
പാഠം 4: ഒരു ചുവപ്പും പച്ചയും ഡിസ്ക് നീക്കുക
-
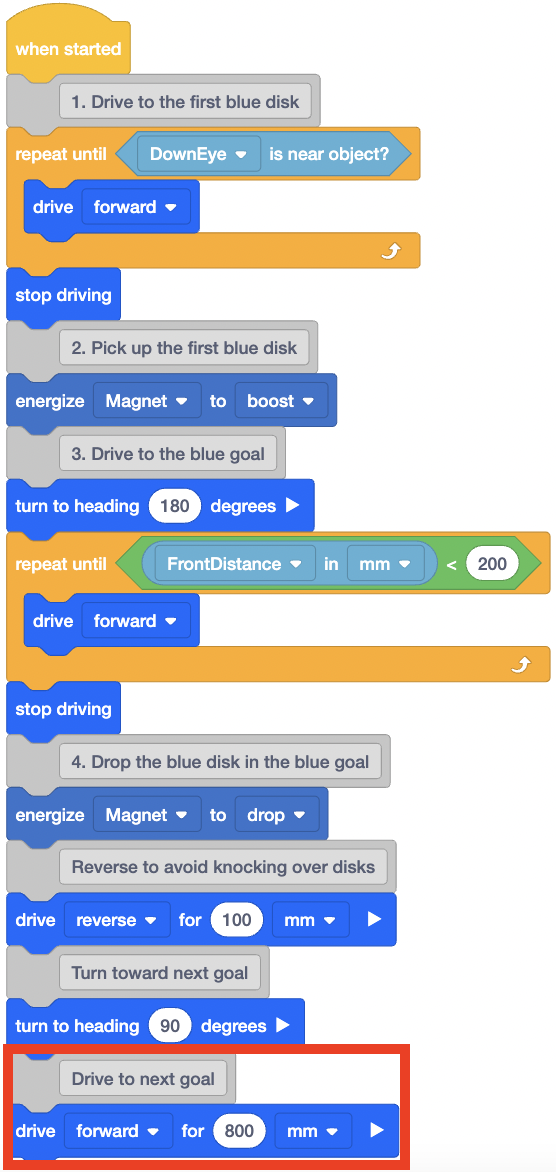
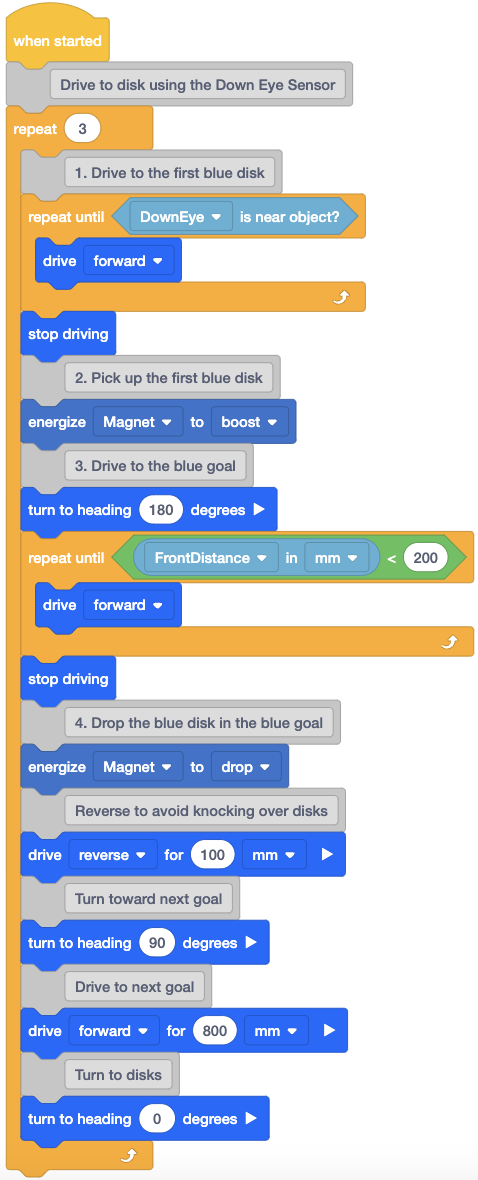
അടുത്തതായി, വിആർ റോബോട്ട് അടുത്ത നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് മുന്നോട്ട് പോകേണ്ടതുണ്ട്. അടുത്ത നിറമുള്ള ഗോളിന്റെ മധ്യഭാഗത്തേക്ക് പോകുന്നതിന് VR റോബോട്ട് നാല് ഗ്രിഡ് സ്ക്വയറുകൾ അല്ലെങ്കിൽ 800 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ട് ഓടിക്കേണ്ടിവരുമെന്ന് ശ്രദ്ധിക്കുക.

