
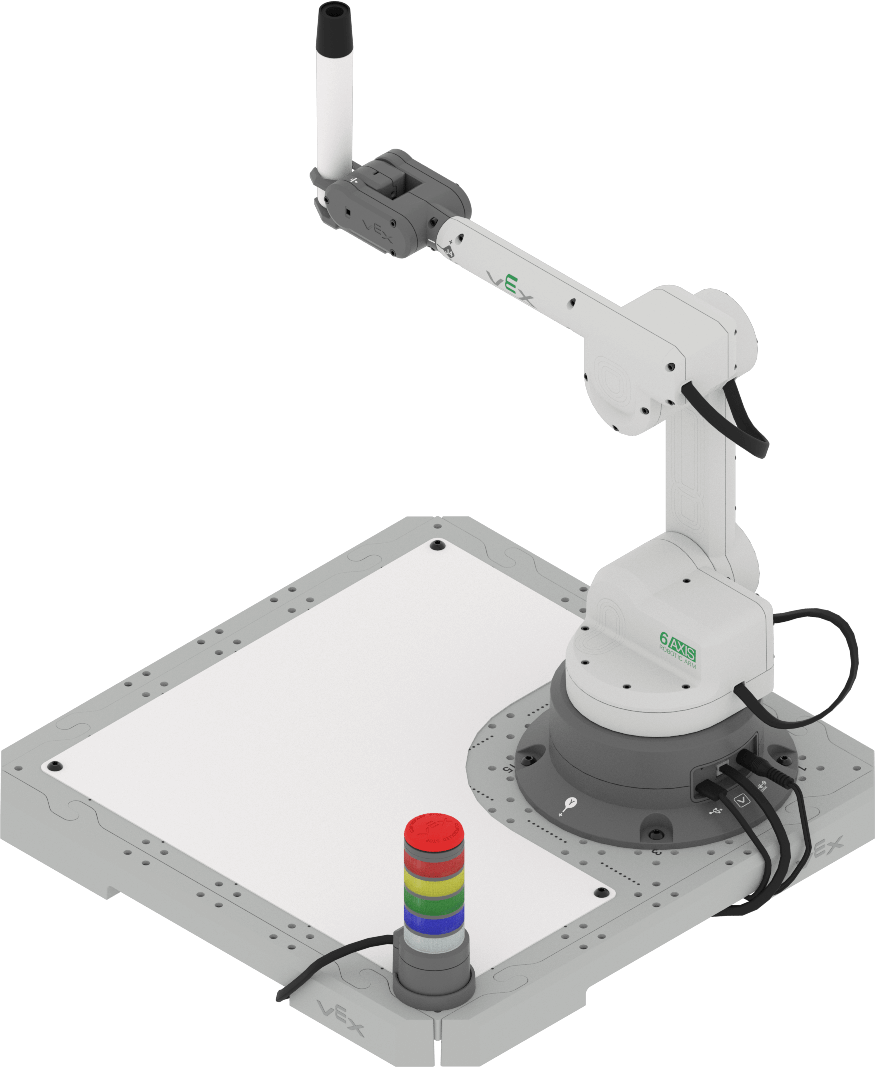
في الوحدات السابقة، كان لديك أداة التقاط المغناطيس المرفقة بذراعك الروبوتية ذات 6 محاور واستخدمتها لالتقاط الأقراص ونقلها على بلاط CTE. في هذه الوحدة، ستقوم بتغيير المستجيب النهائي إلى أداة حامل القلم واستخدام قلم تحديد المسح الجاف للرسم على البلاط مع سطح المسح الجاف.
في هذا الدرس، سوف:
- اتبع تعليمات البناء لتغيير المستجيب النهائي وإضافة سطح المسح الجاف.
- التعرف على كيفية استخدام القلم.
- رسم خط على البلاط.
ملف فيديو
تغيير المؤثر الطرفي
في الوحدة السابقة، تعرفت على المؤثرات الطرفية المختلفة في مجموعة خلايا عمل CTE. اتبع الخطوات أدناه لتغيير تصميمك.
ترميز القلم
من أجل ترميز ذراع 6 محاور لتحريك القلم والرسم على السبورة البيضاء، هناك بعض الأشياء التي نحتاج إلى أخذها في الاعتبار والبناء في مشروع. في هذا الدرس، ستبدأ في ترميز القلم.
ضبط مؤثر النهاية في VEXcode
في المشاريع في هذه الوحدة، ستلاحظ كتلة جديدة، كتلة مستجيب النهاية المحددة.
