
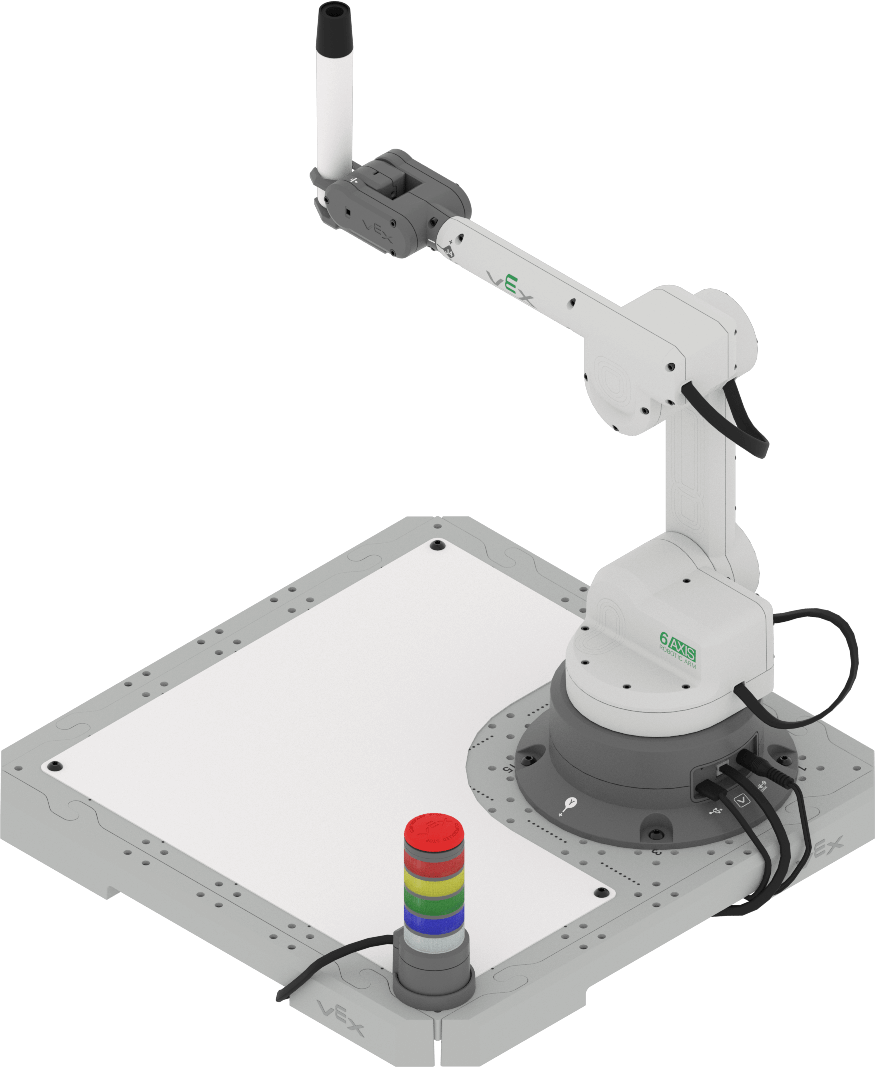
Nelle unità precedenti, hai avuto lo strumento di raccolta del magnete collegato al tuo braccio robotico a 6 assi e lo hai usato per raccogliere e spostare i dischi sulla tessera CTE. In questa unità, si cambierà l'attuatore finale con lo strumento Porta Penna e si utilizzerà un pennarello cancellabile a secco per disegnare sulla piastrella con la superficie asciutta.
In questa lezione, dovrai:
- seguire le istruzioni di costruzione per cambiare l'effettore finale e aggiungere la superficie Dry-Erase.
- imparare a usare la Penna.
- disegna una linea sulla tessera.
File video
Sostituzione dell'effettore finale
Nell'unità precedente, hai appreso di diversi effettori finali nel kit CTE Workcell. Segui i passaggi qui sotto per modificare la tua build.
Codifica della penna
Per codificare il braccio a 6 assi per spostare la penna e disegnare sulla lavagna, ci sono alcune cose che dobbiamo considerare e integrare in un progetto. In questa lezione, inizierai a codificare la penna.