-
കോഡിലേക്ക് ഒരു [Drive for] ബ്ലോക്ക് ചേർത്ത് പാരാമീറ്റർ 800 മില്ലിമീറ്ററായി (mm) സജ്ജമാക്കുക.
-
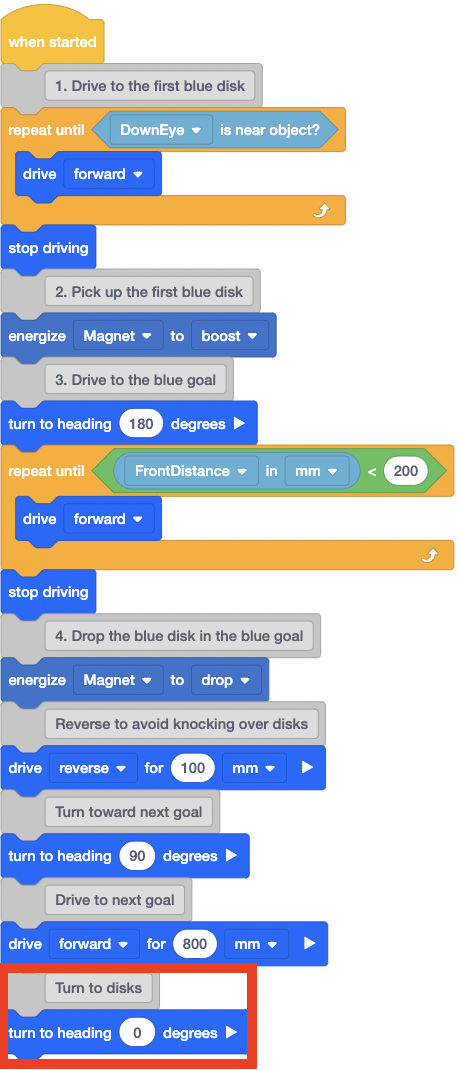
ഇനി VR റോബോട്ട് നിറമുള്ള ഡിസ്കുകൾക്ക് അഭിമുഖമായി തിരിയേണ്ടതുണ്ട്.

-
കോഡിലേക്ക് ഒരു രണ്ടാമത്തെ [തലക്കെട്ടിലേക്ക് തിരിയുക] ബ്ലോക്ക് ചേർത്ത് പാരാമീറ്റർ പൂജ്യം ഡിഗ്രിയിലേക്ക് സജ്ജമാക്കുക. ഇത് VR റോബോട്ടിനെ നിറമുള്ള ഡിസ്കുകൾക്ക് അഭിമുഖമായി തിരിക്കും.
