
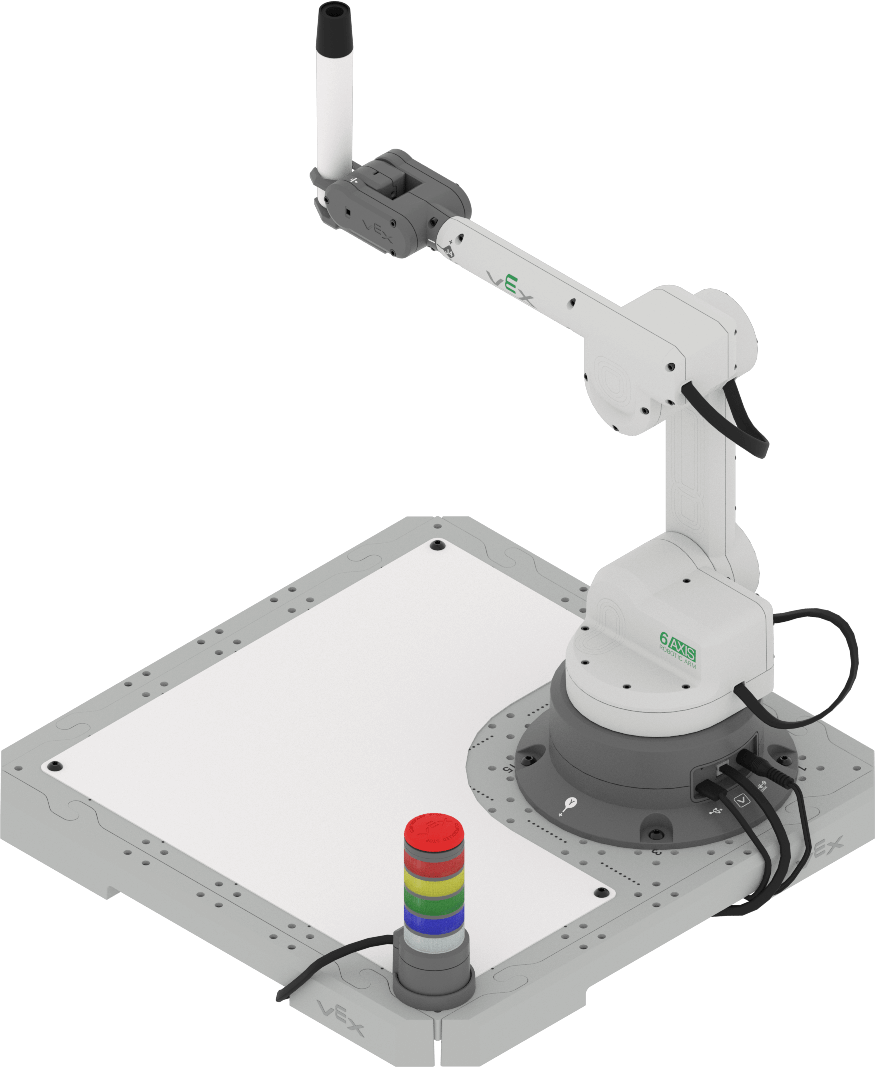
Dans les unités précédentes, l'outil de ramassage d'aimants était attaché à votre bras robotique à 6 axes et l'utilisait pour ramasser et déplacer des disques sur la tuile CTE. Dans cette unité, vous changerez l'effecteur d'extrémité en outil de support de stylo et utiliserez un marqueur effaçable à sec pour dessiner sur la tuile avec la surface d'effacement à sec.
Dans cette leçon, vous allez :
- suivez les instructions de construction pour changer l'effecteur final et ajouter la surface d'effacement à sec.
- apprendre à utiliser le stylo.
- tracez une ligne sur la tuile.
Fichier vidéo
Changement de l'effecteur d'extrémité
Dans l'unité précédente, vous avez découvert différents effecteurs d'extrémité dans le kit de cellule de travail CTE. Suivez les étapes ci-dessous pour modifier votre version.
Codage du stylo
Afin de coder le bras à 6 axes pour déplacer le stylo et dessiner sur le tableau blanc, il y a certaines choses que nous devons considérer et intégrer dans un projet. Dans cette leçon, vous commencerez à coder le stylo.
