
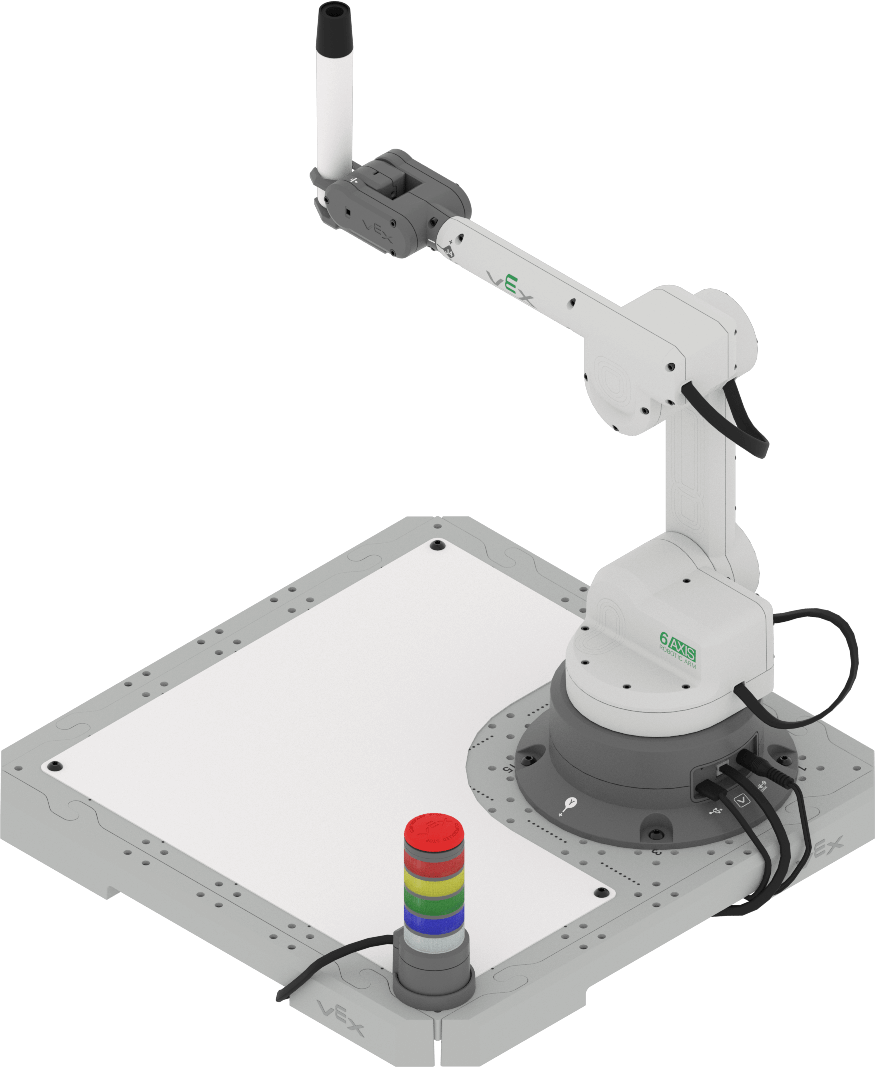
ในยูนิตก่อนหน้านี้คุณมีเครื่องมือรับแม่เหล็กติดอยู่กับแขนหุ่นยนต์ 6 แกนของคุณและใช้เพื่อรับและย้ายดิสก์บนกระเบื้อง CTE ในยูนิตนี้คุณจะเปลี่ยนเอฟเฟคเตอร์สิ้นสุดเป็นเครื่องมือจับปากกาและใช้เครื่องหมายลบแห้งเพื่อวาดบนกระเบื้องด้วยพื้นผิวลบแห้ง
ในบทเรียนนี้คุณจะ:
- ทำตามคำแนะนำในการสร้างเพื่อเปลี่ยนเอฟเฟ็กเตอร์สิ้นสุดและเพิ่มพื้นผิว Dry-Erase
- เรียนรู้เกี่ยวกับวิธีการใช้ปากกา
- ลากเส้นบนไทล์
ไฟล์วิดีโอ
การเปลี่ยนเอฟเฟคเตอร์สิ้นสุด
ในหน่วยก่อนหน้านี้คุณได้เรียนรู้เกี่ยวกับเอฟเฟคเตอร์สิ้นสุดที่แตกต่างกันใน CTE Workcell Kit ทำตามขั้นตอนด้านล่างเพื่อเปลี่ยนบิลด์
การเข้ารหัสปากกา
