
Les 1: De pen gebruiken
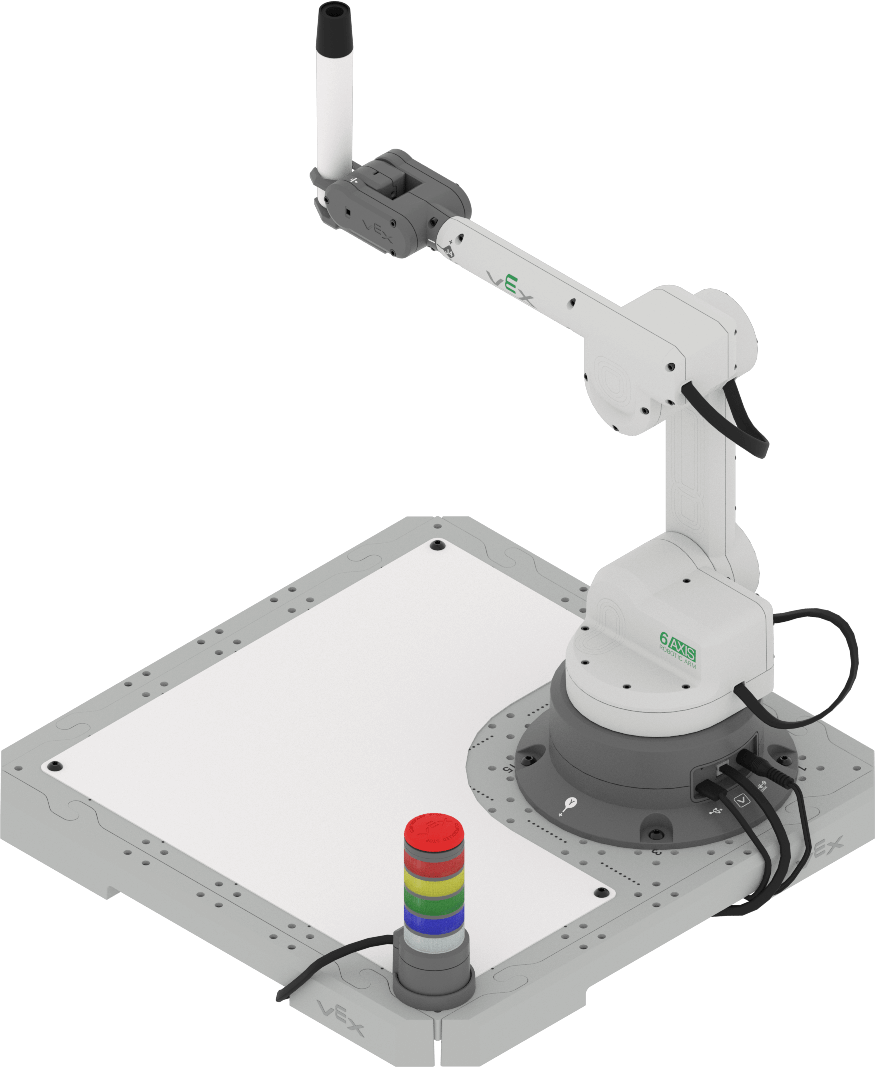
In de voorgaande units hebt u de magneet-oppaktool aan uw 6-assige robotarm bevestigd en gebruikt om schijven op de CTE-tegel op te pakken en te verplaatsen. In deze unit vervangt u het eindeffector door de Pen Holder Tool en gebruikt u een whiteboardmarker om op de tegel te tekenen met het whiteboardoppervlak.
In deze les leert u het volgende:
- Volg de bouwinstructies om de eind-effector te veranderen en het Dry-Erase-oppervlak toe te voegen.
- Leer hoe u de Pen gebruikt.
- Trek een lijn op de tegel.
Bekijk de onderstaande video om te zien hoe de 6-assige arm met de pen een diagonale lijn over het oppervlak van het whiteboard tekent.
Het veranderen van de eind-effector
In de vorige unit hebt u geleerd over de verschillende eindeffectoren in de CTE Workcell Kit. Volg de onderstaande stappen om uw build te wijzigen.
De pen coderen
Om de 6-assige arm te programmeren zodat deze de pen kan bewegen en op het whiteboard kan tekenen, zijn er een aantal zaken waarmee we rekening moeten houden en die we in een project moeten opnemen. In deze les ga je aan de slag met het coderen van de Pen.
