
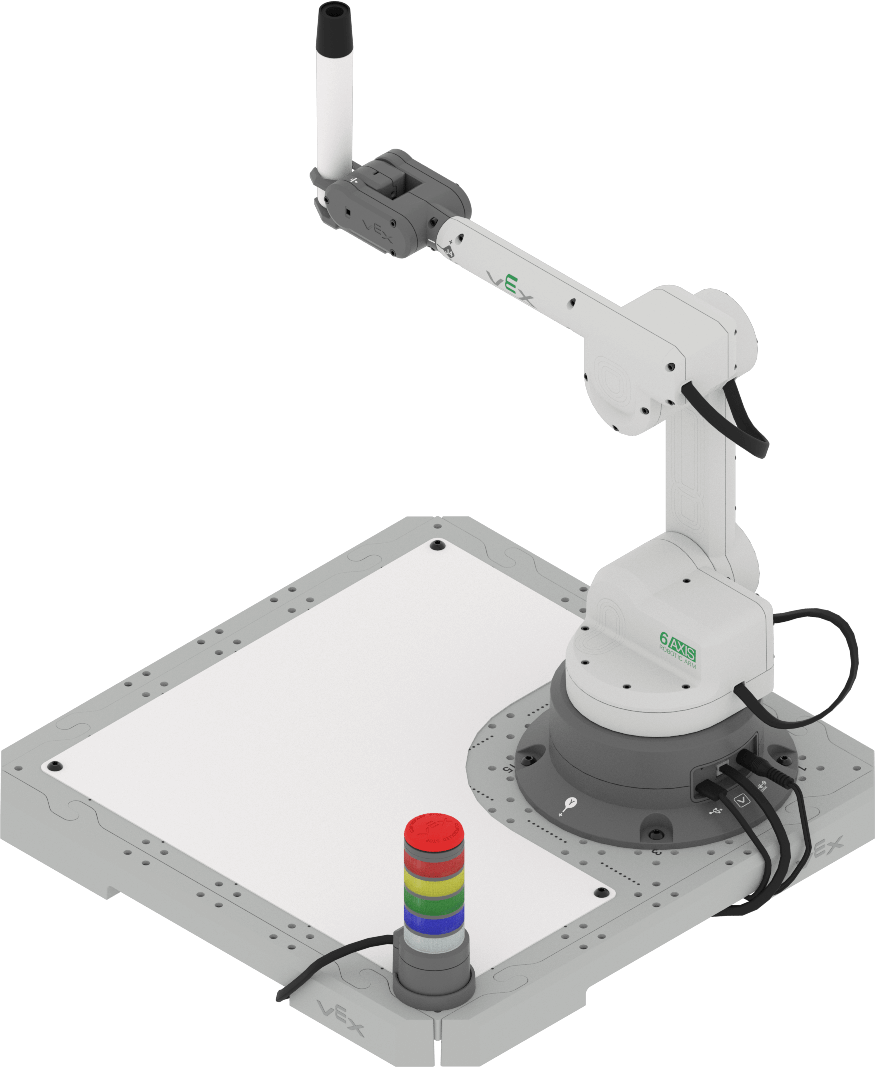
En las unidades anteriores, ha tenido la herramienta de recogida de imanes conectada a su brazo robótico de 6 ejes y la ha utilizado para recoger y mover discos en el mosaico CTE. En esta unidad, cambiará el efector final a la herramienta Portaplumas y utilizará un marcador de borrado en seco para dibujar en el mosaico con la superficie de borrado en seco.
En esta lección, usted:
- siga las instrucciones de construcción para cambiar el efector final y añadir la superficie de borrado en seco.
- aprender a usar el bolígrafo.
- dibuja una línea en el mosaico.
Archivo de vídeo
Cambio del efector final
En la unidad anterior, aprendió sobre diferentes efectores finales en el kit CTE Workcell. Sigue los pasos a continuación para cambiar tu compilación.
Codificación del bolígrafo
Para codificar el brazo de 6 ejes para mover el bolígrafo y dibujar en la pizarra, hay algunas cosas que debemos considerar e incorporar en un proyecto. En esta lección, comenzarás a codificar el bolígrafo.