ในการเขียนรหัสแขน 6 แกนเพื่อเลื่อนปากกาและวาดบนไวท์บอร์ดมีบางสิ่งที่เราต้องพิจารณาและสร้างเป็นโครงการ ในบทเรียนนี้คุณจะได้รับการเริ่มต้นการเขียนโปรแกรมปากกา
การตั้งค่า End Effector ใน VEXcode
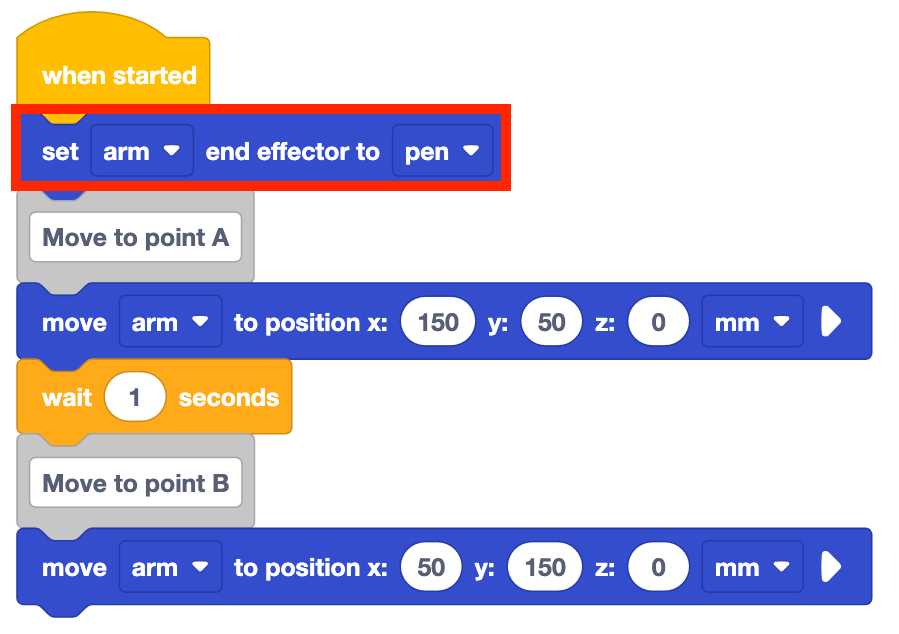
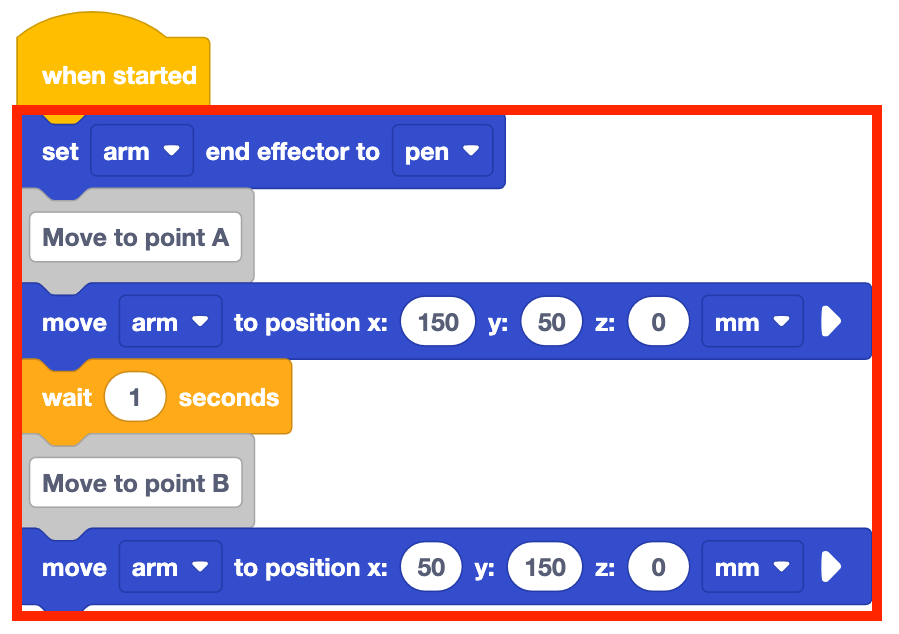
ในโปรเจกต์ในยูนิตนี้คุณจะสังเกตเห็นบล็อกใหม่คือ บล็อก ตั้งค่าเอฟเฟคเตอร์สิ้นสุด
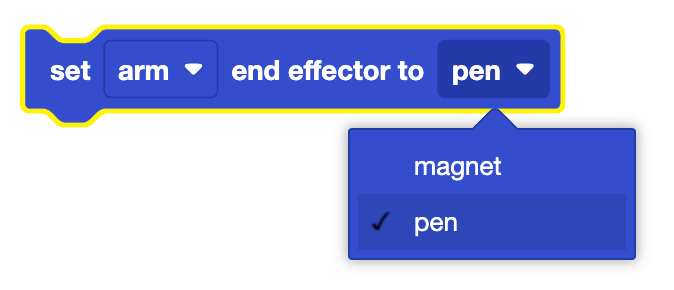
บล็อก Set end effector ใช้เพื่อสื่อสารกับแขน 6 แกนว่ากำลังใช้ end effector อะไรเพื่อให้สามารถตั้งค่า Tool Center Point (TCP) ใหม่ได้ เอฟเฟ็กเตอร์สิ้นสุดสามารถเปลี่ยนแปลงได้โดยใช้ตัวเลือกแบบเลื่อนลงบนบล็อก