Réglage de l'effecteur de fin dans VEXcode
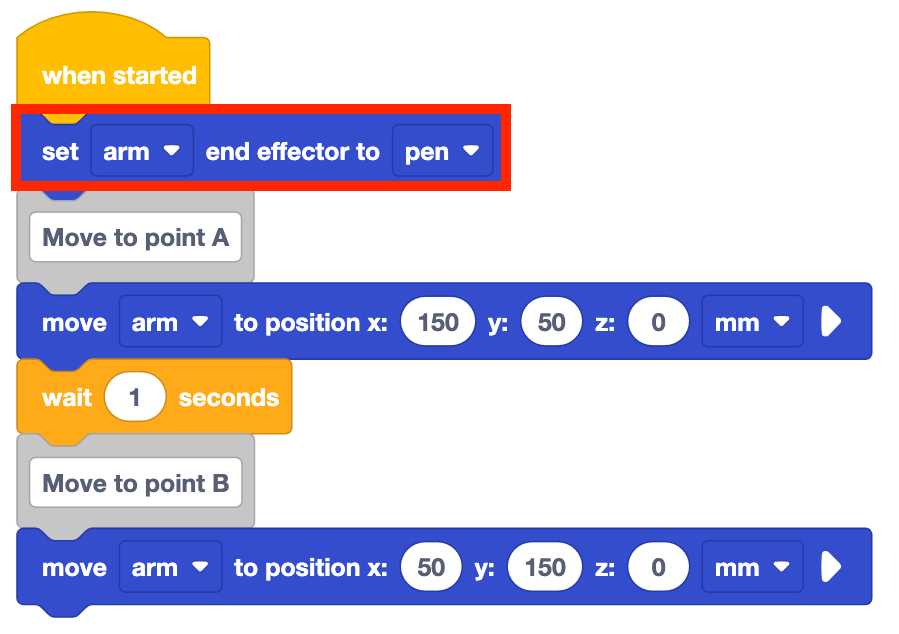
Dans les projets de cette unité, vous remarquerez un nouveau bloc, le bloc Set end effector.
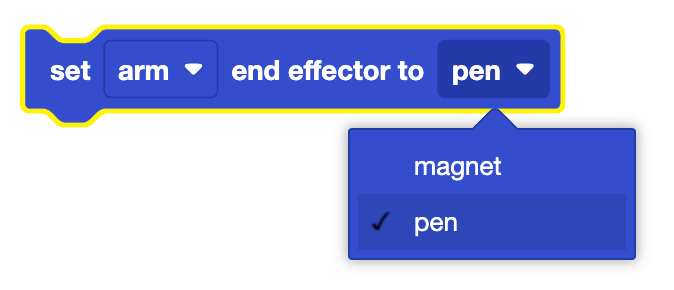
Le bloc de réglage de l'effecteur d'extrémité est utilisé pour communiquer au bras à 6 axes quel effecteur d'extrémité est utilisé afin qu'il puisse définir le nouveau point central de l'outil (TCP). L'effecteur final peut être changé en utilisant l'option déroulante sur le bloc.

Dans l'unité 1, vous avez appris que les coordonnées (x, y, z) du bras à 6 axes sont déterminées à l'aide de la distance entre l'origine et le TCP.