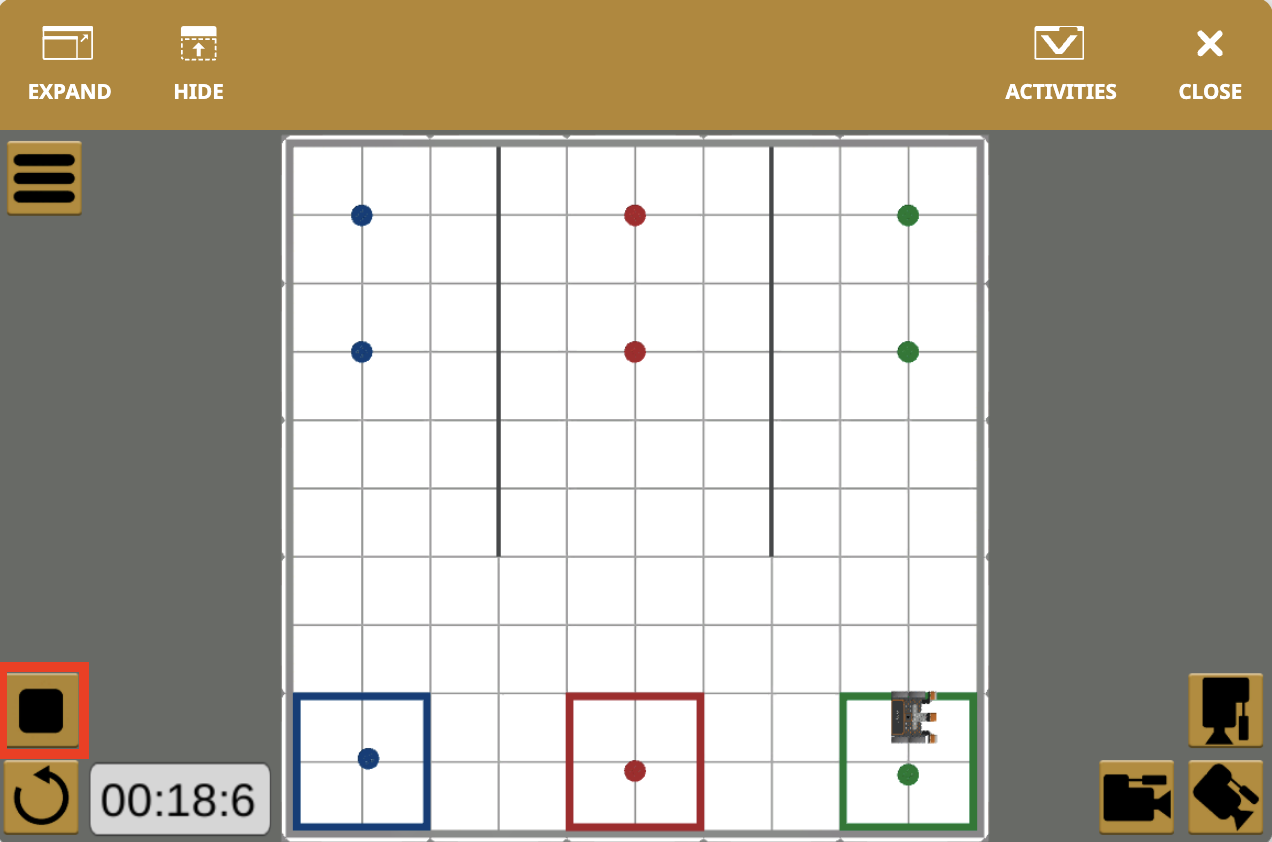
- ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുത്ത് നീല ഗോളിലേക്ക് നീക്കും, തുടർന്ന് ചുവന്ന ഗോളിന് മുകളിലൂടെ ഓടിച്ചു പോകും. വിആർ റോബോട്ടും ചുവന്ന ഡിസ്കുകൾക്ക് അഭിമുഖമായി തിരിക്കും.

-
ഇപ്പോൾ VR റോബോട്ട് ചുവന്ന ഡിസ്കുകളെ അഭിമുഖീകരിക്കുന്നതിനാൽ, ചുവന്ന ഡിസ്ക് എടുത്ത് നീക്കുന്നതിന്, നീല ഡിസ്ക് ശേഖരിക്കാൻ ഉപയോഗിച്ച അതേ പെരുമാറ്റങ്ങൾ VR റോബോട്ടിന് ആവർത്തിക്കേണ്ടതുണ്ട്. ഡിസ്ക് എടുക്കാൻ മുന്നോട്ട് ഓടിക്കുന്നതും, തിരിഞ്ഞു നോക്കുന്നതും, ഡിസ്കിൽ നിന്ന് ഇറങ്ങാൻ വേണ്ടി അതേ നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് തിരികെ ഓടിക്കുന്നതുമായ പെരുമാറ്റങ്ങൾ.