ในหน่วยที่ 1 คุณได้เรียนรู้ว่าพิกัด (x, y, z) ของแขน 6 แกนถูกกำหนดโดยใช้ระยะทางจากจุดเริ่มต้นไปยัง TCP
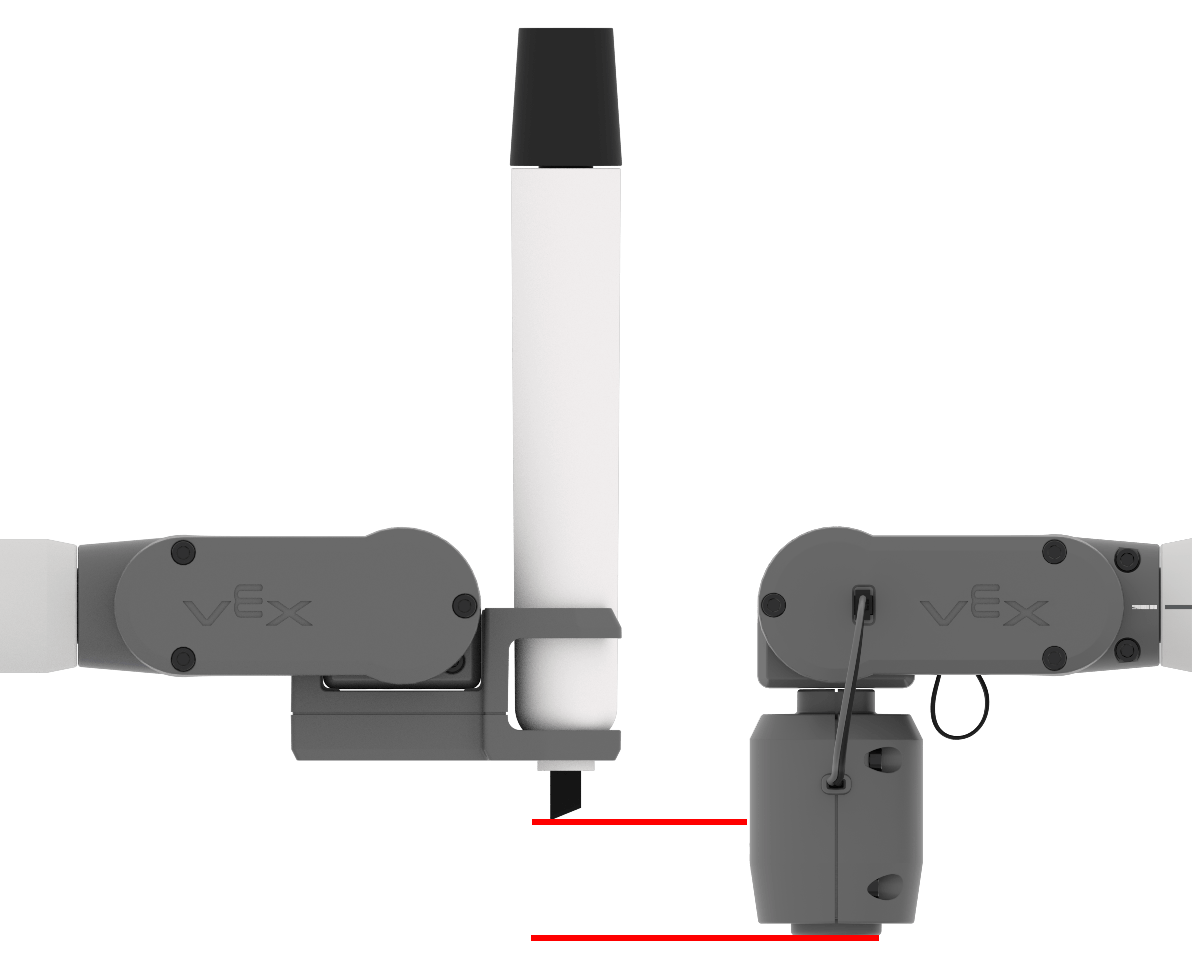
TCP ของปากกาอยู่ที่ค่า z ที่แตกต่างจากแม่เหล็ก หากไม่ได้ใช้ Set end
effector block เพื่อปรับ end effector แขน 6
แกนอาจให้พิกัดที่ไม่ถูกต้องหรือย้ายไปยังตำแหน่งที่ไม่ได้ตั้งใจ
การวาดเส้น
ตอนนี้คุณเข้าใจแนวคิดส่วนต่างๆของโครงการแล้วให้ทำตามขั้นตอนด้านล่างเพื่อสร้างและเรียกใช้โครงการและดูเส้นที่วาดบนไวท์บอร์ด
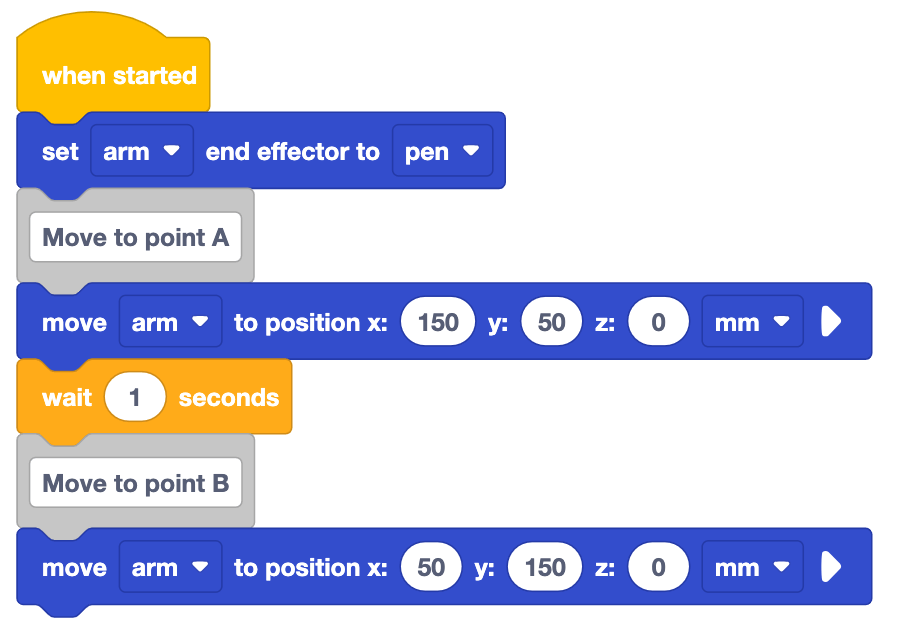
เปิดโครงการบล็อก ใหม่ และสร้างโครงการใหม่ที่แสดงที่นี่
ดูบล็อกในโปรเจกต์ คุณคิดว่าแกนแขน 6 แกนจะเคลื่อนไหวตามโครงการนี้อย่างไร? บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