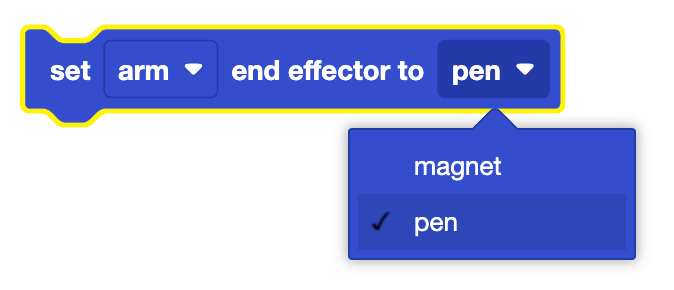
يتم استخدام كتلة مستجيب النهاية المحددة لتوصيل مستجيب النهاية المستخدم إلى الذراع سداسي المحاور حتى يتمكن من تعيين نقطة مركز الأداة الجديدة (TCP). يمكن تغيير المستجيب النهائي باستخدام خيار القائمة المنسدلة على الكتلة.

في الوحدة 1، تعلمت أن إحداثيات (x، y، z) للذراع سداسي المحاور يتم تحديدها باستخدام المسافة من الأصل إلى TCP.
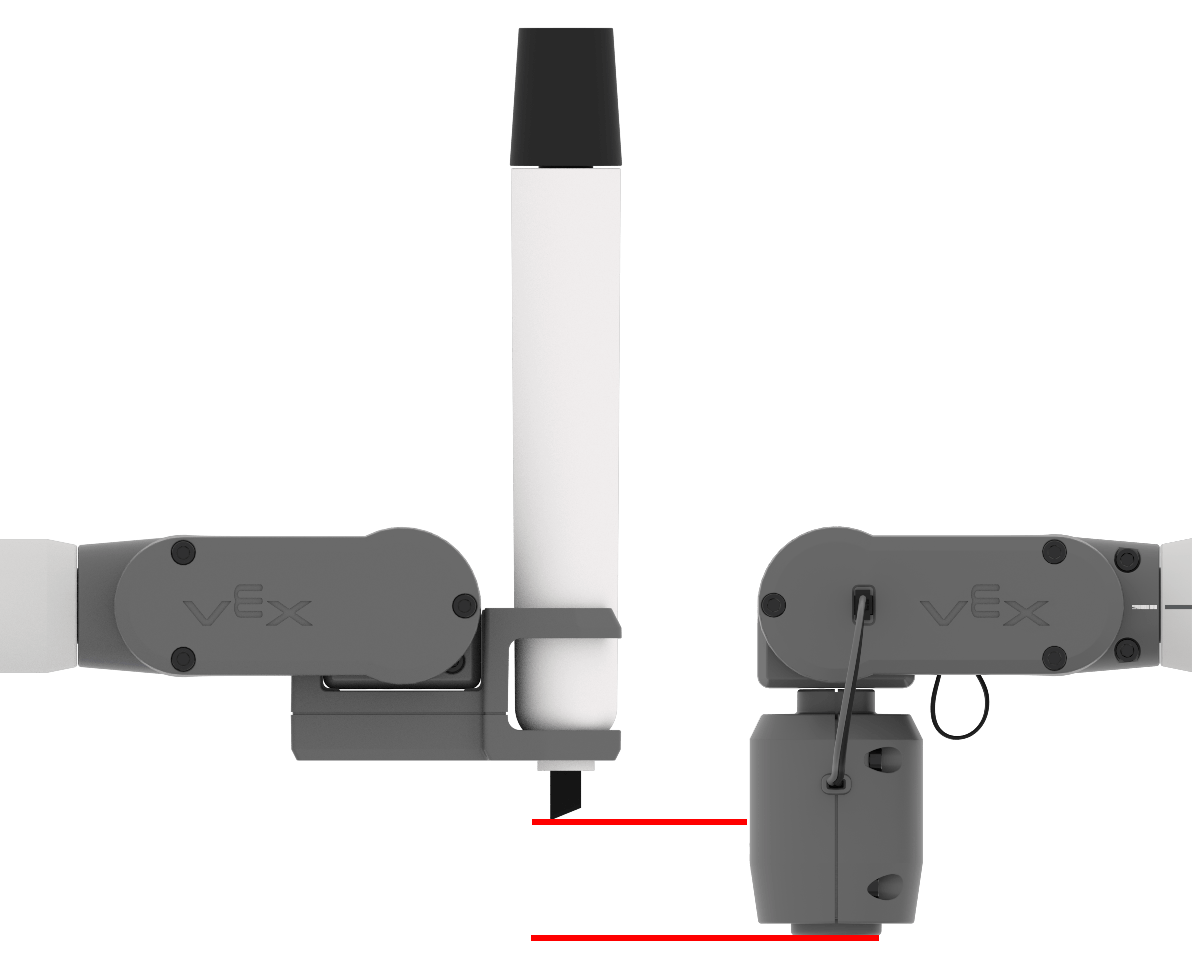
يكون TCP للقلم في قيمة z مختلفة عن المغناطيس. إذا لم يتم استخدام كتلة
المستجيب الطرفي لضبط المستجيب الطرفي، فقد يوفر ذراع 6 محاور إحداثيات غير
دقيقة أو ينتقل إلى موقع غير مقصود.