-
ആദ്യത്തെ ചുവന്ന ഡിസ്ക് നീക്കിക്കഴിഞ്ഞാൽ, VR റോബോട്ട് പച്ച ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്ത് ആദ്യത്തെ പച്ച ഡിസ്ക് നീക്കാൻ നീലയും ചുവപ്പും ഡിസ്ക് നീക്കാൻ ഉപയോഗിച്ച അതേ പ്രവർത്തനങ്ങൾ ചെയ്യേണ്ടതുണ്ട്.

-
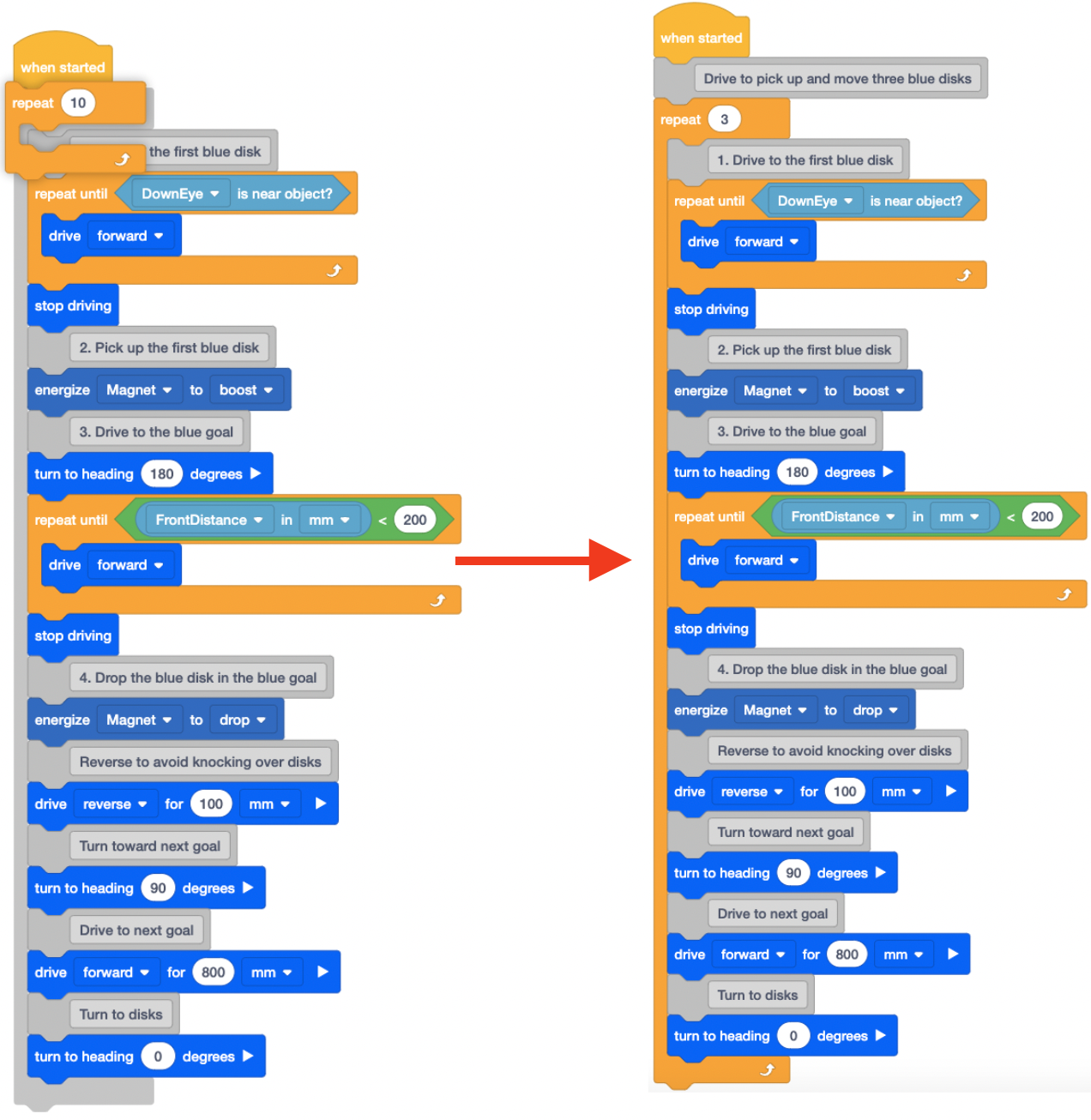
പെരുമാറ്റങ്ങൾ ഒന്നിലധികം തവണ ആവർത്തിക്കുന്നതിന്, ഒരു [ആവർത്തിക്കുക] ബ്ലോക്ക് ഉപയോഗിക്കാം.