Configuración del efector final en VEXcode
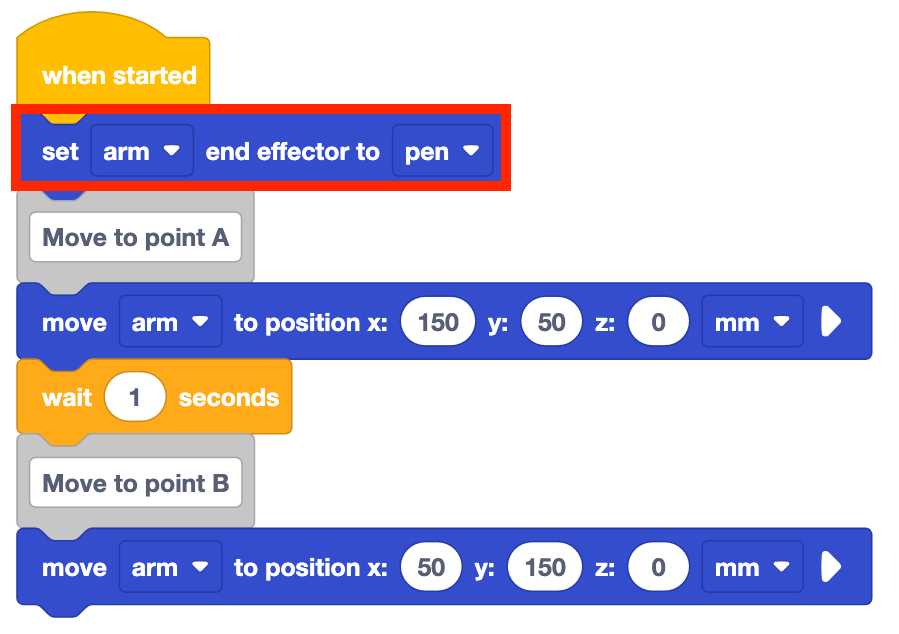
En los proyectos de esta Unidad, notará un nuevo bloque, el bloque Establecer efector final.
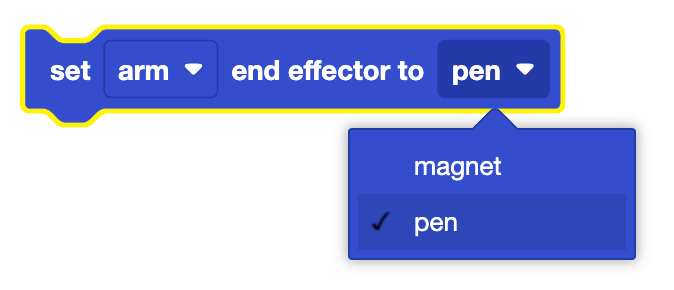
El bloque Establecer efector final se utiliza para comunicar al brazo de 6 ejes qué efector final se está utilizando para que pueda configurar el nuevo punto central de la herramienta (TCP). El efector final se puede cambiar utilizando la opción desplegable en el bloque.

En la Unidad 1 aprendiste que las coordenadas (x, y, z) del brazo de 6 ejes se determinan utilizando la distancia desde el origen hasta el TCP.