رسم خط
الآن بعد أن فهمت أجزاء المشروع من الناحية المفاهيمية، اتبع الخطوات أدناه لإنشاء المشروع وتشغيله وشاهد خطًا مرسومًا على السبورة البيضاء.
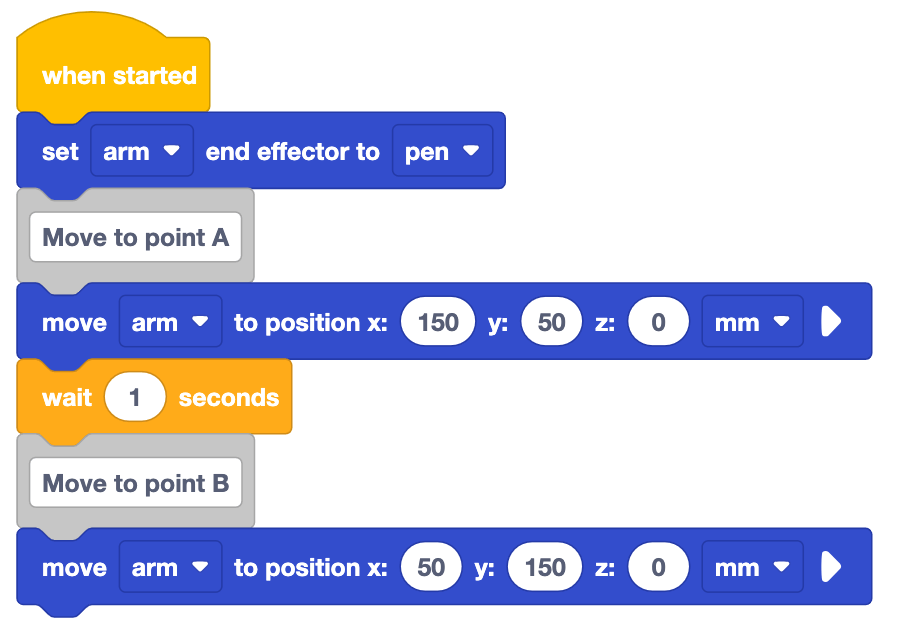
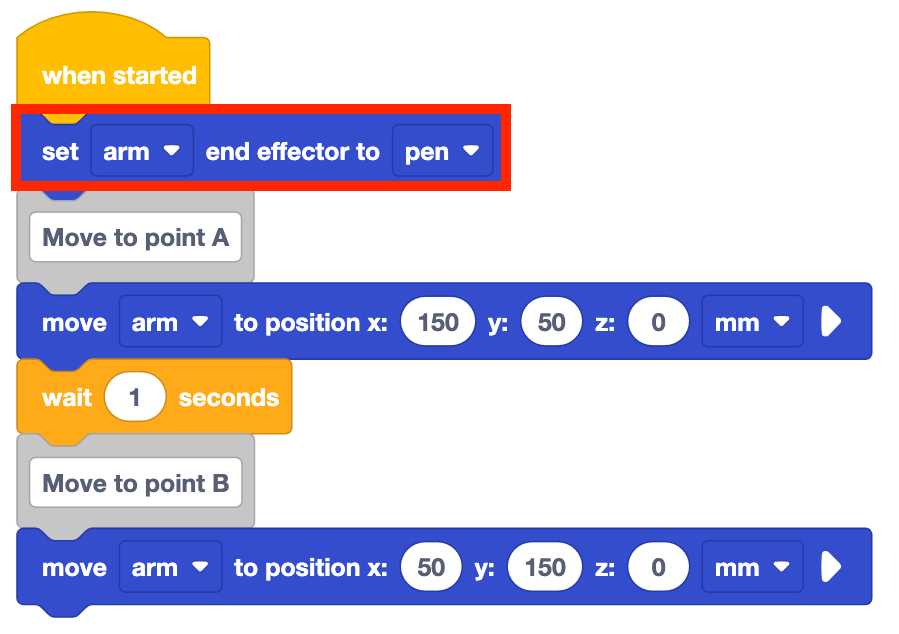
افتح مشروع كتل جديدة وأعد إنشاء المشروع الموضح هنا.
