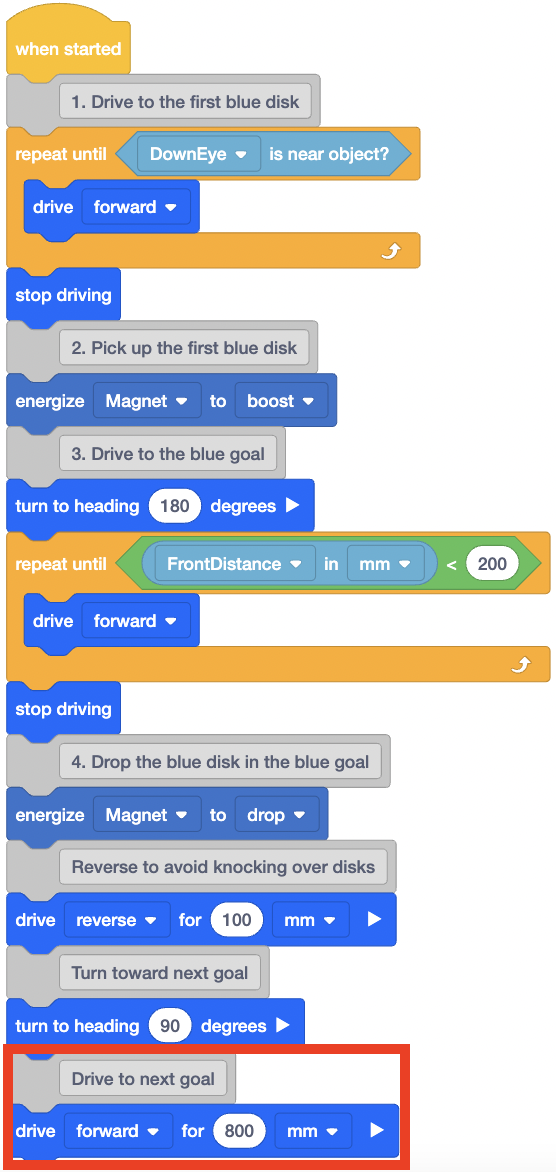
এর পরে, ভিআর রোবটকে পরবর্তী রঙিন লক্ষ্যে এগিয়ে যেতে হবে। মনে রাখবেন যে VR রোবটকে পরবর্তী রঙিন লক্ষ্যের কেন্দ্রে যাওয়ার জন্য চারটি গ্রিড স্কোয়ার বা 800 মিলিমিটার (মিমি) এগিয়ে যেতে হবে।

-
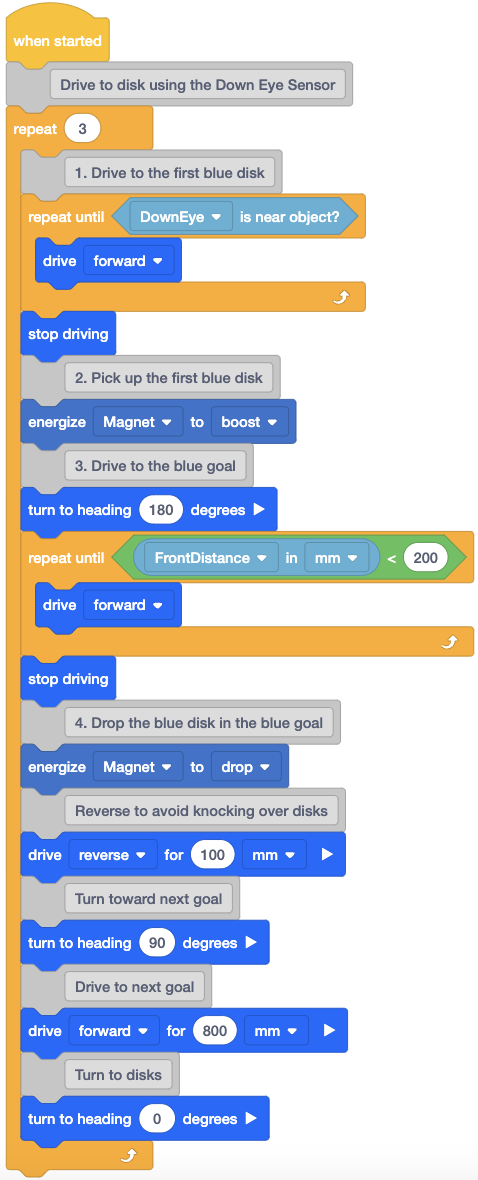
কোডে একটি [এর জন্য ড্রাইভ] ব্লক যোগ করুন এবং প্যারামিটারটি 800 মিলিমিটার (মিমি) সেট করুন।
-
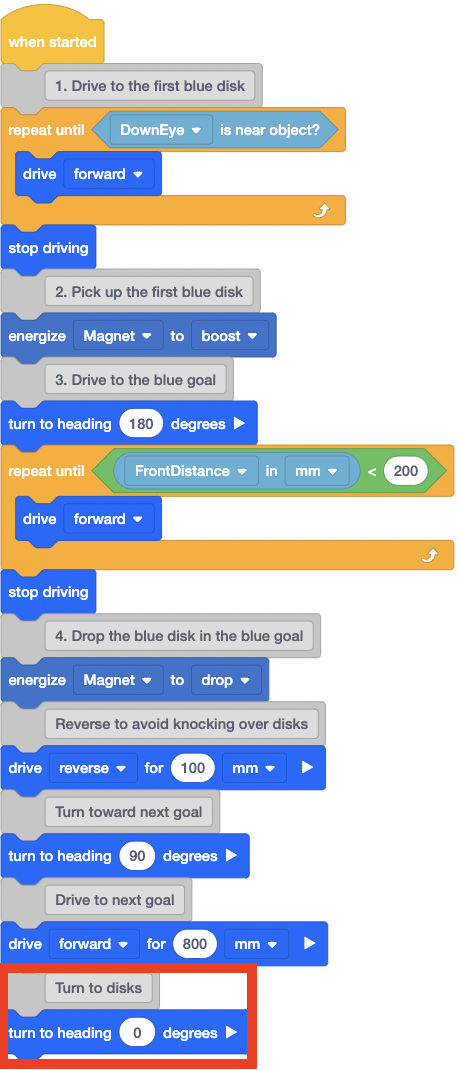
ভিআর রোবটটিকে এখন রঙিন ডিস্কের মুখোমুখি হতে হবে।

-
কোডটিতে একটি দ্বিতীয় [শিরোনামের দিকে ঘুরুন] ব্লক যোগ করুন এবং প্যারামিটারটিকে শূন্য ডিগ্রিতে সেট করুন। এটি ভিআর রোবটটিকে রঙিন ডিস্কের মুখোমুখি করবে।
