
Leçon 4 : Déplacer un disque rouge et vert
-
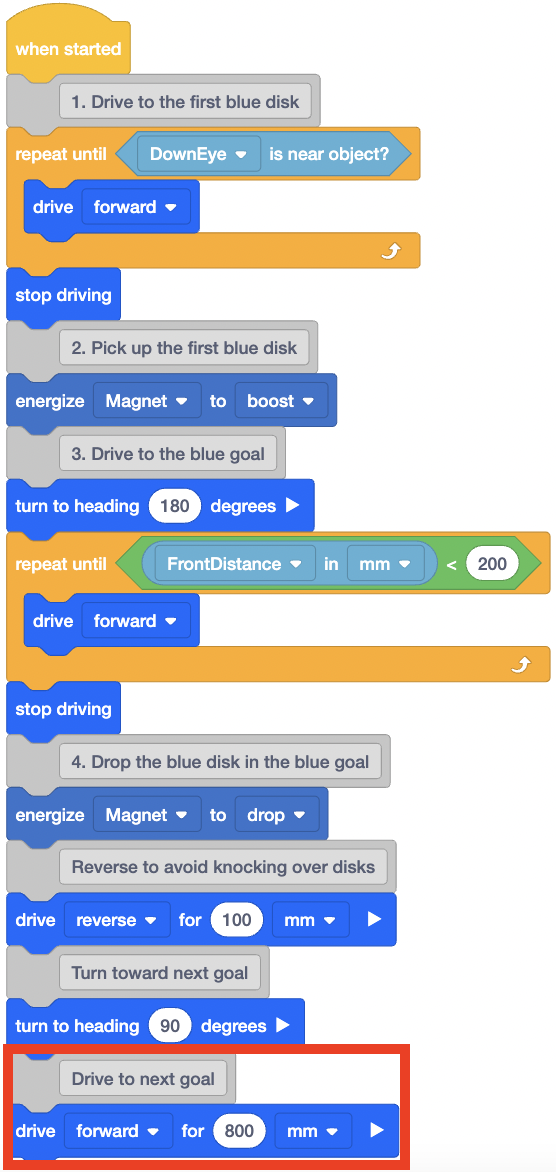
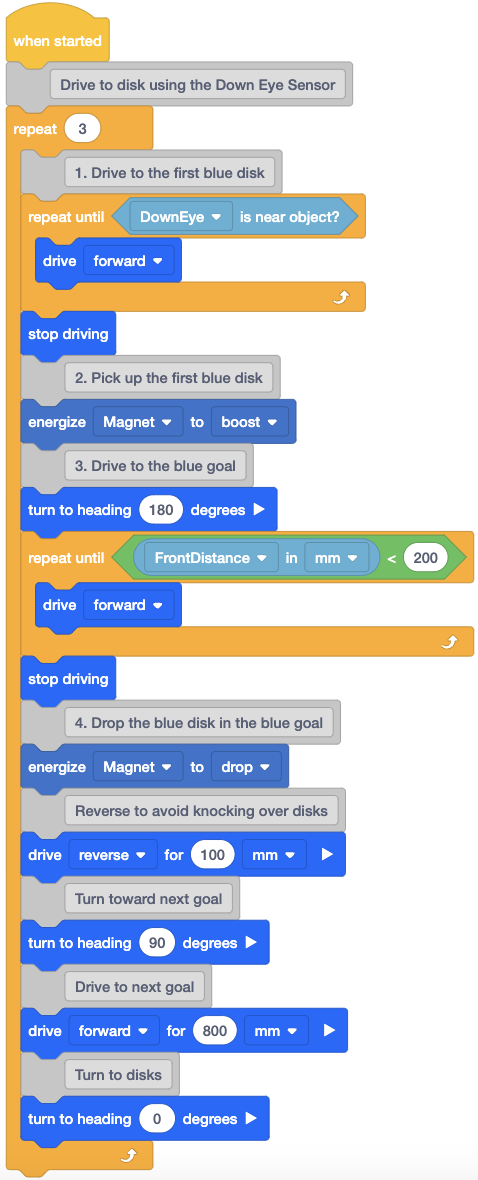
Ensuite, le robot VR devra avancer vers le prochain objectif coloré. Notez que le robot VR devra faire avancer quatre carrés de grille, soit 800 millimètres (mm) afin de se rendre au centre du prochain objectif coloré.