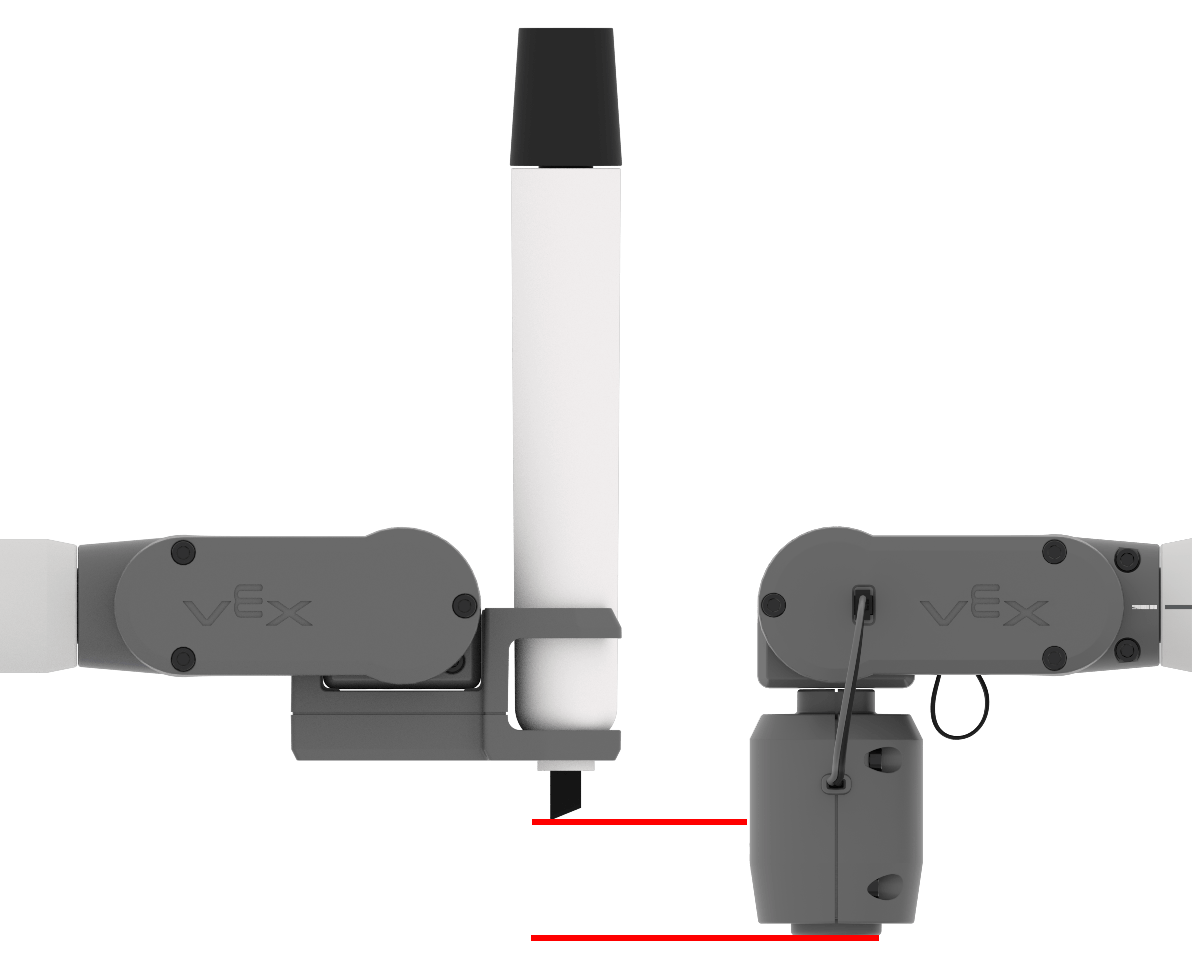
Le TCP du stylo a une valeur z différente de celle de l'aimant. Si le bloc
de réglage de l'effecteur d'extrémité n'est pas utilisé pour régler
l'effecteur d'extrémité, le bras à 6 axes peut fournir des coordonnées inexactes
ou se déplacer vers un emplacement involontaire.
Tracer une ligne
Maintenant que vous comprenez conceptuellement les parties du projet, suivez les étapes ci-dessous pour créer et exécuter le projet et voir une ligne tracée sur le tableau blanc.
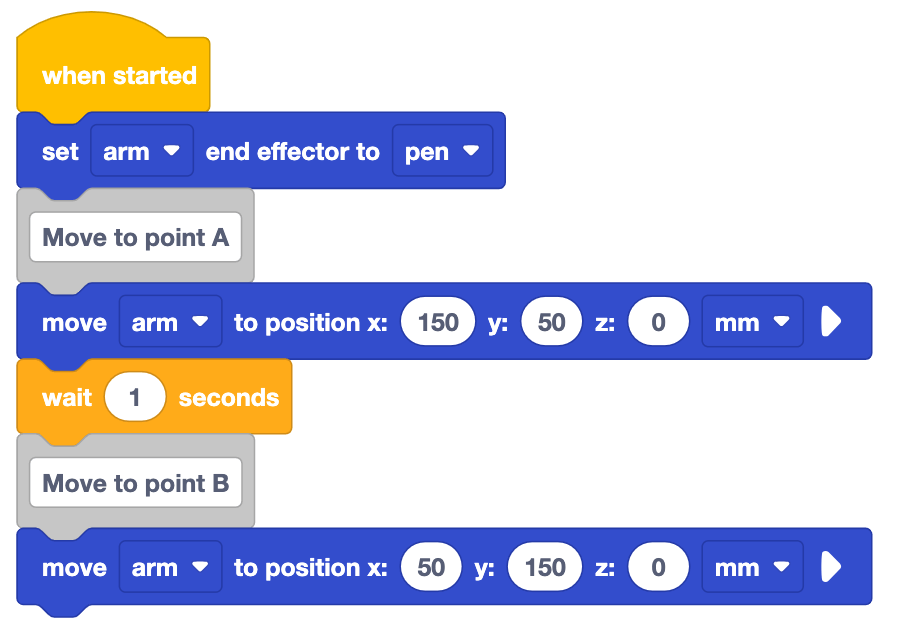
Ouvrez un projet New Blocks et recréez le projet illustré ici.