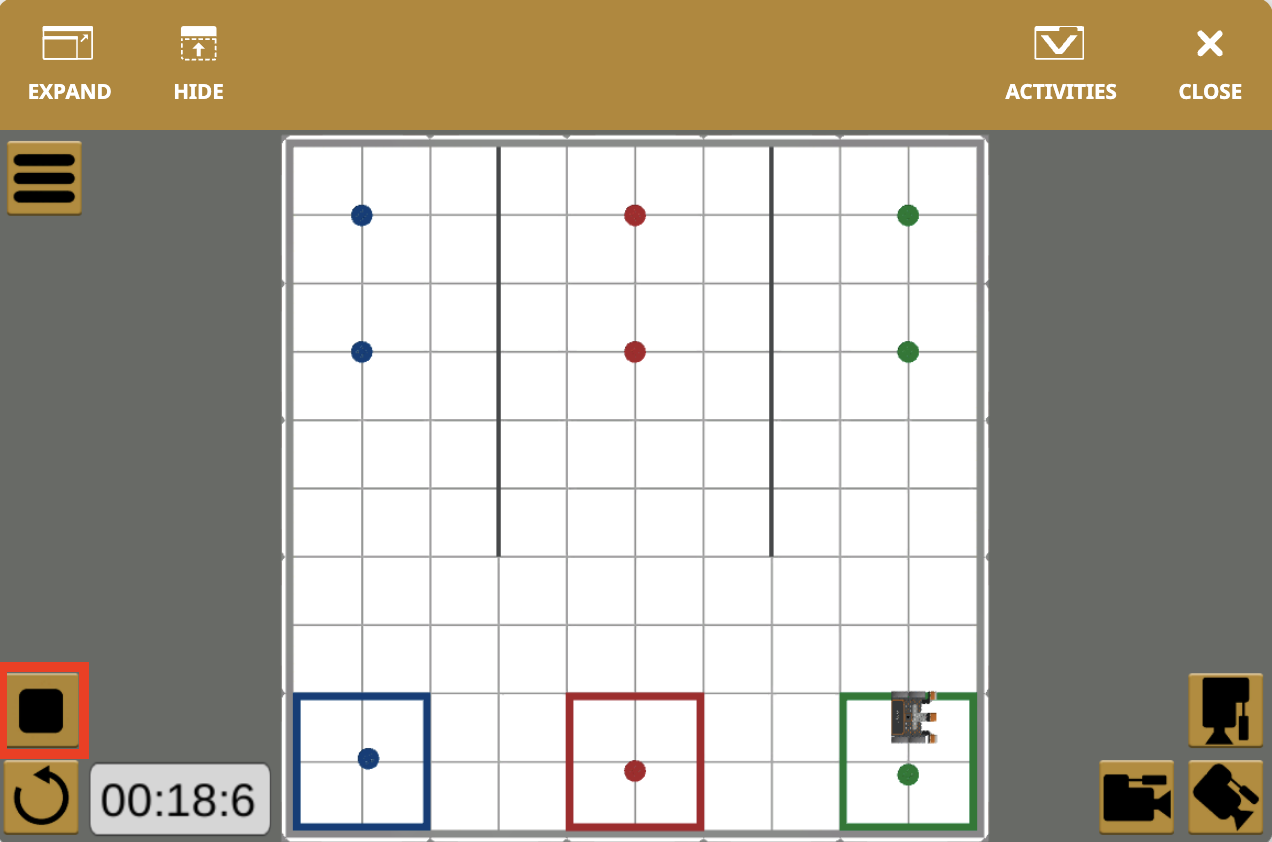
- ডিস্ক মুভার প্লেগ্রাউন্ড খুলুন এবং প্রকল্পটি চালান।
-
ভিআর রোবট প্রথম নীল ডিস্কটিকে নীল গোলে নিয়ে যাবে এবং তারপর লাল গোলের উপর দিয়ে গাড়ি চালাবে। VR রোবটও লাল ডিস্কের মুখোমুখি হবে।

-
এখন যেহেতু VR রোবট লাল ডিস্কের মুখোমুখি হচ্ছে, VR রোবটকে সেই একই আচরণের পুনরাবৃত্তি করতে হবে যা নীল ডিস্ক সংগ্রহ করতে ব্যবহৃত হয়েছিল, যাতে লাল ডিস্কটি তোলা এবং সরানোর জন্য। ডিস্কটি তুলে নেওয়ার জন্য, ঘুরে দাঁড়ানোর জন্য এবং ডিস্কটি ফেলে দেওয়ার জন্য একই রঙের লক্ষ্যে ফিরে যাওয়ার জন্য গাড়ি চালানোর আচরণগুলি।

-
