
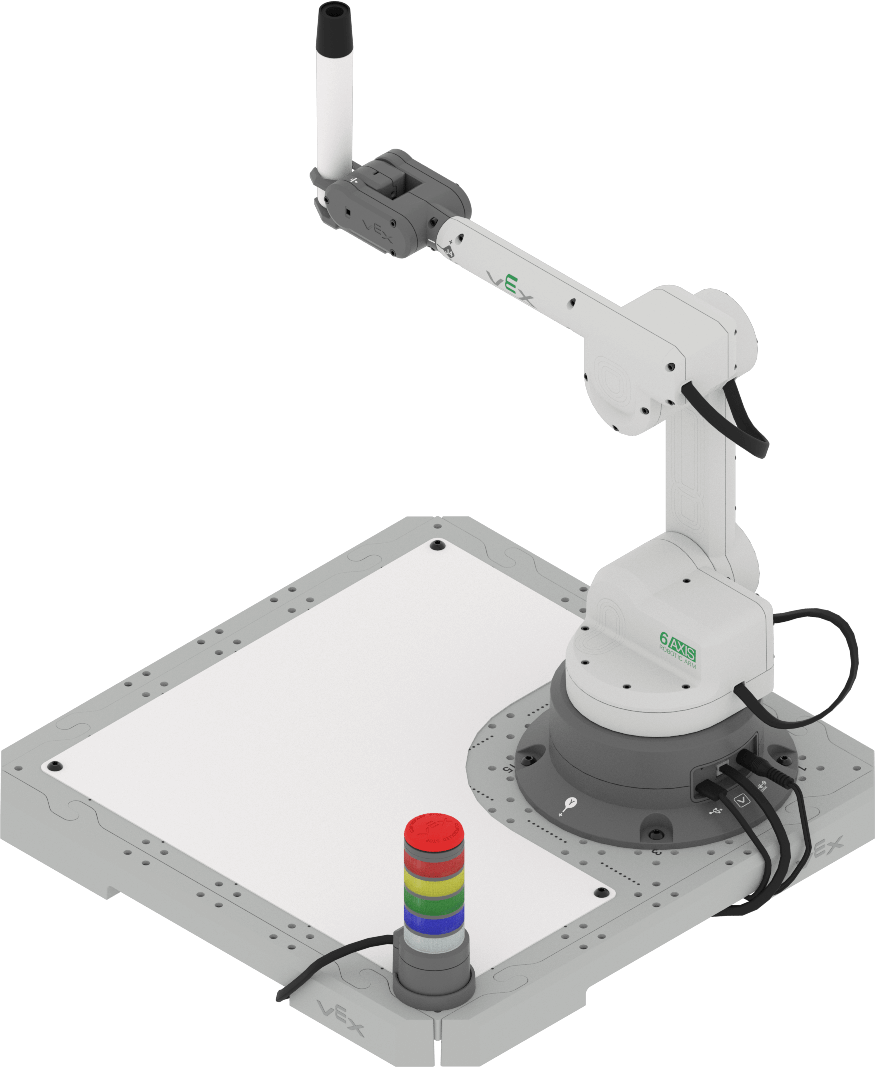
Nas Unidades anteriores, você teve a Ferramenta de Captura de Ímã conectada ao seu Braço Robótico de 6 Eixos e a usou para pegar e mover Discos na Peça CTE. Nesta Unidade, você mudará o efetor final para a Ferramenta Suporte de Caneta e usará um marcador de apagamento a seco para desenhar na Peça com a Superfície de Erras Secas.
Nesta lição, você irá:
- siga as instruções de construção para alterar o efetor final e adicione a superfície Dry-Erase.
- aprender sobre como usar a Caneta.
- desenhar uma linha na Peça.
Ficheiro de vídeo
Alterar o efetor final
Na Unidade anterior, você aprendeu sobre diferentes efetores finais no Kit de Células de Trabalho CTE. Siga as etapas abaixo para alterar sua compilação.
Codificando a caneta
Para codificar o Braço de 6 Eixos para mover a Caneta e desenhar no quadro branco, há algumas coisas que precisamos considerar e construir em um projeto. Nesta lição, você começará a codificar a caneta.