-
Ajoutez un bloc [Drive for] au code et définissez le paramètre sur 800 millimètres (mm).
-
Le robot VR devra maintenant tourner pour faire face aux disques colorés.

-
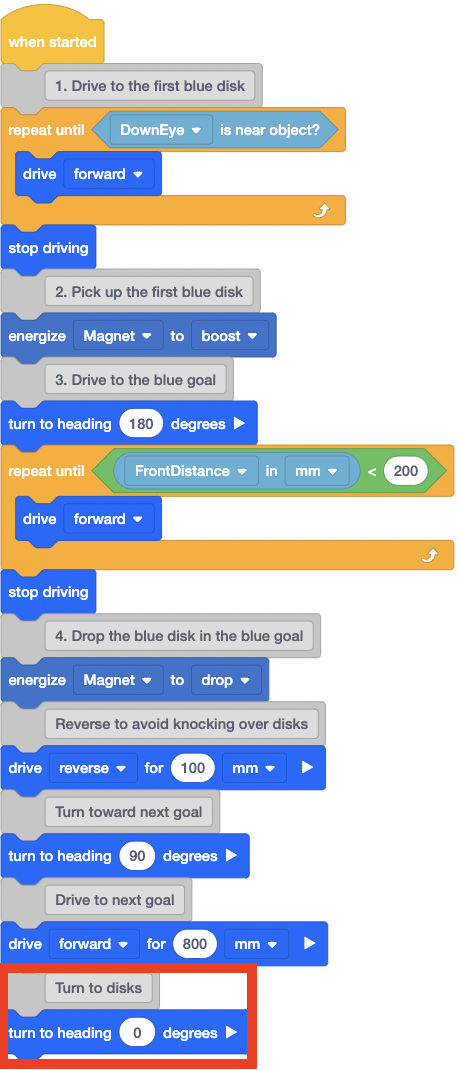
Ajoutez un second bloc [Turn to heading] au code et définissez le paramètre sur zéro degré. Cela fera tourner le robot VR pour faire face aux disques colorés.
- Ouvrez le Disk Mover Playground et exécutez le projet.
-
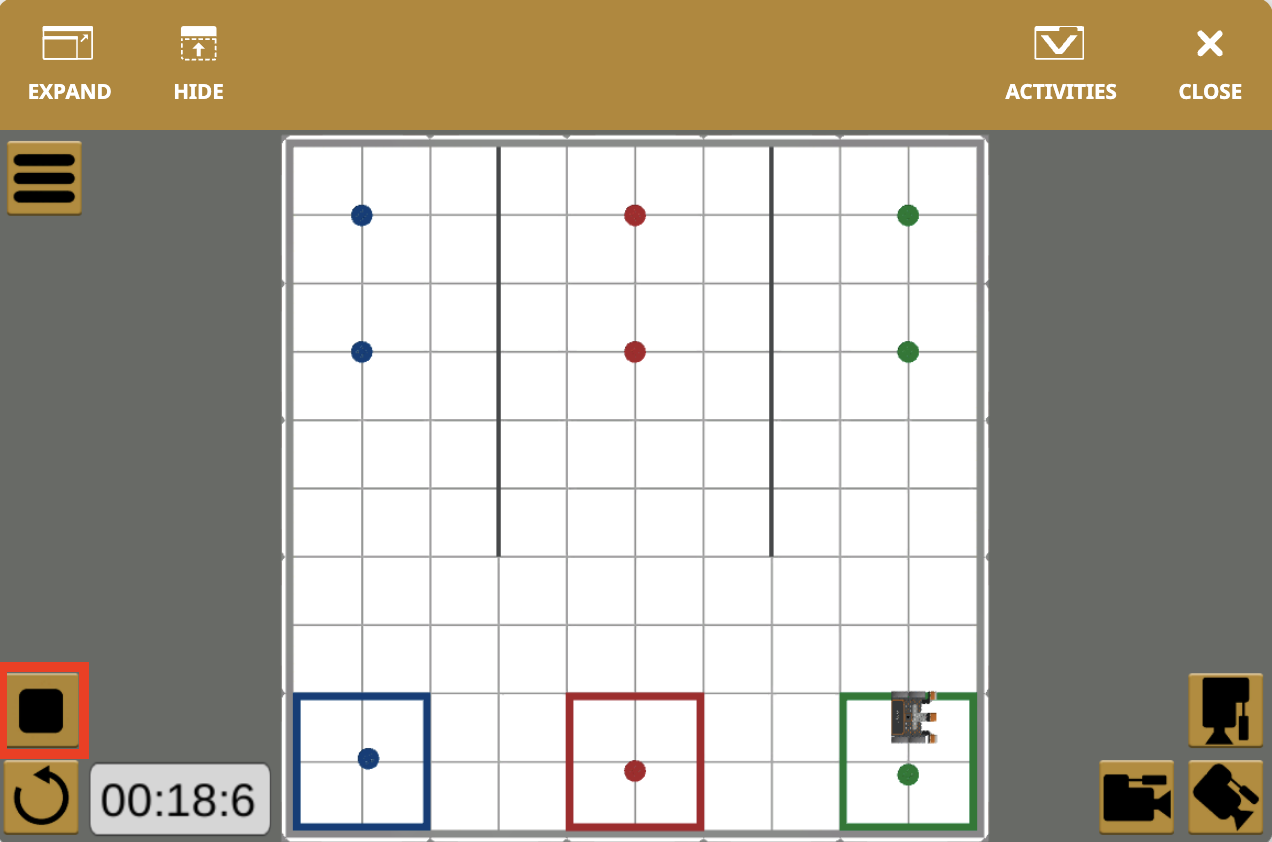
Le robot VR va ramasser et déplacer le premier disque bleu dans le but bleu, puis rouler sur le but rouge. Le robot VR se tournera également pour faire face aux disques rouges.