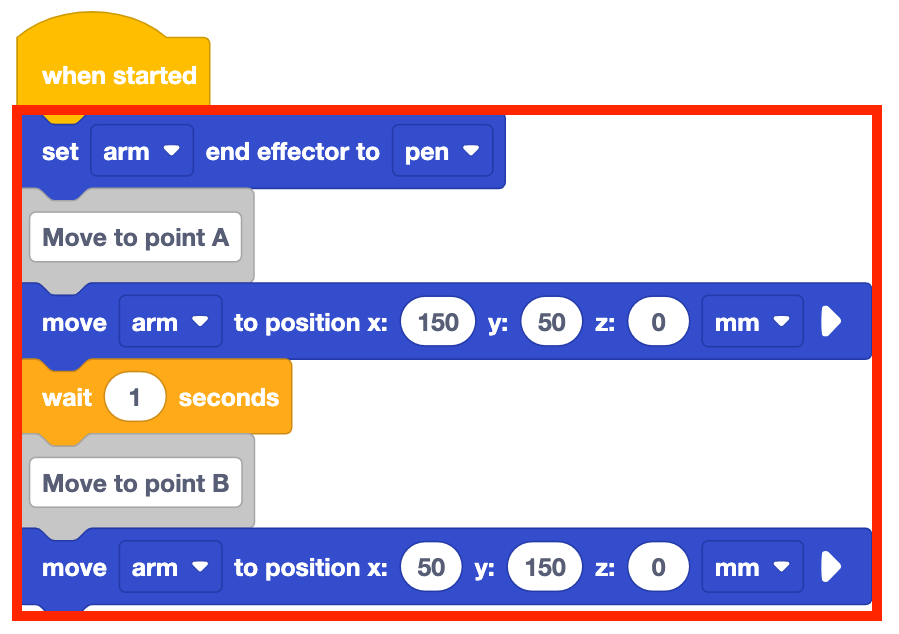
انظر إلى الكتل في المشروع. كيف تعتقد أن ذراع 6 محاور سيتحرك بناءً على هذا المشروع ؟ سجل تنبؤك في دفتر ملاحظاتك الهندسي.
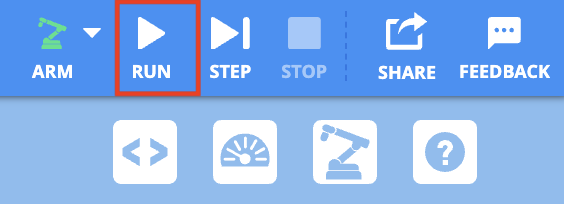
تأكد من توصيل ذراع 6 محاور برمز VEX. قم بتشغيل المشروع.
لاحظ أن الذراع المكون من 6 محاور يستخدم القلم لرسم خط من الإحداثي الأول إلى الثاني على السبورة البيضاء.
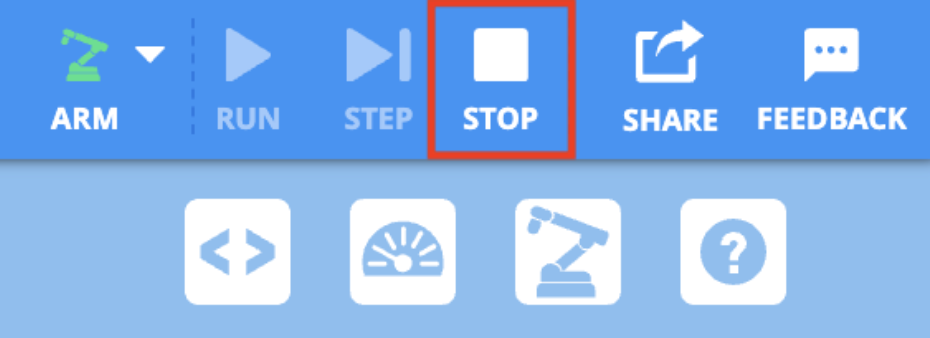
أوقف المشروع بمجرد توقف ذراع 6 محاور عن الحركة.
كيف تقارن حركة الذراع سداسي المحاور بتوقعاتك أعلاه ؟ سجل هذه المقارنات في دفترك الهندسي.
تحقق من فهمك
قبل الانتقال إلى الدرس التالي، تأكد من فهمك للمفاهيم الواردة في هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
حدد التالي > للتعرف على ترميز حركات الذراع سداسي المحاور لتجنب
العقبات.