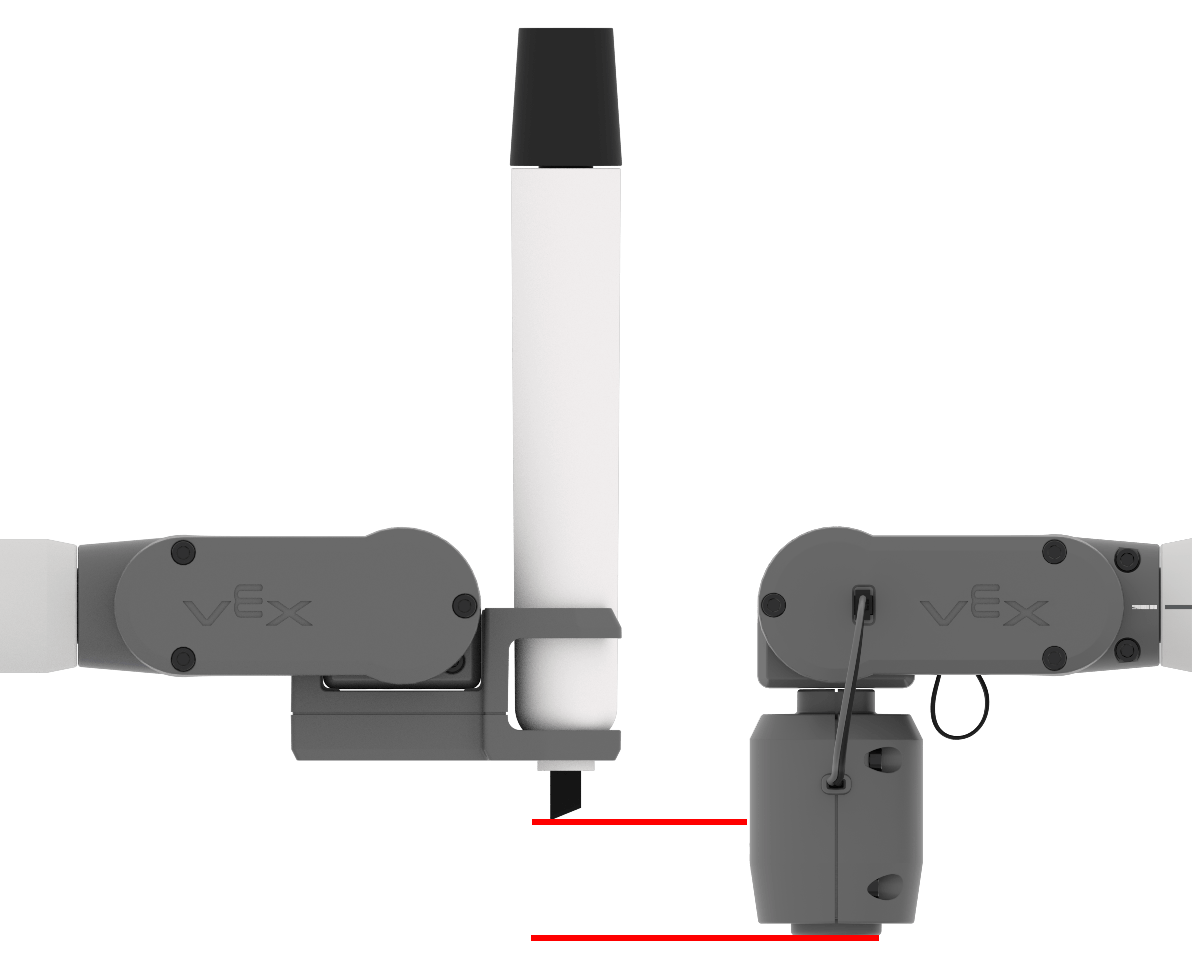
El TCP de la pluma tiene un valor z diferente al del imán. Si el bloque del
efector final establecido no se utiliza para ajustar el efector final, el
brazo de 6 ejes puede proporcionar coordenadas inexactas o moverse a una
ubicación no deseada.
Dibujar una línea
Ahora que comprende conceptualmente las partes del proyecto, siga los pasos a continuación para crear y ejecutar el proyecto y ver una línea dibujada en la pizarra.
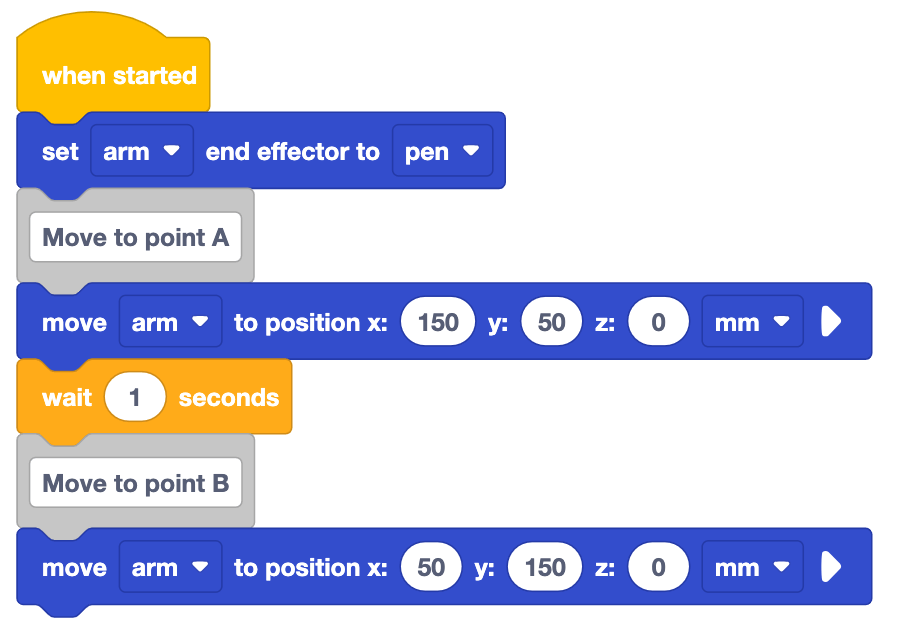
Abra un proyecto de nuevos bloques y vuelva a crear el proyecto que se muestra aquí.