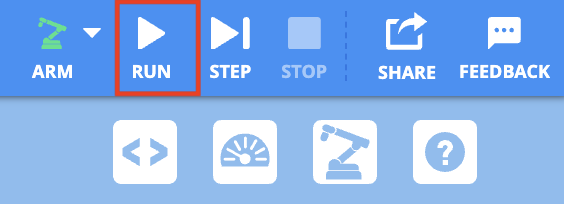
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว ดำเนินโครงการ
สังเกตว่าแขน 6 แกนใช้ปากกาลากเส้นจากพิกัดแรกไปยังพิกัดที่สองบนไวท์บอร์ด
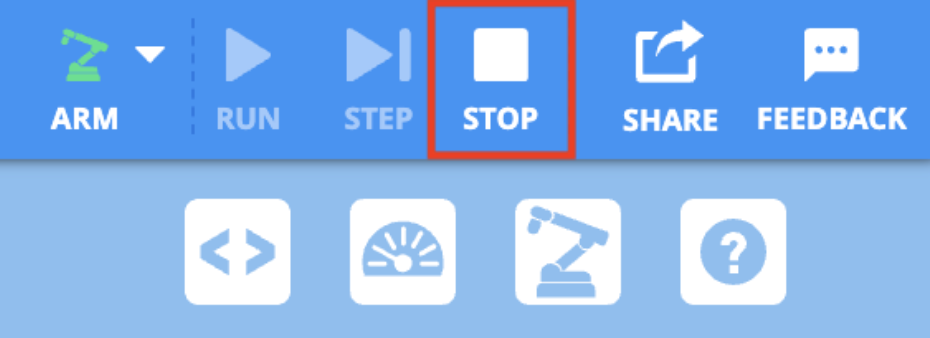
หยุดโครงการเมื่อแขน 6 แกนหยุดเคลื่อนไหว
การเคลื่อนที่ของแกนแขน 6 แกนเปรียบเทียบกับการคาดการณ์ของคุณข้างต้นอย่างไร? บันทึกการเปรียบเทียบเหล่านี้ลงในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะย้ายไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัดไป > เพื่อเรียนรู้เกี่ยวกับการเข้ารหัสการเคลื่อนไหวของแขน 6
แกนเพื่อหลีกเลี่ยงสิ่งกีดขวาง