
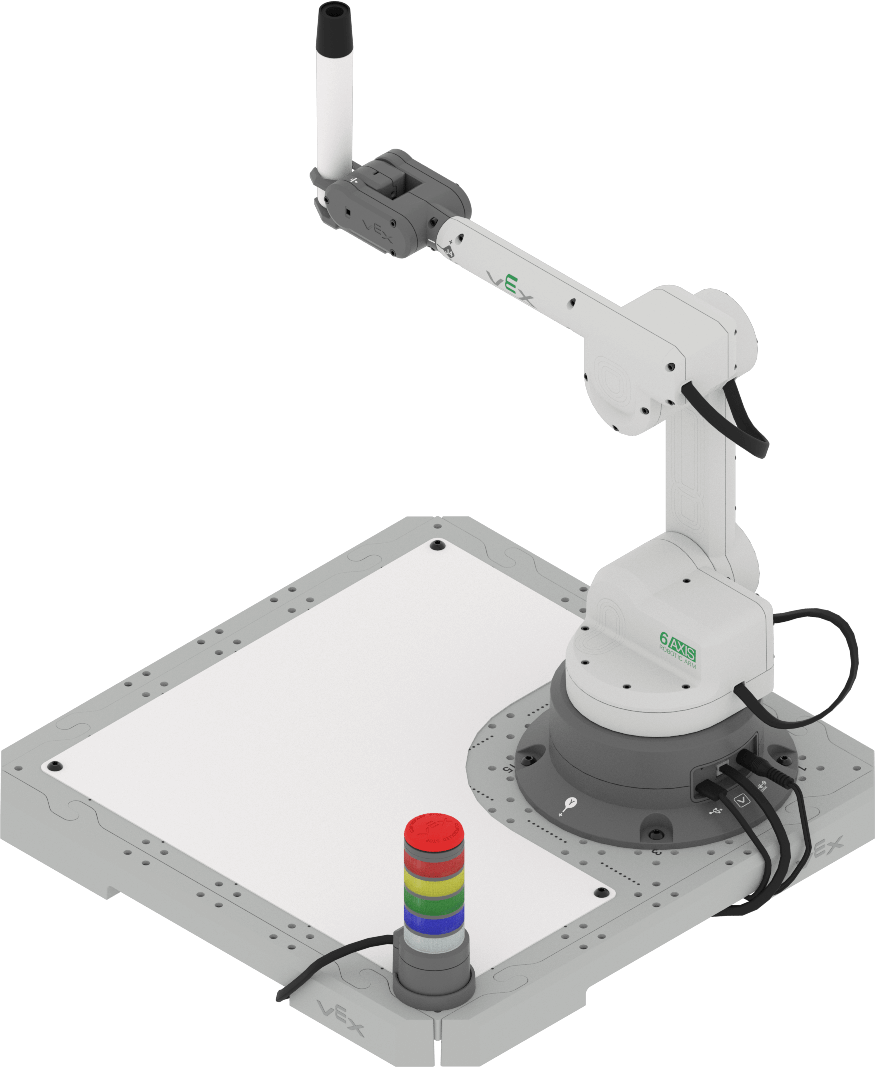
In den vorherigen Einheiten wurde das Magnetaufnahmewerkzeug an Ihrem 6-Achsen-Roboterarm angebracht und verwendet, um Scheiben auf der CTE-Kachel aufzunehmen und zu bewegen. In diesem Gerät wechseln Sie den Endeffektor in das Stifthalterwerkzeug und verwenden einen trocken abwischbaren Marker, um die Kachel mit der trocken abwischbaren Oberfläche zu zeichnen.
In dieser Lektion wirst du:
- folgen Sie den Bauanweisungen, um den Endeffektor zu wechseln und die trocken abwischbare Oberfläche hinzuzufügen.
- erfahren Sie mehr über die Verwendung des Pens.
- zeichne eine Linie auf den Stein.
Videodatei
Ändern des Endeffektors
In der vorherigen Einheit haben Sie mehr über verschiedene Endeffektoren im CTE Workcell Kit erfahren. Befolgen Sie die folgenden Schritte, um Ihren Build zu ändern.
Codierung des Stiftes
Um den 6-Achsen-Arm zu codieren, um den Stift zu bewegen und auf das Whiteboard zu zeichnen, müssen wir einige Dinge berücksichtigen und in ein Projekt einbauen. In dieser Lektion werden Sie mit dem Codieren des Stiftes beginnen.