Impostazione dell'effettore finale in VEXcode
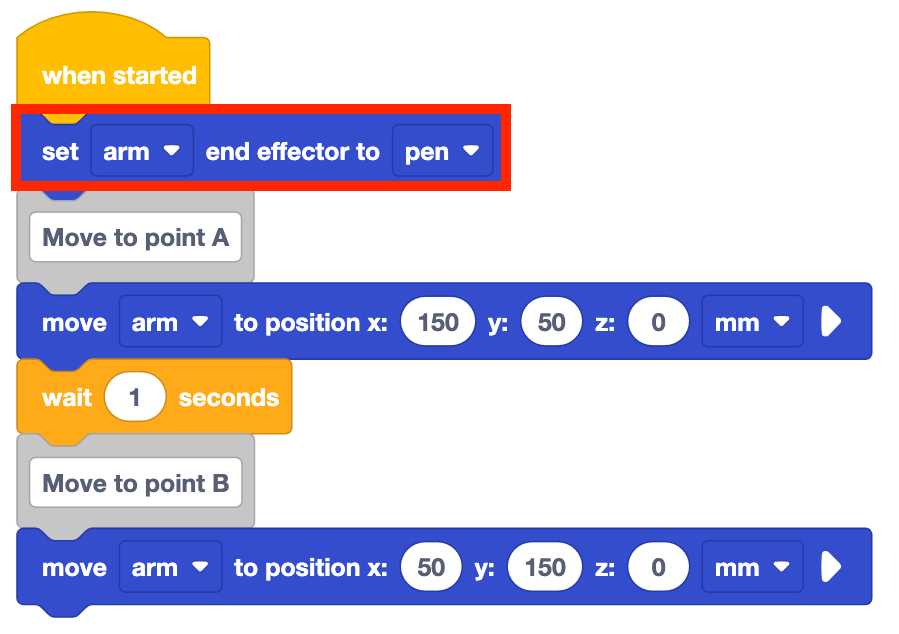
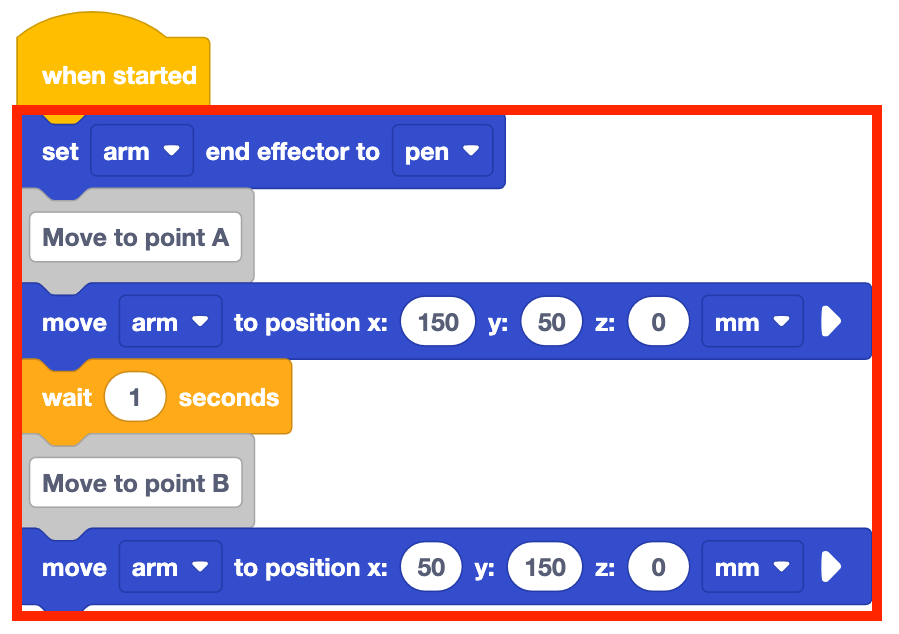
Nei progetti di questa Unità, noterai un nuovo blocco, il blocco Set end effector.
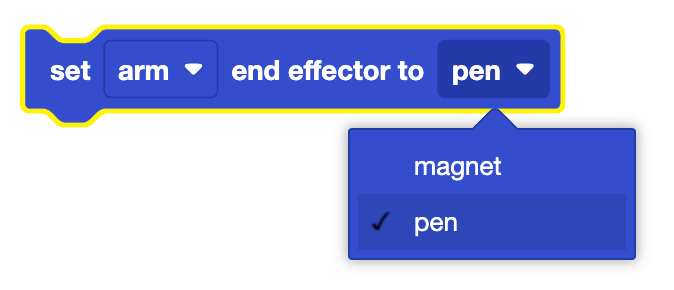
Il blocco Effettuatore terminale impostato viene utilizzato per comunicare al braccio a 6 assi quale attuatore terminale viene utilizzato in modo da poter impostare il nuovo punto centrale utensile (TCP). L'effettore finale può essere modificato utilizzando l'opzione a discesa sul blocco.