De eind-effector instellen in VEXcode
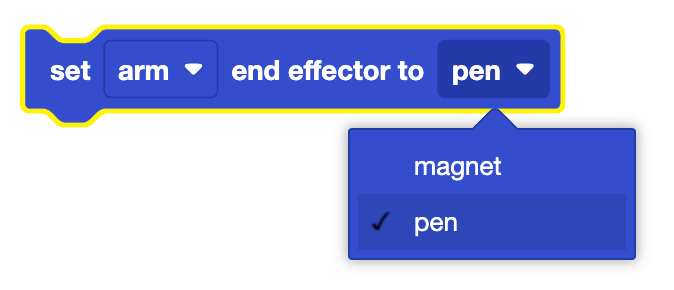
In de projecten in deze unit zult u een nieuw blok opmerken: het blok Set end effector.
Het Set end effector blok wordt gebruikt om aan de 6-assige arm door te geven welke eind-effector wordt gebruikt, zodat deze het nieuwe Tool Center Point (TCP) kan instellen. U kunt het eind-effector wijzigen via de vervolgkeuzelijst op het blok.
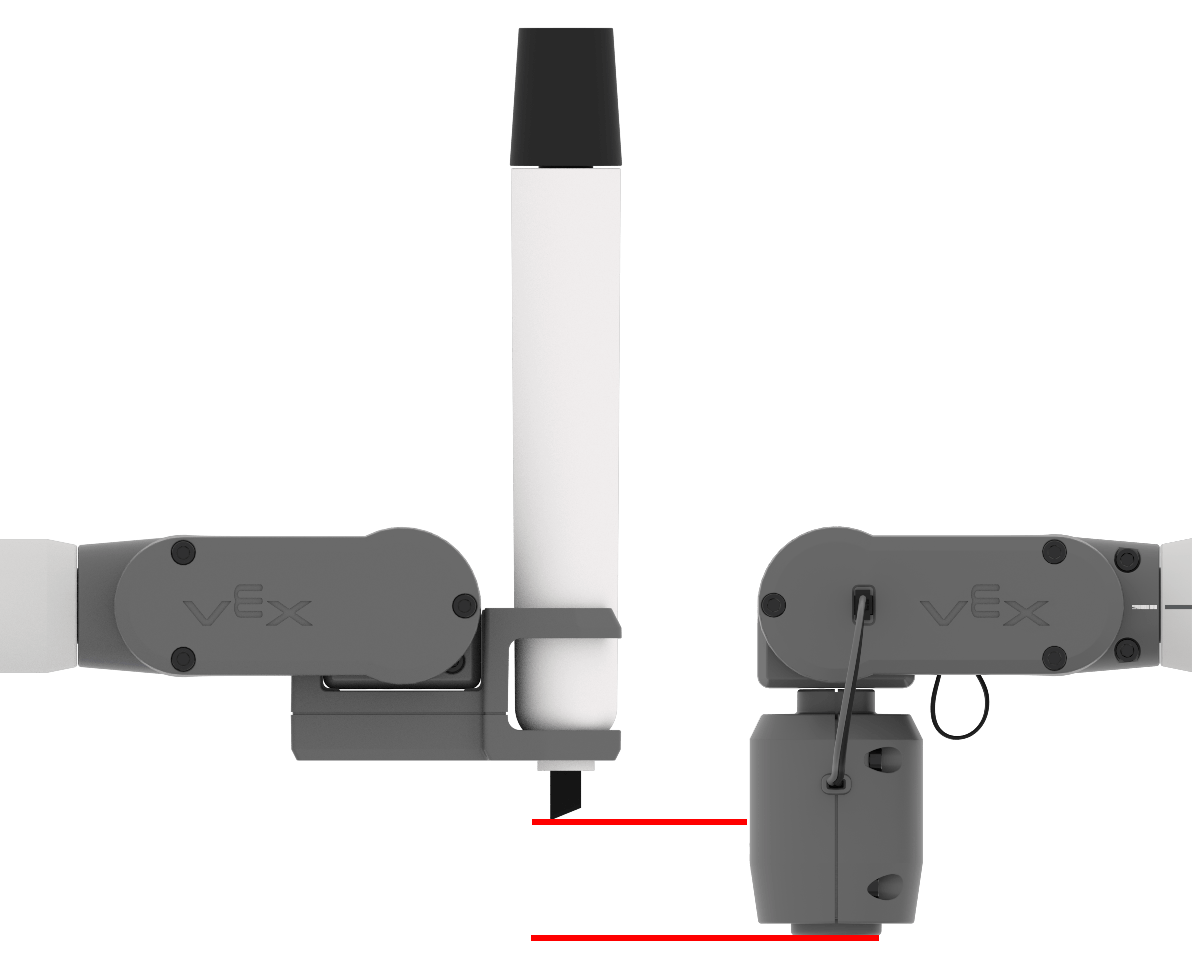
In Unit 1 leerde u dat de (x, y, z)-coördinaten van de 6-assige arm worden bepaald met behulp van de afstand van de oorsprong tot de TCP.