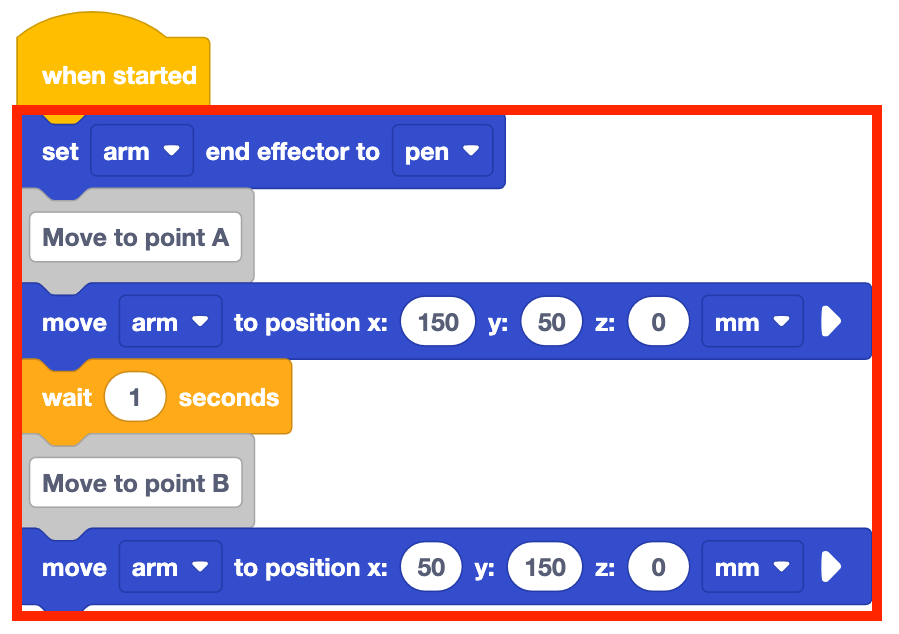
Regardez les blocs dans le projet. Comment pensez-vous que le bras à 6 axes se déplacera en fonction de ce projet ? Enregistrez votre prévision dans votre cahier d'ingénierie.
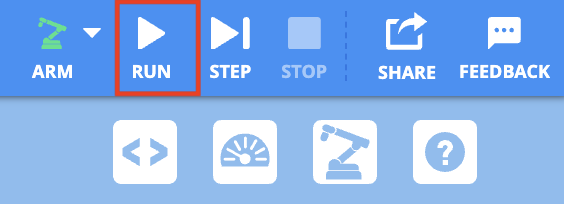
Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet.
Observez comment le bras à 6 axes utilise le stylo pour tracer une ligne de la première coordonnée à la seconde sur le tableau blanc.
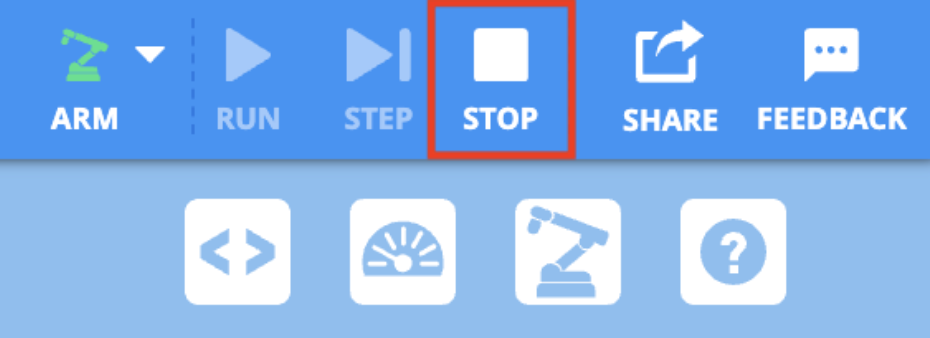
Arrêtez le projet une fois que le bras à 6 axes a cessé de bouger.
Comment le mouvement du bras à 6 axes se compare-t-il à votre prédiction ci-dessus ? Enregistrez ces comparaisons dans votre cahier d'ingénierie.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour en savoir plus sur le codage des mouvements
du bras à 6 axes afin d'éviter les obstacles.