-
Maintenant que le robot VR fait face aux disques rouges, le robot VR devra répéter les mêmes comportements que ceux utilisés pour collecter le disque bleu, afin de ramasser et de déplacer le disque rouge. Comportements consistant à avancer pour ramasser le disque, à faire demi-tour et à revenir au même objectif coloré pour déposer le disque.

-
Une fois le premier disque rouge déplacé, le robot VR devra alors se diriger vers l'objectif vert et effectuer les mêmes actions que celles utilisées pour déplacer le disque bleu et le disque rouge, pour déplacer le premier disque vert.

-
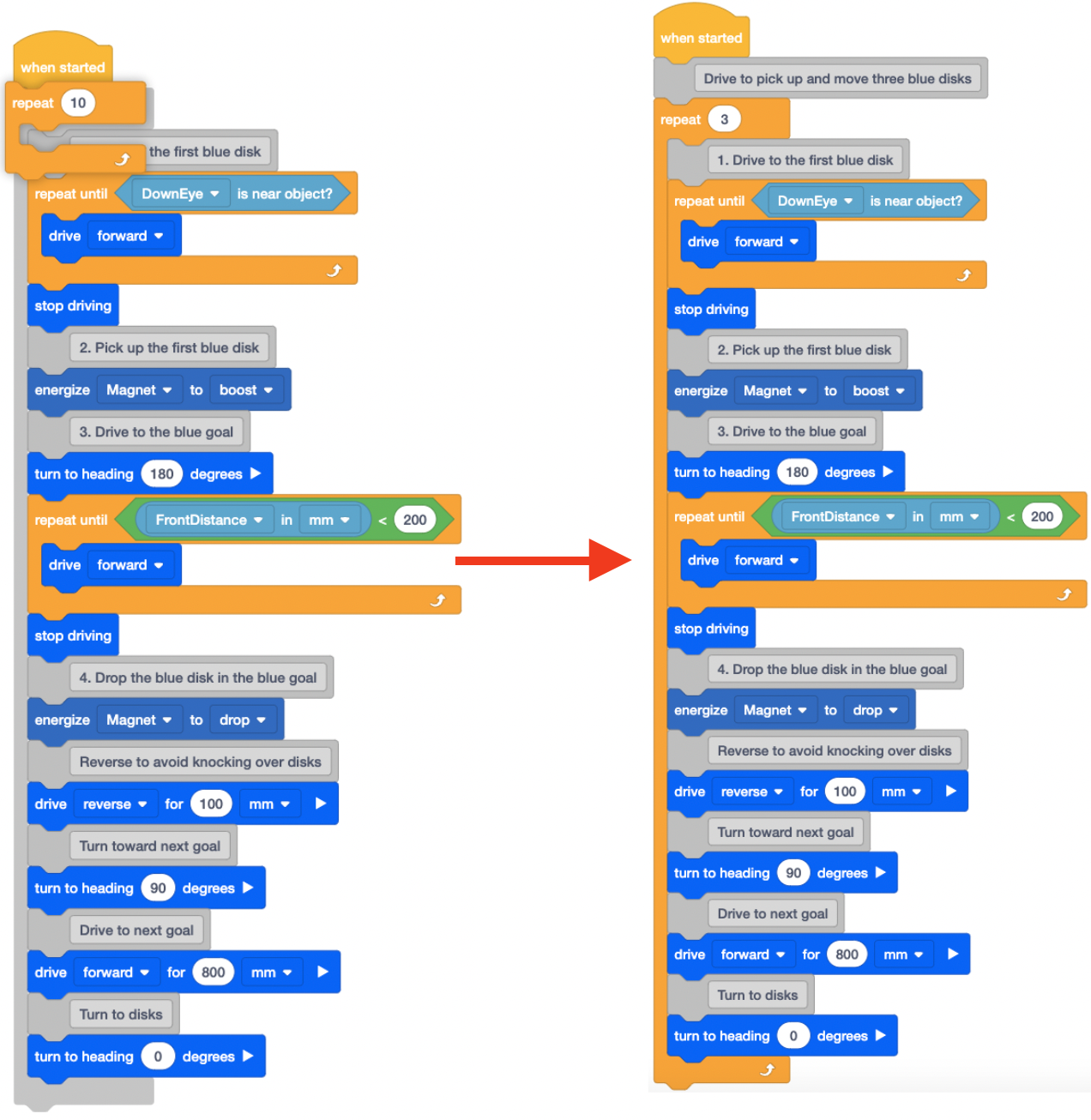
Afin de répéter les comportements plusieurs fois, un bloc [Répéter] peut être utilisé.

-
Ajoutez un bloc [Repeat] au code et définissez le paramètre sur ‘3’.
- Ouvrez le Disk Mover Playground et exécutez le projet.
-
Lorsque ce projet est exécuté, le robot VR ramasse et dépose un disque de chaque couleur dans son objectif coloré correspondant.
-
Notez que le robot VR a continué à s'enfoncer dans le mur. Ce comportement est attendu puisque le projet a demandé au robot VR de tourner à droite et de se diriger vers le prochain objectif, trois fois. La première fois, vous passez du bleu au rouge. Le deuxième va du rouge au vert, et le troisième va du vert au mur, car il n'y a pas d'autre objectif coloré. Arrêtez le projet une fois que le robot VR a heurté le mur. Le projet pourrait être amélioré de sorte que le robot VR s'arrête après avoir ramassé et déplacé le disque vert, mais cela augmenterait la complexité globale du projet.
Pour votre information
Placer une boucle à l'intérieur d'une autre boucle est appelé imbrication. Lorsque vous « emboîtez » des boucles, la boucle externe contrôle le nombre de fois que la boucle interne s'exécute. Il existe de nombreux types de boucles qui peuvent être imbriquées. Par exemple, dans le code précédent ci-dessus, les blocs [Repeat until] sont imbriqués à l'intérieur d'un bloc [Repeat].
Un bloc [Répéter] peut également être imbriqué dans un autre bloc [Répéter]. Dans l'exemple suivant, étant donné que le bloc externe [Répéter] est réglé sur « 3 », le robot VR dessine trois cases sur le terrain de jeu.

Les boucles imbriquées sont utiles dans les projets où un robot VR répète les mêmes comportements plus d'une fois. Nesting Loops organise et condense un projet. Cela peut être utile pour mieux comprendre le contexte et l'objectif du code, ainsi que pour faciliter la recherche des erreurs.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.