Definir o efetor final no VEXcode
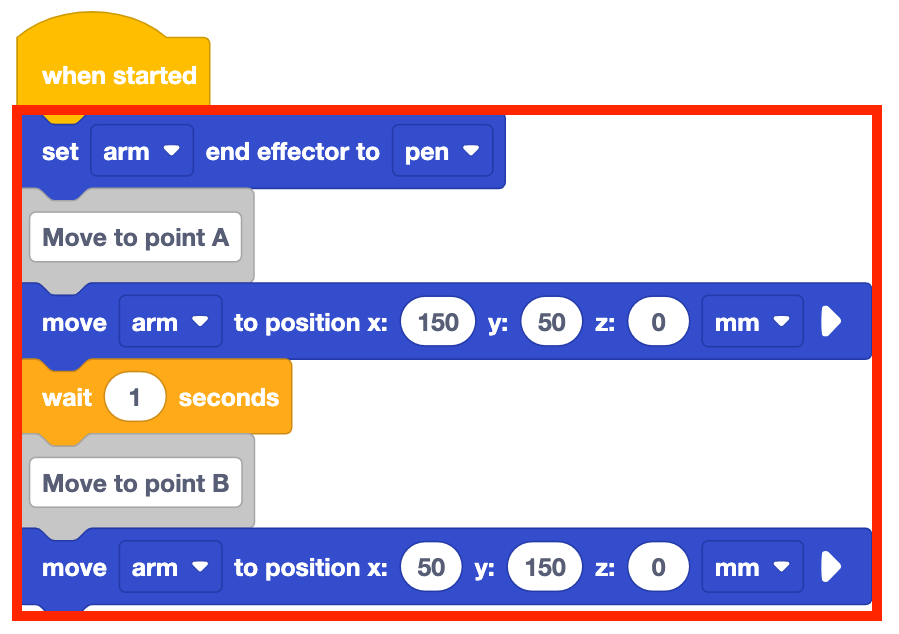
Nos projetos desta Unidade, você notará um novo bloco, o bloco Definir efetor final.
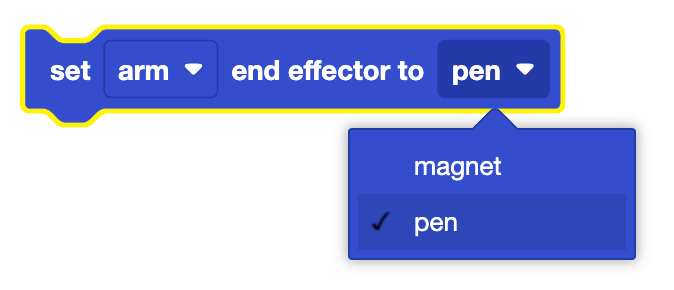
O bloco Definir efetor final é usado para comunicar ao Braço de 6 Eixos qual efetor final está sendo usado para que ele possa definir o novo Ponto Central da Ferramenta (TCP). O efetor final pode ser alterado usando a opção suspensa no bloco.

Na Unidade 1, você aprendeu que as coordenadas (x, y, z) do Braço de 6 Eixos são determinadas usando a distância da origem ao TCP.
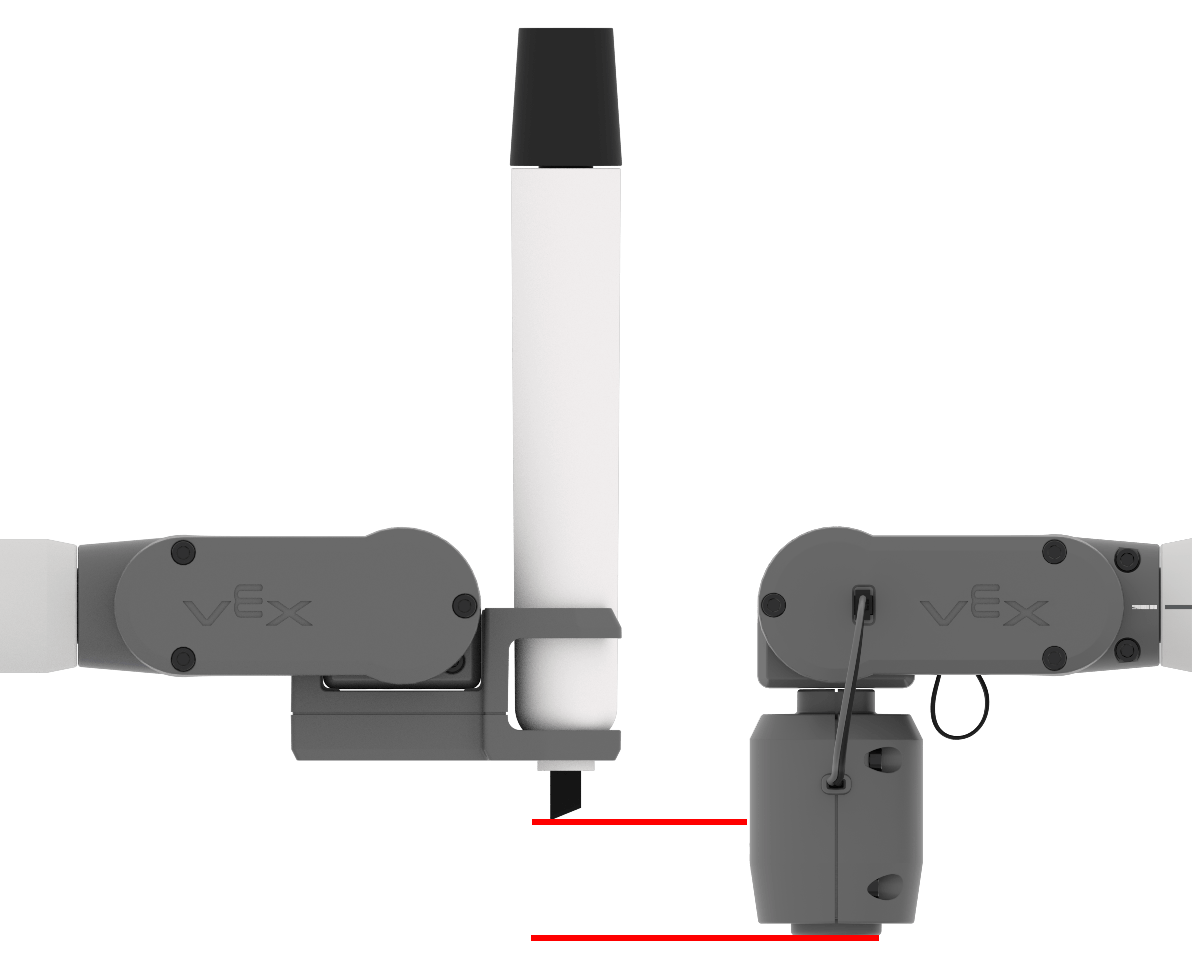
O TCP da Caneta tem um valor z diferente do Ímã. Se o bloco efetor
de