Einstellen des Endeffektors in VEXcode
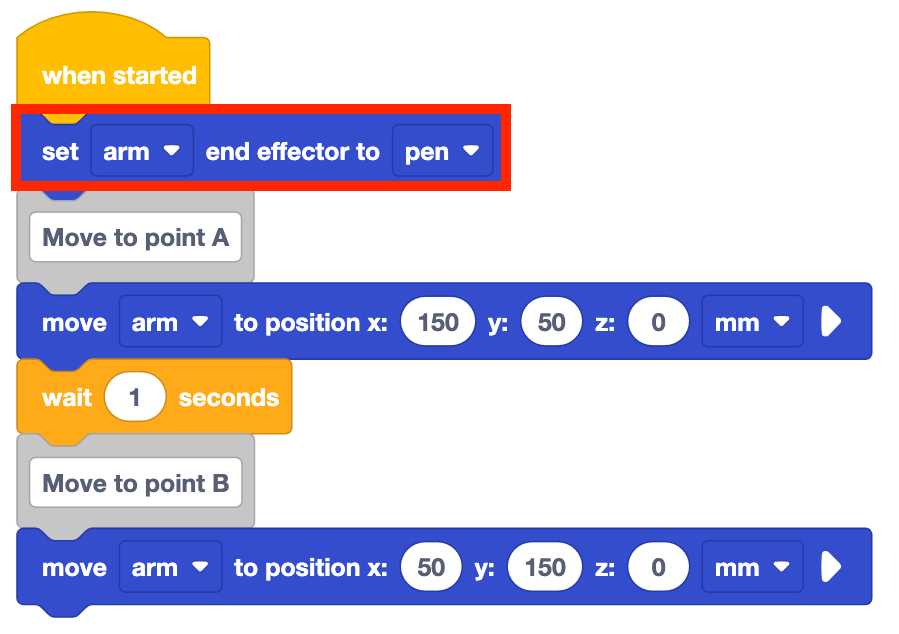
In den Projekten in dieser Einheit werden Sie einen neuen Block bemerken , den Set-Endeffektor-Block.
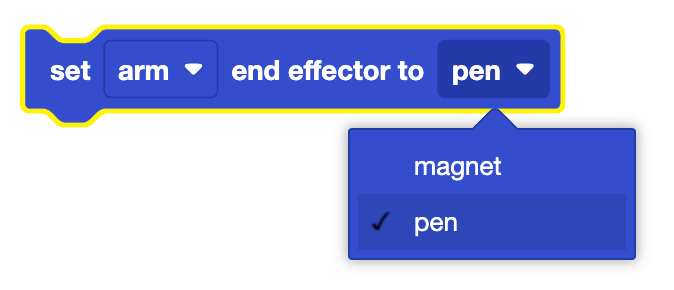
Der Set-Endeffektor-Block wird verwendet, um dem 6-Achsen-Arm mitzuteilen, welcher Endeffektor verwendet wird, damit er den neuen Tool Center Point (TCP) einstellen kann. Der Endeffektor kann mit der Dropdown-Option auf dem Block geändert werden.

In Einheit 1 haben Sie gelernt, dass die (x, y, z) -Koordinaten des 6-Achsen-Arms anhand der Entfernung vom Ursprung zum TCP bestimmt werden.
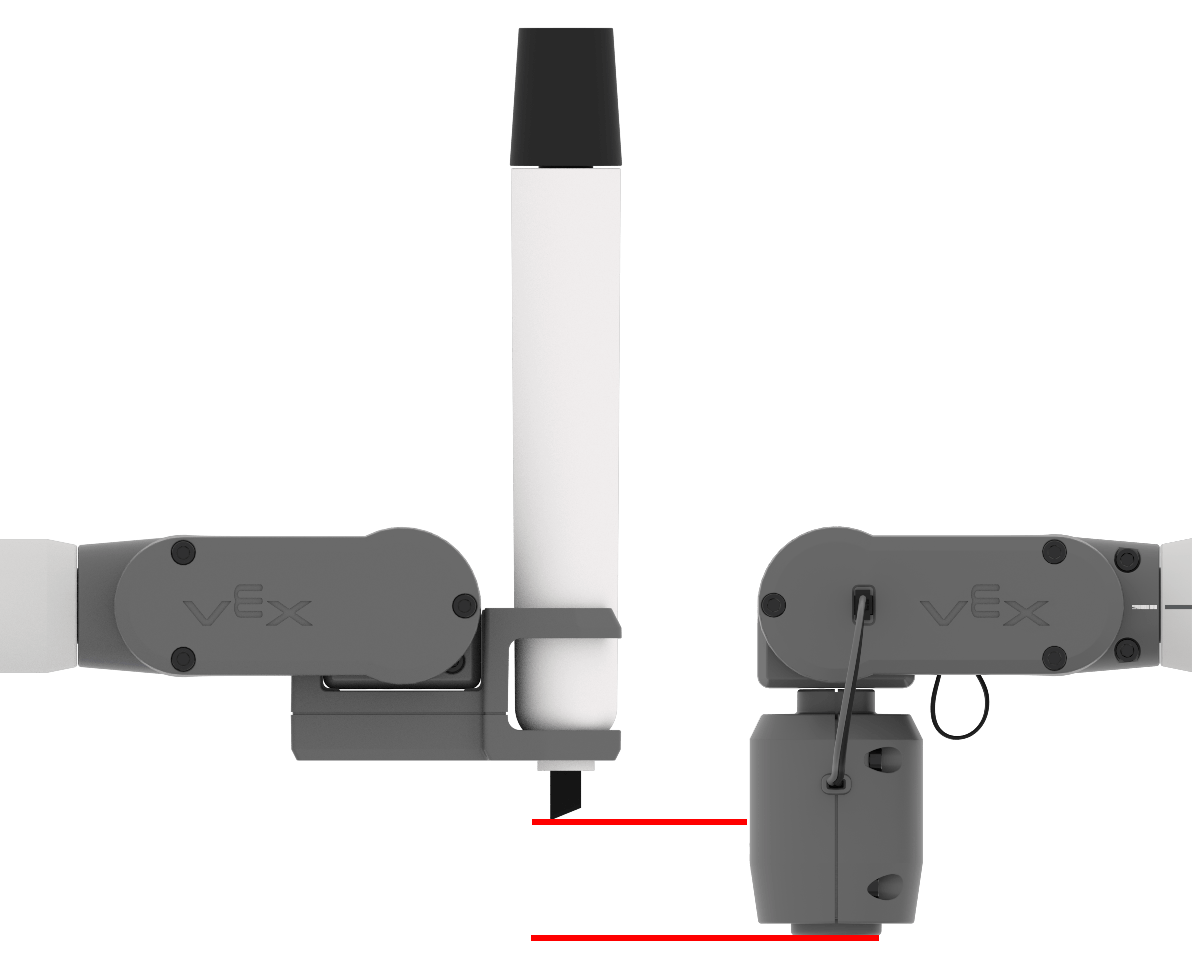
Der TCP des Stifts hat einen anderen z-Wert als der Magnet. Wenn der
Set-Endeffektor-Block nicht verwendet wird, um den Endeffektor