De TCP van de Pen heeft een andere z-waarde dan de Magneet. Als het eind-effector blok niet wordt gebruikt om de eind-effector aan te passen, kan de 6-assige arm onnauwkeurige coördinaten leveren of naar een onbedoelde locatie bewegen.
Een lijn tekenen
Nu u de onderdelen van het project conceptueel begrijpt, volgt u de onderstaande stappen om het project te maken en uit te voeren. Vervolgens ziet u een lijn op het whiteboard.
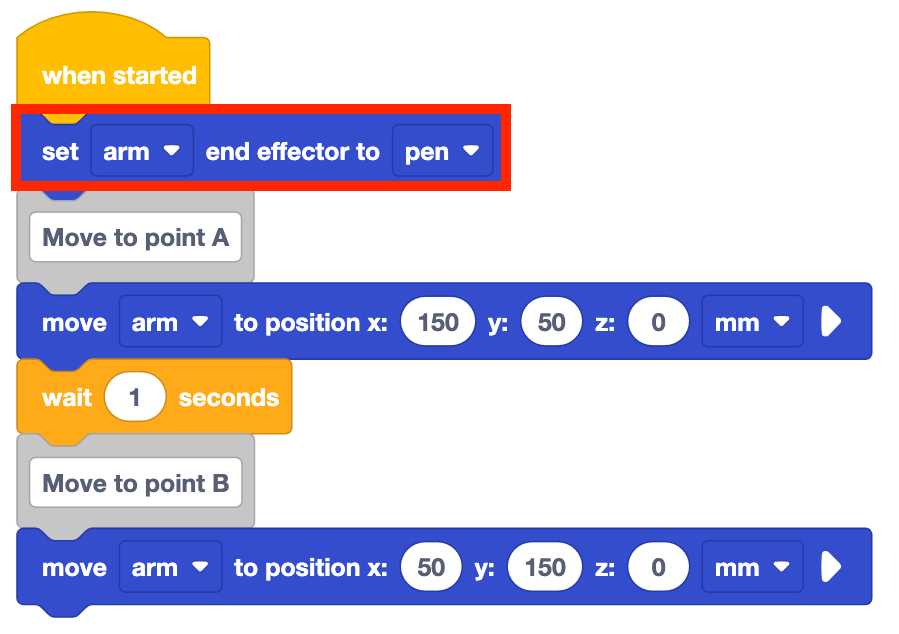
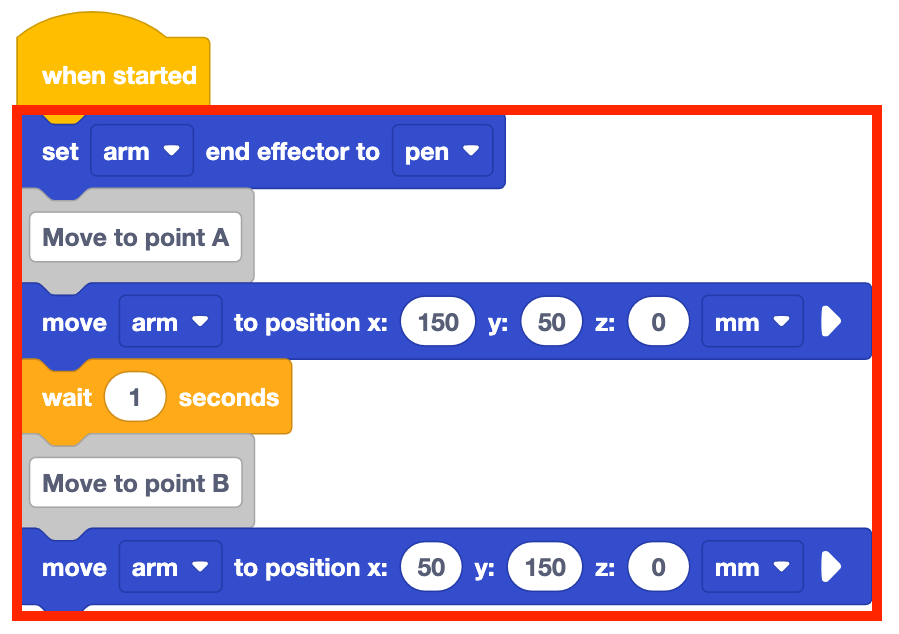
Open eenNew Blocks Project en maak het hier getoonde project opnieuw.