Nell'unità 1 si è appreso che le coordinate (x, y, z) del braccio a 6 assi sono determinate utilizzando la distanza dall'origine al TCP.
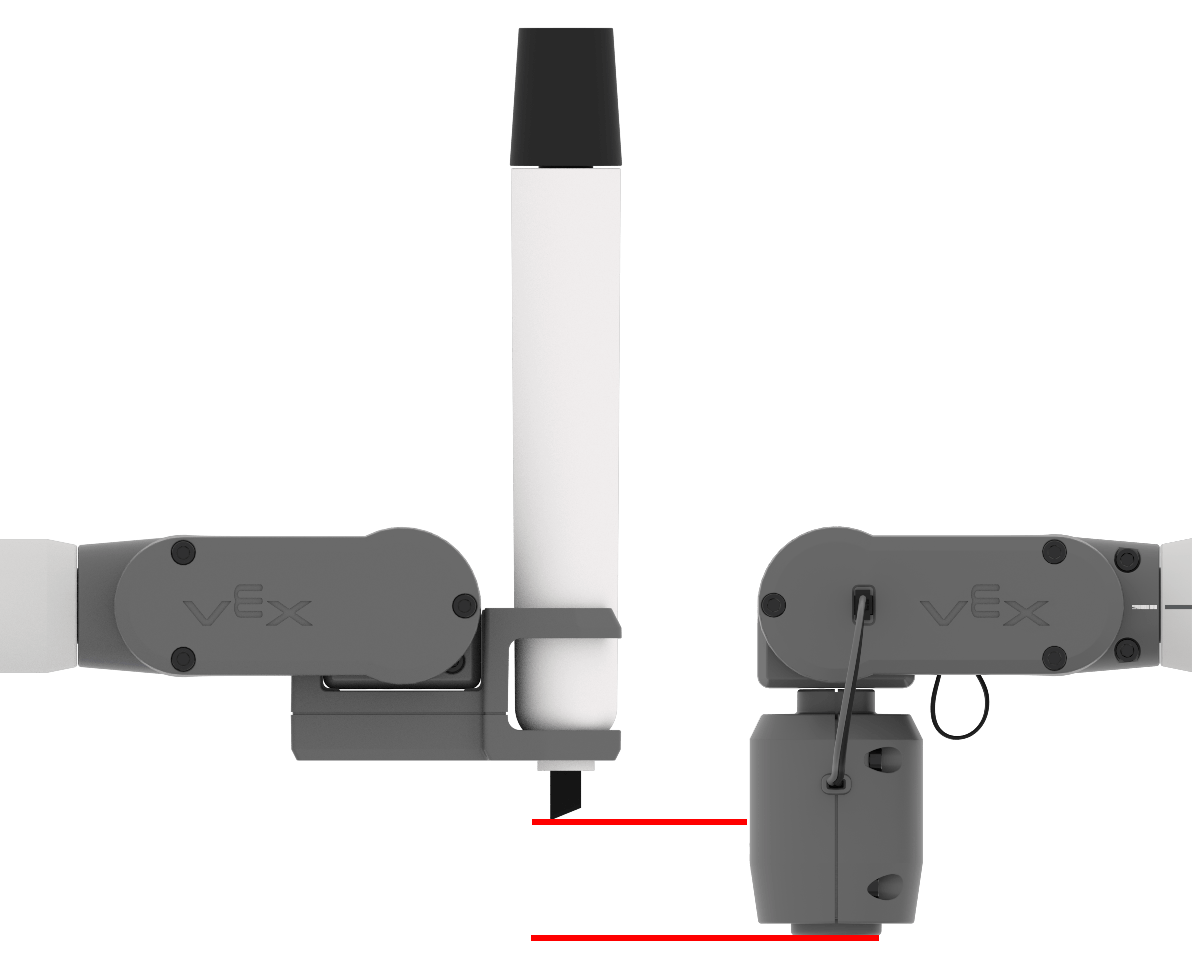
Il TCP della penna ha un valore z diverso rispetto al magnete. Se il blocco
Set end effector non viene utilizzato per regolare l'attuatore finale, il
braccio a 6 assi potrebbe fornire coordinate imprecise o spostarsi in una
posizione non prevista.
Disegnare una linea
Ora che hai compreso concettualmente le parti del progetto, segui i passaggi seguenti per creare ed eseguire il progetto e vedere una linea tracciata sulla lavagna.