extremidade definido não for usado para ajustar o efetor de extremidade, o
Braço de 6 Eixos pode fornecer coordenadas imprecisas ou se mover para um local
não intencional.
Desenhar uma linha
Agora que você entende conceitualmente as partes do projeto, siga as etapas abaixo para criar e executar o projeto e ver uma linha desenhada no quadro branco.
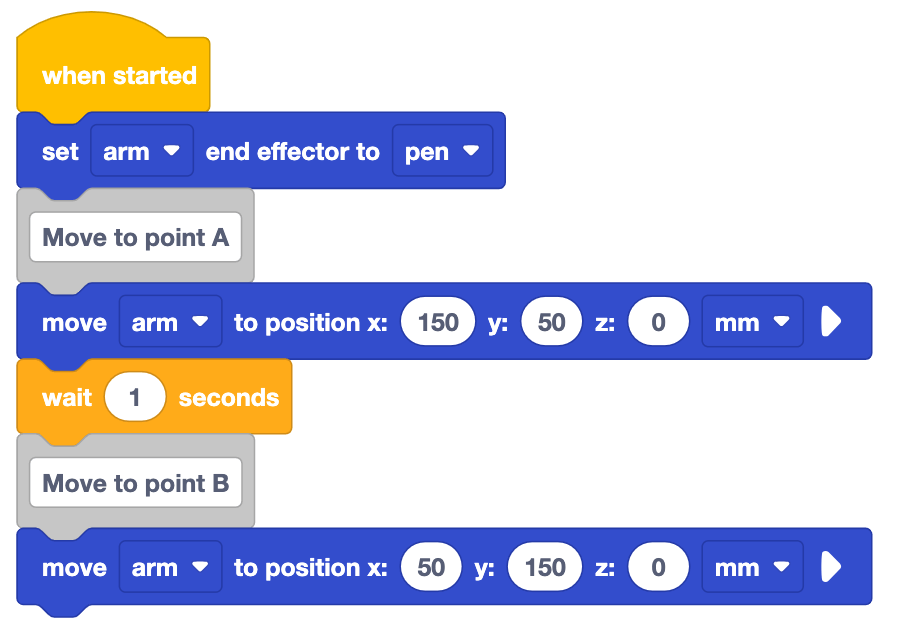
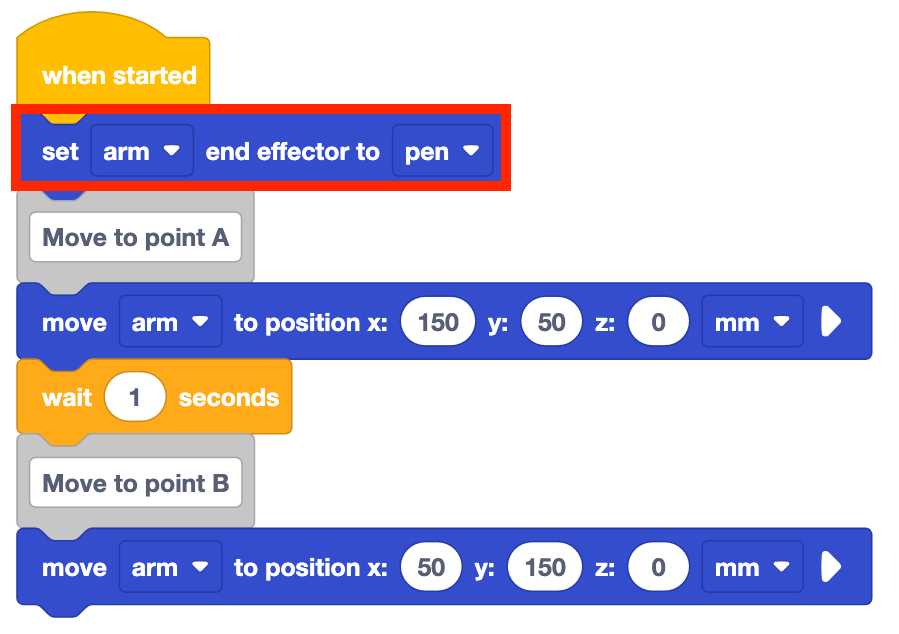
Abra um Novo Projeto de Blocos e recrie o projeto mostrado aqui.
Olhe para os blocos no projeto. Como você acha que o Braço de 6 Eixos se moverá com base neste projeto? Grave a sua previsão no seu caderno de engenharia.
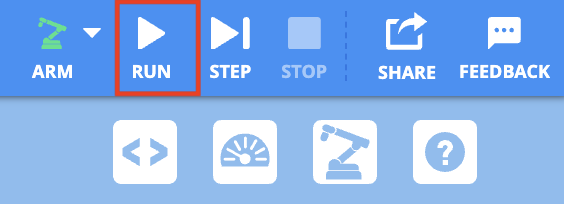
Certifique-se de que o braço de 6 eixos esteja conectado ao VEXcode. Executar o projeto.