einzustellen, kann der 6-Achsen-Arm ungenaue Koordinaten liefern oder sich an eine
unbeabsichtigte Stelle bewegen.
Zeichnen einer Linie
Nachdem Sie nun die Teile des Projekts konzeptionell verstanden haben, befolgen Sie die folgenden Schritte, um das Projekt zu erstellen und auszuführen und eine Linie auf dem Whiteboard zu sehen.
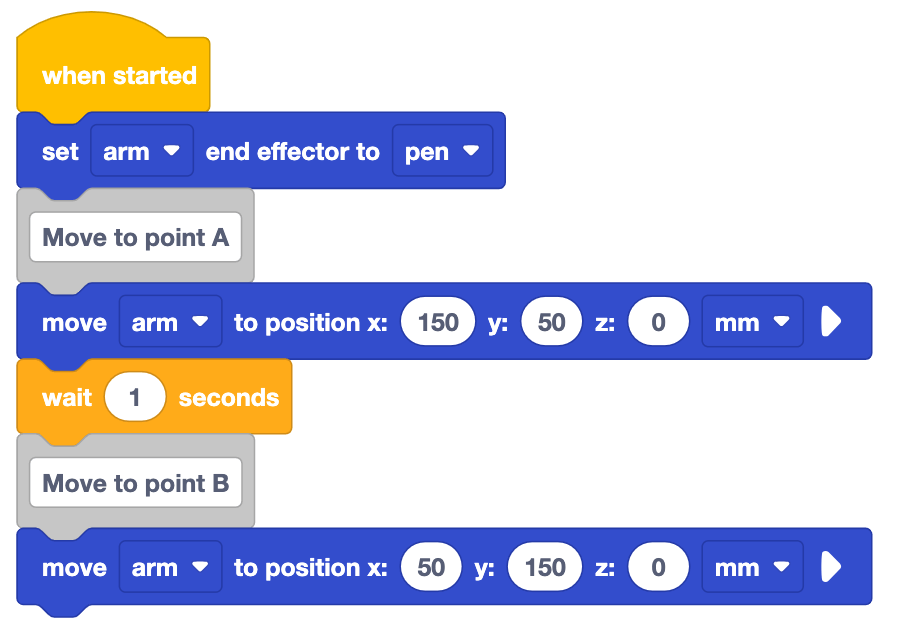
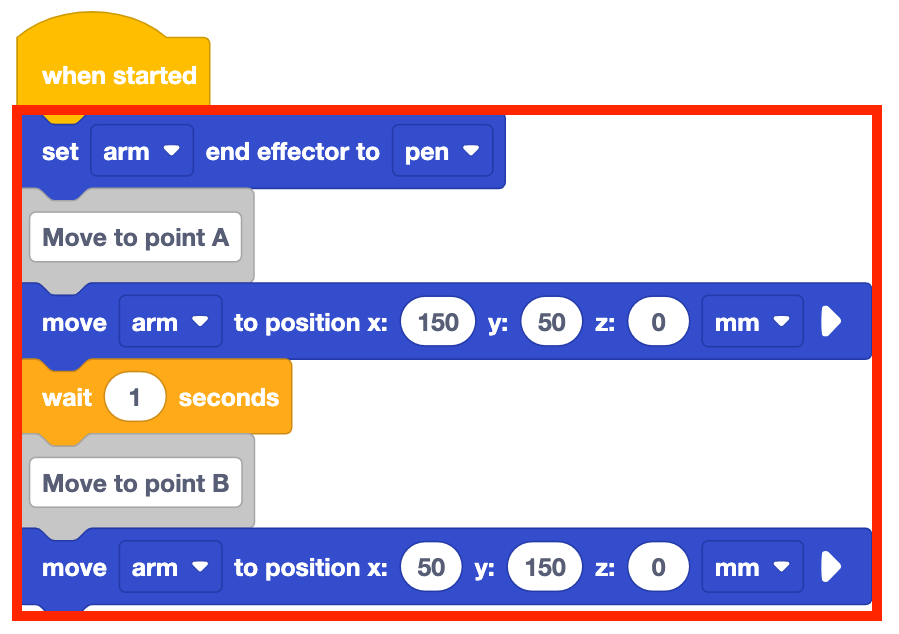
Öffnen Sie ein neues Blockprojekt und erstellen Sie das hier gezeigte Projekt neu.
Schauen Sie sich die Blöcke im Projekt an. Wie wird sich der 6-Achsen-Arm Ihrer Meinung nach aufgrund dieses Projekts bewegen? Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch.
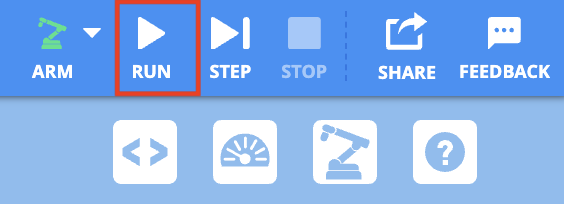
Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist. Führen Sie das Projekt aus.
Beobachten Sie, wie der 6-Achsen-Arm den Stift verwendet, um eine Linie von der ersten Koordinate zur zweiten auf dem Whiteboard zu zeichnen.
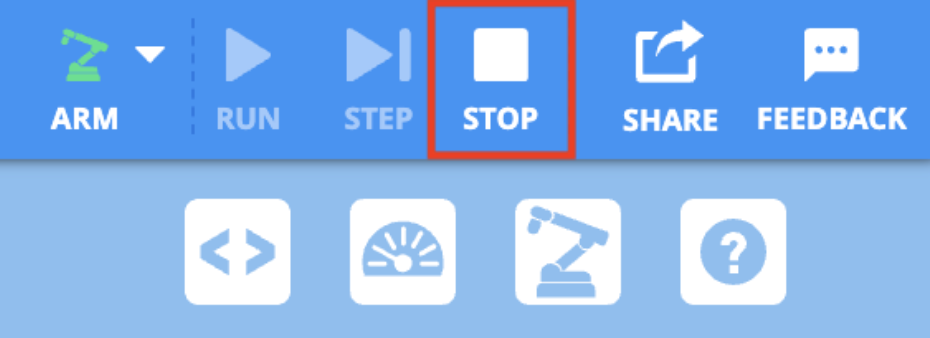
Stoppen Sie das Projekt, sobald sich der 6-Achsen-Arm nicht mehr bewegt.
Wie verhält sich die Bewegung des 6-Achsen-Arms im Vergleich zu Ihrer obigen Vorhersage? Notieren Sie diese Vergleiche in Ihrem technischen Notizbuch.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion fortfahren, stellen Sie sicher, dass Sie die Konzepte in dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um mehr über die Codierung der Bewegungen des
6-Achsen-Arms zu erfahren, um Hindernissen auszuweichen.