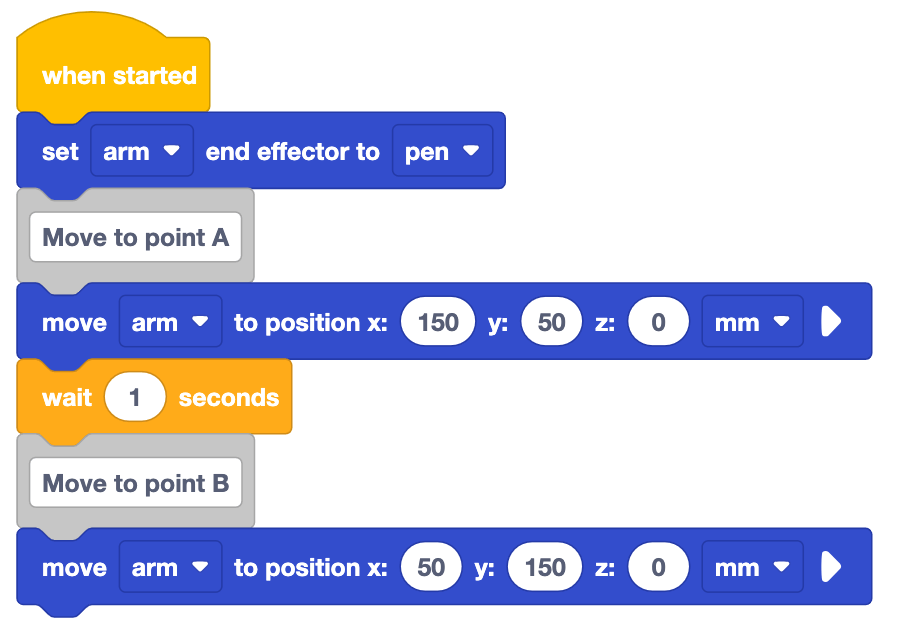
Kijk naar de blokken in het project. Hoe denk je dat de 6-assige arm zich zal bewegen op basis van dit project? Noteer uw voorspelling in uw technisch notitieboekje.
Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode. Voer het project uit.
Observeer hoe de 6-assige arm met de pen een lijn trekt van de eerste coördinaat naar de tweede op het whiteboard.

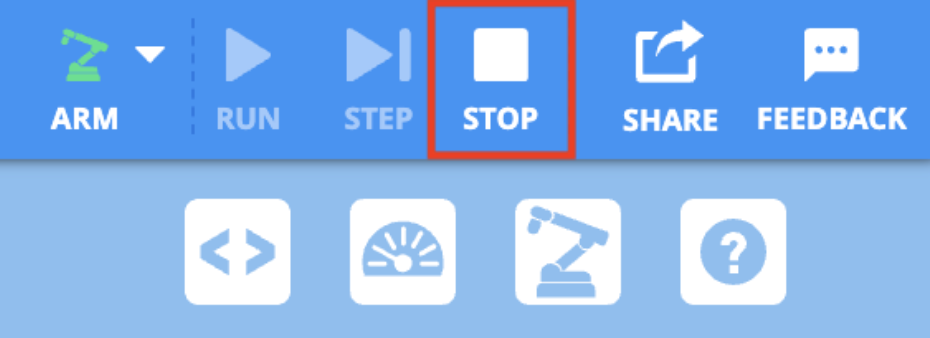
Stop het project zodra de 6-assige arm niet meer beweegt.
Hoe verhoudt de beweging van de 6-assige arm zich tot uw voorspelling hierboven? Noteer deze vergelijkingen in uw technisch notitieboekje.
Controleer uw begrip
Voordat u doorgaat naar de volgende les, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om te leren hoe u de bewegingen van de 6-assige arm kunt coderen om obstakels te vermijden.