Observe como o Braço de 6 Eixos usa a Caneta para desenhar uma linha da primeira coordenada para a segunda no quadro branco.
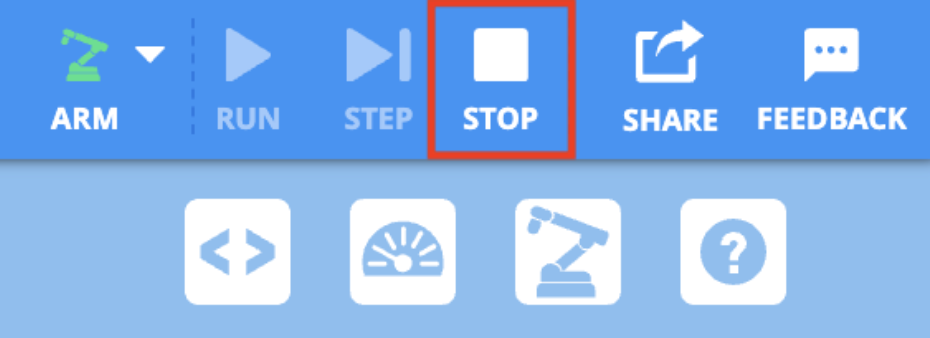
Pare o projeto assim que o braço de 6 eixos parar de se mover.
Como o movimento do Braço de 6 eixos se compara à sua previsão acima? Grave essas comparações no seu caderno de engenharia.
Verifique a sua compreensão
Antes de passar para a próxima lição, certifique-se de entender os conceitos desta lição respondendo às perguntas do documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão > (Google Doc / .docx / .pdf)
Selecione Avançar > para aprender a codificar os movimentos do Braço de 6
eixos para evitar obstáculos.