একবার প্রথম লাল ডিস্কটি সরানো হলে, VR রোবটটিকে সবুজ লক্ষ্যে ড্রাইভ করতে হবে এবং নীল এবং লাল ডিস্কটি সরানোর জন্য, প্রথম সবুজ ডিস্কটি সরানোর জন্য একই অ্যাকশনগুলি সম্পাদন করতে হবে।

-
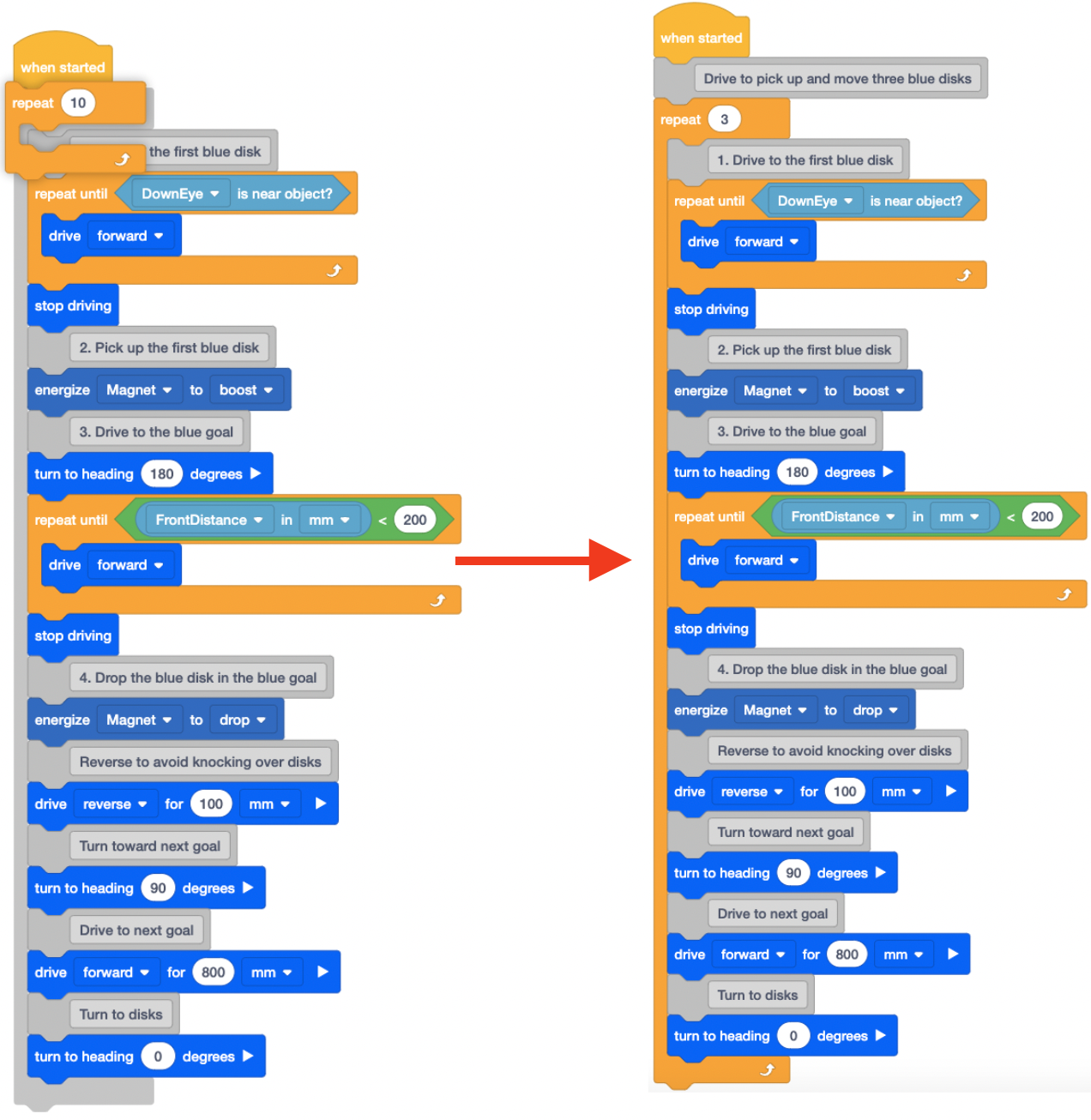
আচরণগুলি একাধিকবার পুনরাবৃত্তি করার জন্য, একটি [পুনরাবৃত্তি] ব্লক ব্যবহার করা যেতে পারে।

-
কোডে একটি [পুনরাবৃত্তি] ব্লক যোগ করুন এবং প্যারামিটারটিকে '3'-তে সেট করুন।
- ডিস্ক মুভার প্লেগ্রাউন্ড খুলুন এবং প্রকল্পটি চালান।
-
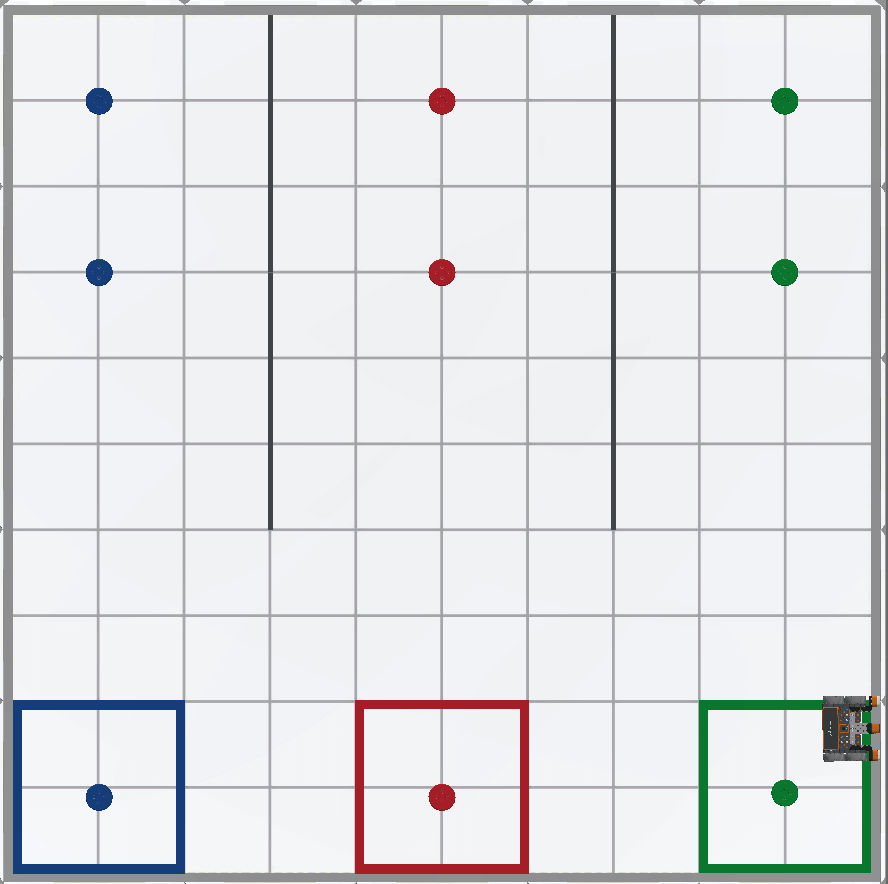
যখন এই প্রকল্পটি চালানো হয়, VR রোবট প্রতিটি রঙের একটি ডিস্ককে তার সংশ্লিষ্ট রঙিন লক্ষ্যে তুলে নেয় এবং ফেলে দেয়।
-
উল্লেখ্য যে ভিআর রোবটটি দেয়ালে ড্রাইভ করতে থাকে। এই আচরণটি প্রত্যাশিত কারণ প্রকল্পটি VR রোবটকে ডানদিকে