-
കോഡിലേക്ക് ഒരു [ആവർത്തിക്കുക] ബ്ലോക്ക് ചേർത്ത് പാരാമീറ്റർ '3' ആയി സജ്ജമാക്കുക.
- ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
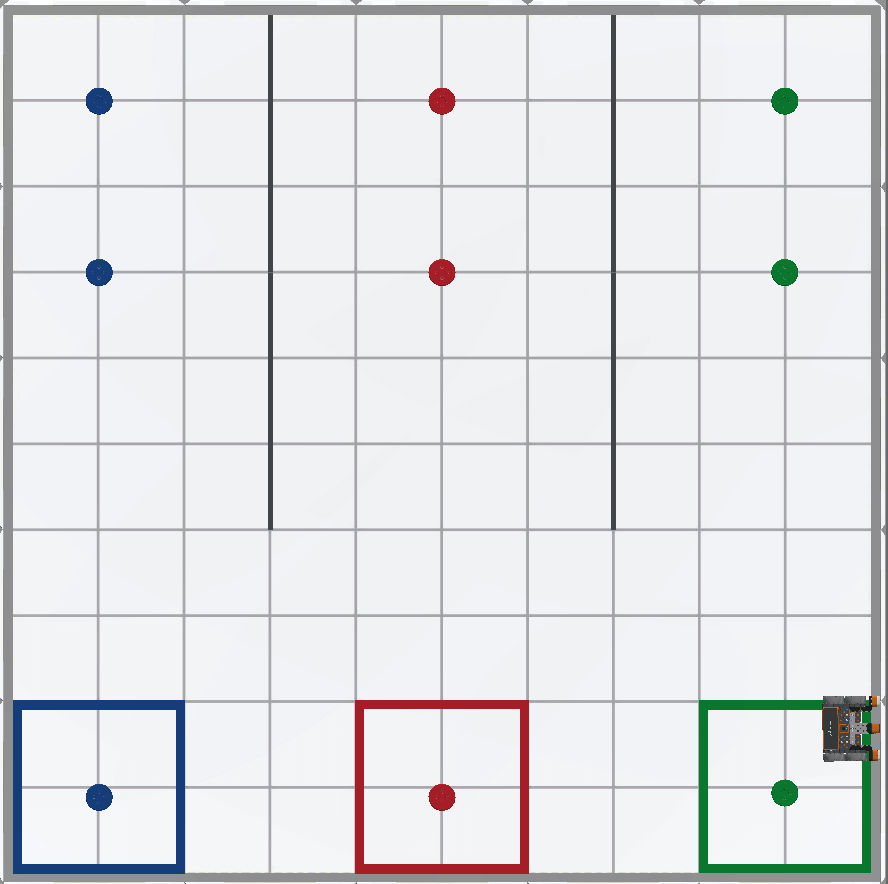
ഈ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ, വിആർ റോബോട്ട് ഓരോ നിറത്തിന്റെയും ഒരു ഡിസ്ക് എടുത്ത് അതിന്റെ അനുബന്ധ നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് ഇടുന്നു.