Mira los bloques en el proyecto. ¿Cómo cree que se moverá el brazo de 6 ejes en función de este proyecto? Registre su predicción en su cuaderno de ingeniería.
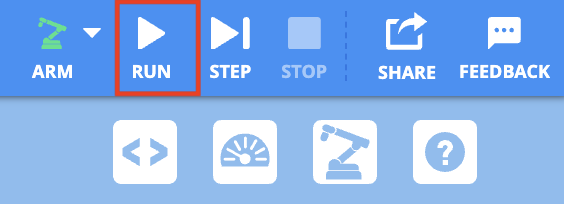
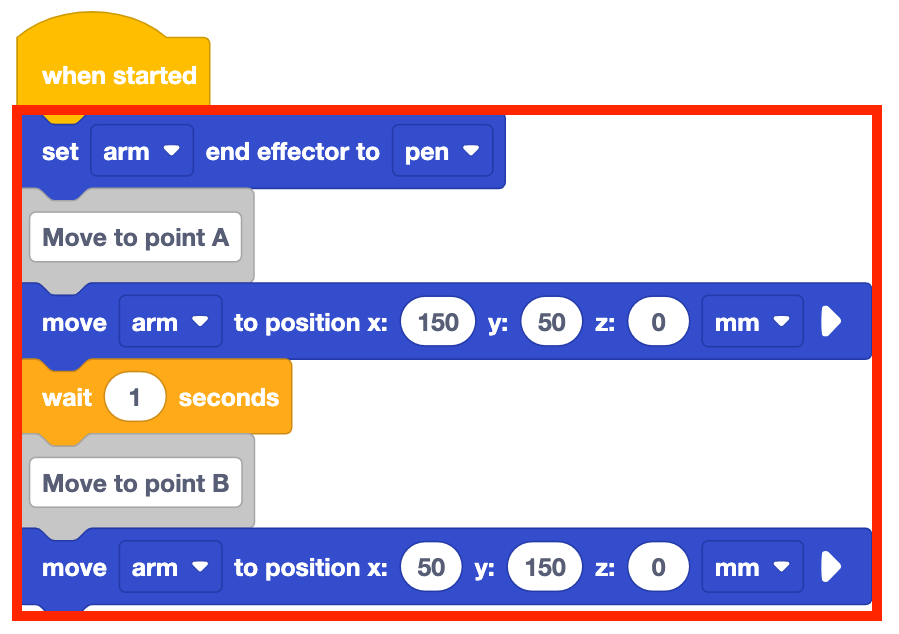
Asegúrese de que el brazo de 6 ejes esté conectado a VEXcode. Ejecutar el proyecto.
Observa cómo el brazo de 6 ejes usa el bolígrafo para dibujar una línea desde la primera coordenada hasta la segunda en la pizarra.
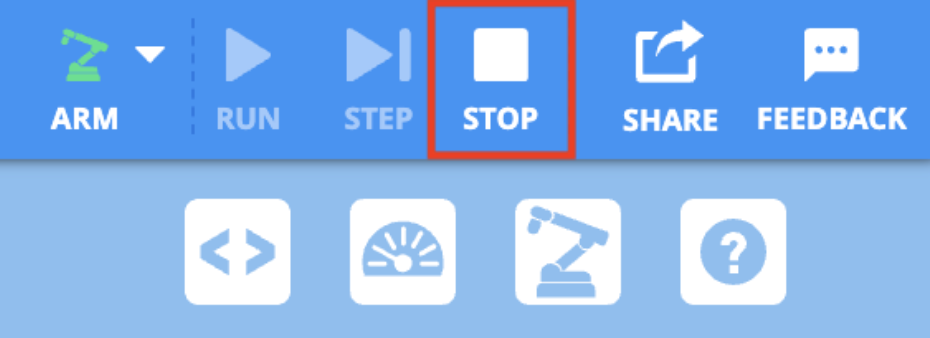
Detenga el proyecto una vez que el brazo de 6 ejes haya dejado de moverse.
¿Cómo se compara el movimiento del brazo de 6 ejes con su predicción anterior? Registre estas comparaciones en su cuaderno de ingeniería.
Compruebe su comprensión
Antes de pasar a la siguiente lección, asegúrate de comprender los conceptos de esta lección respondiendo las preguntas del siguiente documento en tu cuaderno de ingeniería.
Verifique sus preguntas de comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para aprender a codificar los movimientos del
brazo de 6 ejes para evitar obstáculos.