ঘুরতে এবং পরবর্তী লক্ষ্যের দিকে তিনবার গাড়ি চালানোর নির্দেশ দিয়েছে। প্রথমবার নীল থেকে লালে গাড়ি চালাচ্ছে। দ্বিতীয়টি লাল থেকে সবুজ, এবং তৃতীয়টি সবুজ থেকে দেয়ালে, যেহেতু অন্য রঙিন গোল নেই৷ VR রোবট দেয়ালে আঘাত করলে প্রকল্পটি বন্ধ করুন। প্রকল্পটি উন্নত করা যেতে পারে যাতে ভিআর রোবটটি গ্রিন ডিস্কটি তোলার পরে থেমে যায়, তবে এটি প্রকল্পের সামগ্রিক জটিলতাকে বাড়িয়ে তুলবে।
আপনার তথ্যের জন্য
একটি লুপ অন্য লুপের ভিতরে স্থাপন করাকে নেস্টিং বলে। আপনি যখন "নেস্ট" লুপ করেন, তখন বাইরের লুপটি ভিতরের লুপটি কতবার কার্যকর করে তা নিয়ন্ত্রণ করে। বিভিন্ন ধরণের লুপ রয়েছে যা নেস্ট করা যেতে পারে। উদাহরণস্বরূপ, উপরের পূর্ববর্তী কোডে, [পুনরাবৃত্তি] ব্লকগুলি একটি [পুনরাবৃত্ত] ব্লকের ভিতরে নেস্ট করা না হওয়া পর্যন্ত।
একটি [পুনরাবৃত্ত] ব্লক অন্য [পুনরাবৃত্তি] ব্লকের ভিতরেও নেস্ট করা যেতে পারে। নিম্নলিখিত উদাহরণে, যেহেতু বাইরের [পুনরাবৃত্তি] ব্লকটি '3' তে সেট করা হয়েছে, তাই VR রোবট খেলার মাঠে তিনটি স্কোয়ার আঁকবে।

নেস্টেড লুপগুলি এমন প্রকল্পগুলিতে সহায়ক যেখানে একটি ভিআর রোবট একই আচরণ একাধিকবার পুনরাবৃত্তি করে। নেস্টিং লুপগুলি একটি প্রকল্পকে সংগঠিত করে এবং ঘনীভূত করে। এটি কোডের প্রেক্ষাপট এবং উদ্দেশ্য আরও ভালভাবে বোঝার পাশাপাশি ত্রুটিগুলি খুঁজে পাওয়া সহজ করে তুলতে সহায়ক হতে পারে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।