-
ശ്രദ്ധിക്കുക, വിആർ റോബോട്ട് മതിലിലേക്ക് ഇടിച്ചുകയറിക്കൊണ്ടിരുന്നു. പദ്ധതി പ്രകാരം വി.ആർ. റോബോട്ടിനോട് വലത്തേക്ക് തിരിഞ്ഞ് അടുത്ത ലക്ഷ്യത്തിലേക്ക് മൂന്ന് തവണ ഡ്രൈവ് ചെയ്യാൻ നിർദ്ദേശിച്ചതിനാൽ ഈ സ്വഭാവം പ്രതീക്ഷിക്കുന്നു. ആദ്യമായി നീലയിൽ നിന്ന് ചുവപ്പിലേക്ക് വാഹനമോടിക്കുന്നു. രണ്ടാമത്തേത് ചുവപ്പിൽ നിന്ന് പച്ചയിലേക്കും, മൂന്നാമത്തേത് പച്ചയിൽ നിന്ന് ചുവരിലേക്കും ആണ്, കാരണം മറ്റൊരു നിറമുള്ള ലക്ഷ്യവുമില്ല. വി.ആർ. റോബോട്ട് ചുമരിൽ ഇടിച്ചു കഴിഞ്ഞാൽ പദ്ധതി നിർത്തുക. പച്ച ഡിസ്ക് എടുത്ത് നീക്കിയ ശേഷം വിആർ റോബോട്ട് നിർത്തുന്ന തരത്തിൽ പ്രോജക്റ്റ് മെച്ചപ്പെടുത്താൻ കഴിയും, പക്ഷേ ഇത് പ്രോജക്റ്റിന്റെ മൊത്തത്തിലുള്ള സങ്കീർണ്ണത വർദ്ധിപ്പിക്കും.
നിങ്ങളുടെ അറിവിലേക്കായി
ഒരു ലൂപ്പ് മറ്റൊരു ലൂപ്പിനുള്ളിൽ സ്ഥാപിക്കുന്നതിനെ നെസ്റ്റിംഗ് എന്ന് വിളിക്കുന്നു. നിങ്ങൾ ലൂപ്പുകൾ "നെസ്റ്റ്" ചെയ്യുമ്പോൾ, അകത്തെ ലൂപ്പ് എത്ര തവണ എക്സിക്യൂട്ട് ചെയ്യുന്നുവെന്ന് പുറം ലൂപ്പ് നിയന്ത്രിക്കുന്നു. നെസ്റ്റഡ് ചെയ്യാൻ കഴിയുന്ന നിരവധി തരം ലൂപ്പുകൾ ഉണ്ട്. ഉദാഹരണത്തിന്, മുകളിലുള്ള മുൻ കോഡിൽ, [Repeat until] ബ്ലോക്കുകൾ ഒരു [Repeat] ബ്ലോക്കിനുള്ളിൽ നെസ്റ്റ് ചെയ്തിരിക്കുന്നു.
ഒരു [Repeat] ബ്ലോക്ക് മറ്റൊരു [Repeat] ബ്ലോക്കിനുള്ളിലും നെസ്റ്റ് ചെയ്യാവുന്നതാണ്. താഴെ കൊടുത്തിരിക്കുന്ന ഉദാഹരണത്തിൽ, പുറം [ആവർത്തിക്കുക] ബ്ലോക്ക് '3' ആയി സജ്ജീകരിച്ചിരിക്കുന്നതിനാൽ, VR റോബോട്ട് പ്ലേഗ്രൗണ്ടിൽ മൂന്ന് ചതുരങ്ങൾ വരയ്ക്കും.

ഒരു വിആർ റോബോട്ട് ഒരേ പെരുമാറ്റങ്ങൾ ഒന്നിലധികം തവണ ആവർത്തിക്കുന്ന പ്രോജക്റ്റുകളിൽ നെസ്റ്റഡ് ലൂപ്പുകൾ സഹായകരമാണ്. നെസ്റ്റിംഗ് ലൂപ്പുകൾ ഒരു പ്രോജക്റ്റ് സംഘടിപ്പിക്കുകയും ഘനീഭവിപ്പിക്കുകയും ചെയ്യുന്നു. കോഡിന്റെ സന്ദർഭവും ഉദ്ദേശ്യവും നന്നായി മനസ്സിലാക്കുന്നതിനും പിശകുകൾ കണ്ടെത്തുന്നത് എളുപ്പമാക്കുന്നതിനും ഇത് സഹായകമാകും.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.