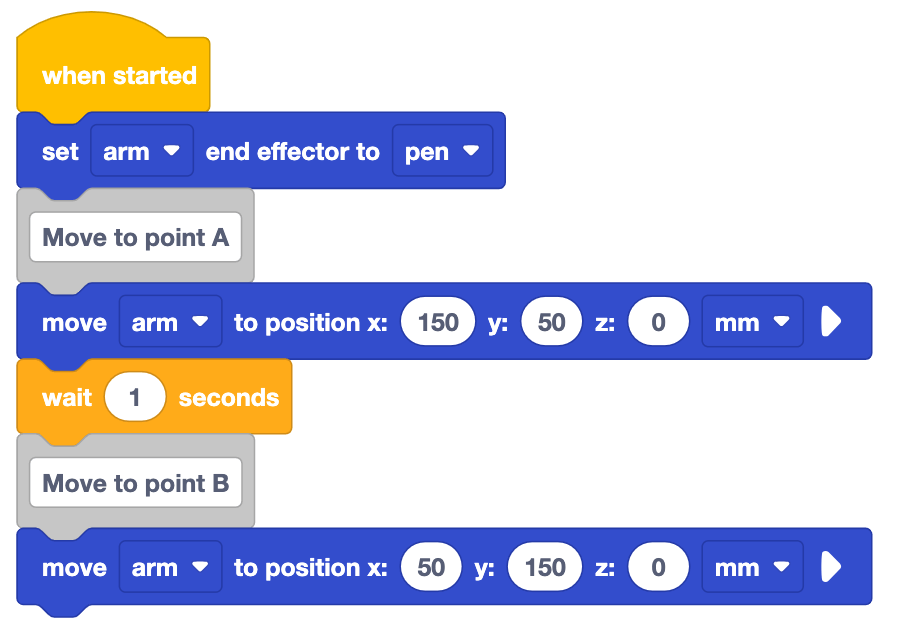
Aprire un nuovo progetto di blocchi e ricreare il progetto mostrato qui.
Guarda i blocchi nel progetto. Come pensi che si muoverà il braccio a 6 assi in base a questo progetto? Registra la tua previsione nel tuo quaderno di ingegneria.
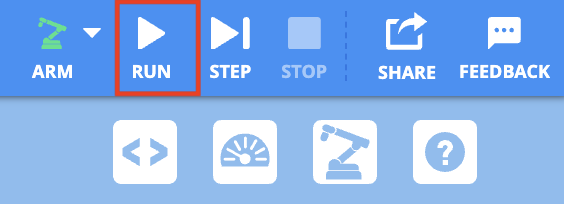
Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Eseguire il progetto.
Osservare come il braccio a 6 assi utilizza la penna per tracciare una linea dalla prima coordinata alla seconda sulla lavagna.
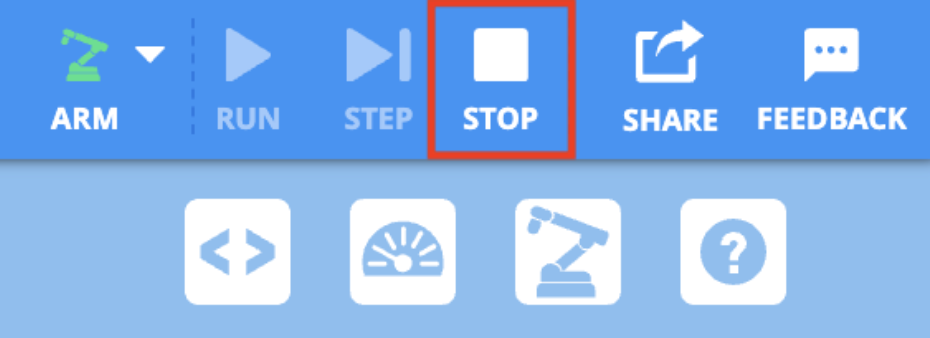
Interrompere il progetto una volta che il braccio a 6 assi ha smesso di muoversi.
In che modo il movimento del braccio a 6 assi si confronta con la previsione di cui sopra? Registra questi confronti nel tuo quaderno di ingegneria.
Verifica la tua comprensione
Prima di passare alla lezione successiva, assicurati di comprendere i concetti di questa lezione rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Domande sulla comprensione > (Google Doc / .docx / .pdf)
Selezionare Avanti > per imparare a codificare i movimenti del braccio a
6 assi per evitare ostacoli.